LocalScore: Local Density-Aware Similarity Scoring for Biometrics
Open-set biometrics faces challenges with probe subjects who may not be enrolled in the gallery, as traditional biometric systems struggle to detect these non-mated probes. Despite the growing prevalence of multi-sample galleries in real-world deployments, most existing methods collapse intra-subject variability into a single global representation, leading to suboptimal decision boundaries and poor open-set robustness. To address this issue, we propose LocalScore, a simple yet effective scoring algorithm that explicitly incorporates the local density of the gallery feature distribution using the k-th nearest neighbors. LocalScore is architecture-agnostic, loss-independent, and incurs negligible computational overhead, making it a plug-and-play solution for existing biometric systems. Extensive experiments across multiple modalities demonstrate that LocalScore consistently achieves substantial gains in open-set retrieval (FNIR@FPIR reduced from 53% to 40%) and verification (TAR@FAR improved from 51% to 74%). We further provide theoretical analysis and empirical validation explaining when and why the method achieves the most significant gains based on dataset characteristics.
💡 Research Summary
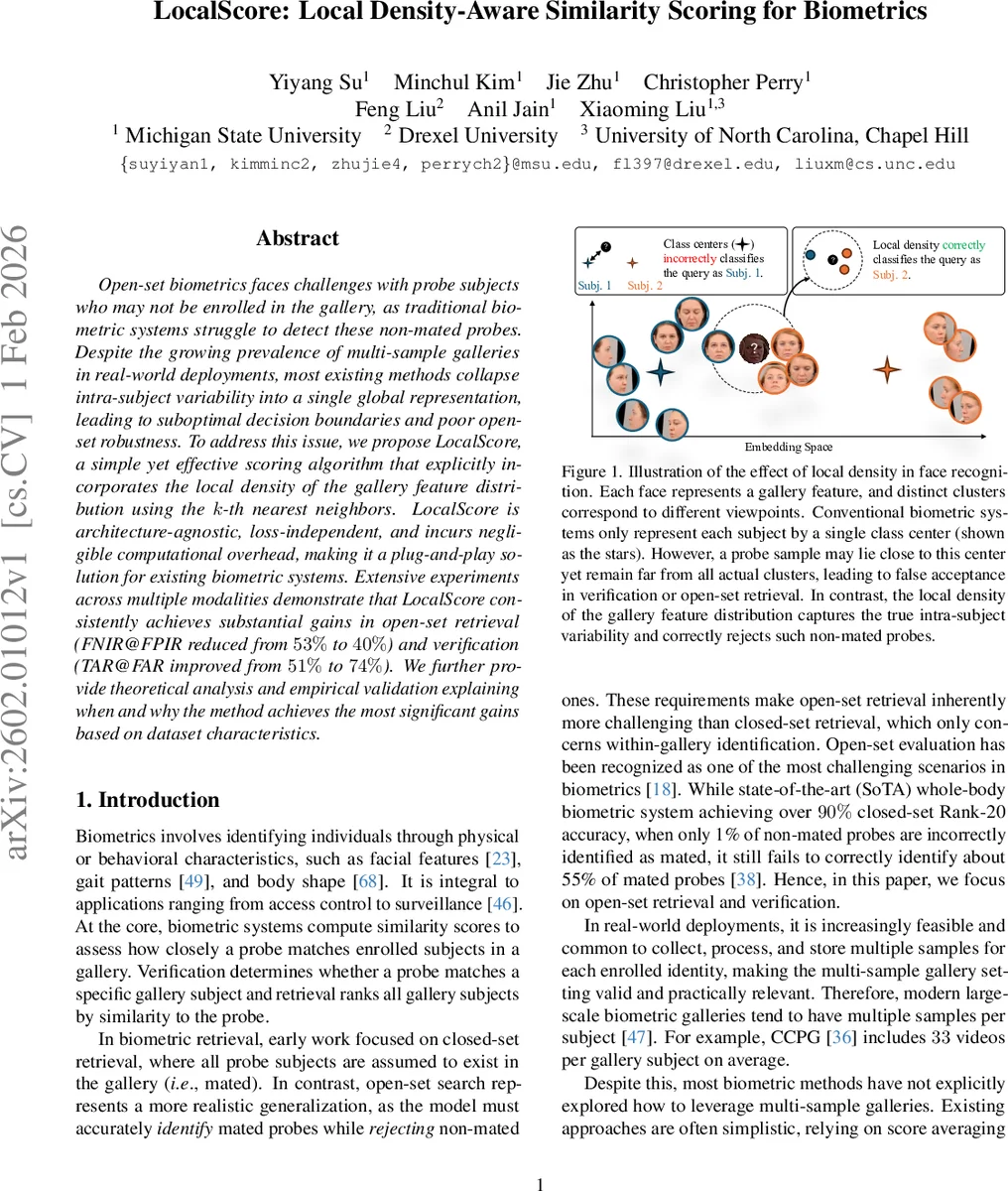
The paper tackles a fundamental weakness of most modern biometric systems in open‑set scenarios: the inability to reliably reject probe samples that are not enrolled in the gallery. Existing approaches typically collapse all samples of a subject into a single global representation (a class center) and compute similarity between a probe and that center. While this works reasonably well for closed‑set verification, it ignores the fact that in real deployments each subject is often represented by many samples captured under diverse conditions (different poses, illumination, viewpoints, etc.). Consequently, the distribution of a subject’s gallery features frequently forms several distinct clusters. A probe that lies near the global mean but far from any true cluster can be falsely accepted, and genuine probes from under‑represented clusters can be mistakenly rejected.
LocalScore is introduced as a lightweight, architecture‑agnostic plug‑in that augments the traditional similarity score with a measure of local gallery density. The method proceeds as follows:
-
k‑th nearest‑neighbor similarity – For a probe q, the cosine similarity to every gallery feature is computed. The k‑th largest similarity value, denoted s_i(k) for subject i, quantifies how close q is to the densest region of that subject’s feature cloud. Genuine probes tend to have high s_i(k), impostors low s_i(k).
-
Selective fusion – The conventional per‑subject score s_i (e.g., the maximum similarity to any of the subject’s samples) is retained. Rather than averaging s_i and s_i(k) across all subjects, the algorithm identifies the subject with the highest s_i (call it i*) and adds the k‑NN score only for that subject: \
Comments & Academic Discussion
Loading comments...
Leave a Comment