Towards a Novel Wearable Robotic Vest for Hemorrhage Suppression
This paper introduces a novel robotic system designed to manage severe bleeding in emergency scenarios, including unique environments like space stations. The robot features a shape-adjustable “ring mechanism”, transitioning from a circular to an elliptical configuration to adjust wound coverage across various anatomical regions. We developed various arms for this ring mechanism with varying flexibilities to improve adaptability when applied to non-extremities of the body (abdomen, back, neck, etc.). To apply equal and constant pressure across the wound, we developed an inflatable ring and airbag balloon that are compatible with this shape-changing ring mechanism. A series of experiments focused on evaluating various ring arm configurations to characterize their bending stiffness. Subsequent experiments measured the force exerted by the airbag balloon system using a digital scale. Despite its promising performance, certain limitations related to coverage area are identified. The shape-changing effect of the device is limited to scenarios involving partially inflated or deflated airbag balloons, and cannot fully conform to complex anatomical regions. Finally, the device was tested on casualty simulation kits, where it successfully demonstrated its ability to control simulated bleeding.
💡 Research Summary
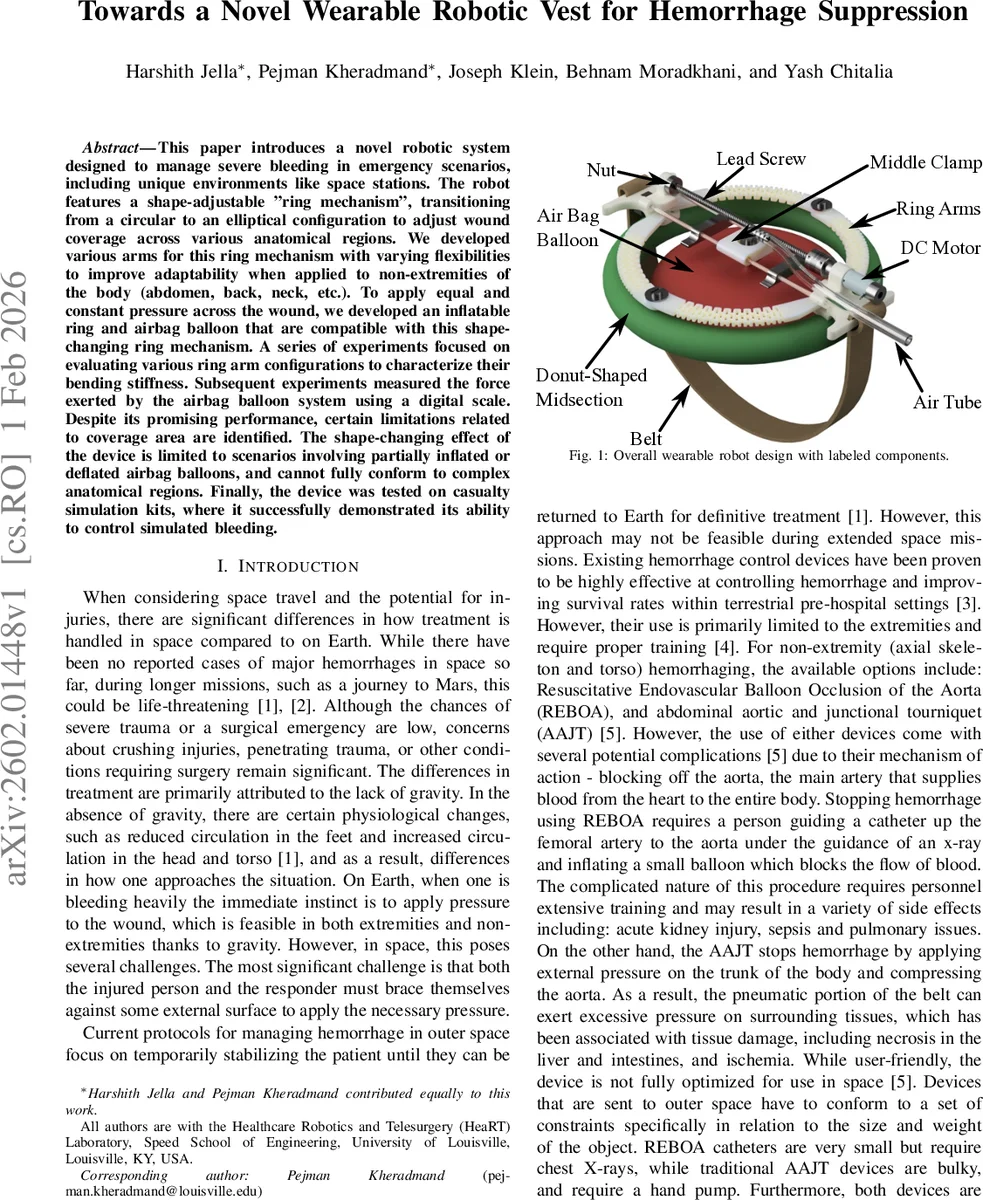
The paper presents a novel wearable robotic vest designed to control severe hemorrhage in emergency scenarios, including the unique constraints of space missions. The system integrates a shape‑adjustable “ring mechanism” that can transition from a circular to an elliptical configuration, allowing the device to conform to a variety of wound geometries on non‑extremity body regions such as the abdomen, back, and neck. The core components are: (1) a top‑layer actuator consisting of a DC motor and lead‑screw that drives two symmetric ring arms; (2) an inflatable mid‑section ring fabricated from layered thermoplastic elastomer (TPE) and PTFE; and (3) a central airbag balloon made from TPE sheets, rubber bands, and tendons. Three ring‑arm designs (standard, cutout, and ridge) were fabricated and evaluated.
Mechanical modeling employed Castigliano’s first theorem to relate out‑of‑plane tip forces to tip deflection, yielding an expression for bending stiffness (EI). Experimental validation used four Vero motion‑capture cameras to track tip displacement under four discrete loads (0–20 N). Results showed that the ridge design achieved the lowest bending stiffness (≈2.7 × 10⁻⁷ N·m²) while maintaining a favorable stress distribution, making it the preferred choice for flexibility without compromising durability. Finite‑element simulations in ANSYS corroborated the experimental data.
The inflatable ring expands from a deflated volume of 1,788 mm³ to 8,350 mm³ at 4.83 kPa, while the airbag balloon expands from 13,169 mm³ to 1,830,508 mm³ under the same pressure. Pressure testing with a digital scale demonstrated that the airbag can exert a steady normal force of roughly 12 N at 4.83 kPa, a level sufficient to compress bleeding vessels without causing excessive tissue damage. The system was then tested on a casualty simulation kit that mimics human torso bleeding. When the robot was positioned over a linear wound, the top‑layer actuator reshaped the ring arms to an elliptical form, the airbag inflated, and continuous pressure halted the simulated blood flow for at least five minutes, outperforming conventional tourniquet‑type devices that provide only intermittent compression.
Despite promising results, the authors acknowledge several limitations. The shape‑changing capability depends on the airbag being partially inflated; fully inflated or completely deflated states lock the geometry, preventing adaptation to highly contoured anatomical regions (e.g., rib cage). The inflatable components are designed for single‑use, raising concerns about waste and the need for replacement parts in remote missions. Pressure monitoring relies on a simple gauge, lacking closed‑loop feedback for automatic pressure regulation. Moreover, no human subject testing was performed, leaving open questions about skin irritation, long‑term wear comfort, and real‑world reliability.
Future work is outlined to address these gaps: (i) optimization of ring‑arm geometry and material to broaden conformability; (ii) integration of pressure sensors and a feedback controller for autonomous pressure adjustment; (iii) development of reusable, high‑performance inflatable materials; (iv) comprehensive human trials to assess safety, ergonomics, and efficacy; and (v) further miniaturization and weight reduction to meet strict spacecraft payload constraints.
In summary, the study introduces a versatile, soft‑robotic wearable that can apply constant, controllable pressure to non‑extremity wounds, filling a critical gap in both terrestrial pre‑hospital care and space‑based trauma management. The combination of a mechanically reconfigurable ring, soft inflatable structures, and quantitative experimental validation positions this work as a significant step toward next‑generation hemorrhage‑control devices.
Comments & Academic Discussion
Loading comments...
Leave a Comment