The Dynamic Search for the Minimal Dynamic Extension
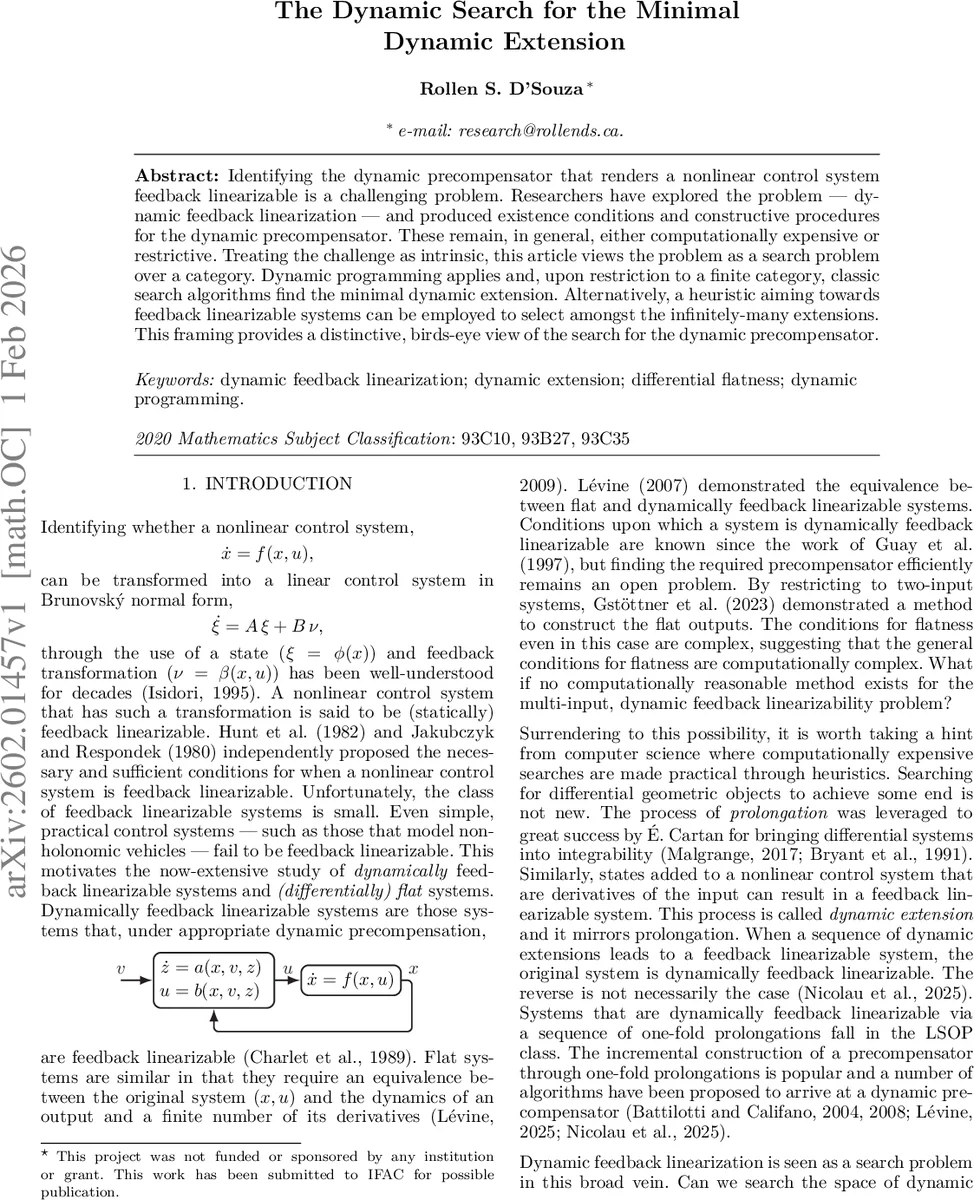
Identifying the dynamic precompensator that renders a nonlinear control system feedback linearizable is a challenging problem. Researchers have explored the problem – dynamic feedback linearization – and produced existence conditions and constructive procedures for the dynamic precompensator. These remain, in general, either computationally expensive or restrictive. Treating the challenge as intrinsic, this article views the problem as a search problem over a category. Dynamic programming applies and, upon restriction to a finite category, classic search algorithms find the minimal dynamic extension. Alternatively, a heuristic aiming towards feedback linearizable systems can be employed to select amongst the infinitely-many extensions. This framing provides a distinctive, birds-eye view of the search for the dynamic precompensator.
💡 Research Summary
The paper tackles the long‑standing problem of finding a dynamic pre‑compensator that makes a nonlinear control system feedback‑linearizable. Traditional approaches rely on differential‑geometric conditions—vector relative degree, derived flag involutivity, and controllability—to decide static feedback linearizability. However, these conditions are restrictive and computationally prohibitive for multi‑input systems, and they do not directly yield the dynamic extension needed for dynamic feedback linearization.
The authors recast the problem in the language of category theory. A nonlinear system (\dot x = f(x,u)) is represented as an exterior differential system (I^{(0)}) on the manifold (M = \mathbb{R}\times X \times U). The derived flag (I^{(k)}) captures how inputs affect higher‑order Lie derivatives of state functions. An output (h) with vector relative degree (\kappa) defines a regular zero‑dynamics foliation: the level sets of (h) form a foliation whose leaves are invariant under the dynamics. This foliation is encoded by a differential ideal (I(Z)) and can be constructed via Frobenius’ theorem.
Dynamic extension is then defined as the addition of new state variables that correspond to integrators of the virtual inputs (v_j = L_f^{\kappa_j} h_j). The authors introduce the notion of an “extension system”: two regular nonlinear control systems ((M_1,I^{(0)}_1)) and ((M_2,I^{(0)}_2)) together with a smooth submersion (\pi: M_2\to M_1) satisfying (i) (\pi^* I^{(0)}_1\subset I^{(0)}_2) and (ii) preservation of a regular zero‑dynamics foliation. Condition (ii) guarantees that the new states “cover” the derivatives of the virtual inputs, ensuring that the lifted system truly extends the base system.
The central theoretical contribution is Theorem 5, which shows that any extension system with a dimension increase of at least two can be factored through an intermediate system, effectively decomposing a multi‑step extension into a sequence of one‑step extensions. Consequently, any system that becomes feedback‑linearizable after a finite number of extensions belongs to the LSOP class (Linearizable via Single‑step One‑fold Prolongations) identified in earlier work.
Having established the categorical structure, the paper brings in dynamic programming. The principle of optimality is reformulated as “optimal arrow selection” within a category: objects are systems (or their states) and arrows are extensions. A cost function assigns a weight to each arrow based on the number of added states, computational burden, and implementation considerations. In a finite sub‑category, classic shortest‑path algorithms (Dijkstra, A*) can be applied directly to find the minimal‑cost path from the original system to a feedback‑linearizable one. For the infinite category, the authors propose a heuristic that prioritizes extensions derived from outputs of vector relative degree zero, because such outputs are most likely to lead quickly to a regular zero‑dynamics foliation that satisfies the involutivity condition.
The paper’s structure proceeds as follows: Section 1 motivates dynamic feedback linearization and reviews prior geometric conditions. Section 2 introduces the necessary differential‑geometric preliminaries (forms, ideals, foliations). Section 3 formalizes regular zero‑dynamics foliations, defines dynamic extensions, and proves the existence of extension systems and their decomposition (Theorem 5). Section 4 translates Bellman’s dynamic programming into categorical terms and describes the optimal‑search algorithm. Section 5 demonstrates the methodology on simple illustrative examples, showing how the algorithm discovers the minimal dynamic extension. The conclusion highlights that the categorical‑dynamic‑programming framework overcomes the computational bottlenecks of earlier geometric methods and offers a systematic, scalable way to search the space of dynamic extensions, even when that space is infinite.
In summary, the authors provide a novel, high‑level perspective on dynamic feedback linearization: by viewing dynamic extensions as arrows in a category, they enable the use of well‑established search and optimization techniques to efficiently locate the smallest possible extension that renders a nonlinear system feedback‑linearizable. This bridges differential geometry, control theory, and computer‑science search algorithms, opening new avenues for practical controller synthesis in complex nonlinear systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment