SPARK: Stochastic Propagation via Affinity-guided Random walK for training-free unsupervised segmentation
We argue that existing training-free segmentation methods rely on an implicit and limiting assumption, that segmentation is a spectral graph partitioning problem over diffusion-derived affinities. Such approaches, based on global graph partitioning and eigenvector-based formulations of affinity matrices, suffer from several fundamental drawbacks, they require pre-selecting the number of clusters, induce boundary oversmoothing due to spectral relaxation, and remain highly sensitive to noisy or multi-modal affinity distributions. Moreover, many prior works neglect the importance of local neighborhood structure, which plays a crucial role in stabilizing affinity propagation and preserving fine-grained contours. To address these limitations, we reformulate training-free segmentation as a stochastic flow equilibrium problem over diffusion-induced affinity graphs, where segmentation emerges from a stochastic propagation process that integrates global diffusion attention with local neighborhoods extracted from stable diffusion, yielding a sparse yet expressive affinity structure. Building on this formulation, we introduce a Markov propagation scheme that performs random-walk-based label diffusion with an adaptive pruning strategy that suppresses unreliable transitions while reinforcing confident affinity paths. Experiments across seven widely used semantic segmentation benchmarks demonstrate that our method achieves state-of-the-art zero-shot performance, producing sharper boundaries, more coherent regions, and significantly more stable masks compared to prior spectral-clustering-based approaches.
💡 Research Summary
The paper “SPARK: Stochastic Propagation via Affinity‑guided Random Walk for training‑free unsupervised segmentation” critically examines the limitations of current training‑free segmentation approaches that rely on diffusion‑derived affinities and spectral graph partitioning. Existing methods typically construct a global affinity matrix from the self‑attention maps of a frozen diffusion model (e.g., Stable Diffusion) and then solve an eigen‑vector‑based partitioning problem (spectral clustering, normalized cuts, etc.). While this captures long‑range semantic similarity, it suffers from three fundamental drawbacks: (1) eigenvectors of the graph Laplacian are highly unstable to small perturbations in the diffusion attention, leading to fragmented or inconsistent segmentations; (2) the spectral relaxation favors low‑frequency global modes, causing oversmoothing of object boundaries and loss of fine‑grained details; (3) these methods require a pre‑specified number of clusters, which is unrealistic for natural images where the number of objects varies widely. Moreover, prior works often ignore local spatial structure, which is essential for stabilizing affinity propagation and preserving sharp contours.
To overcome these issues, the authors reformulate segmentation as a stochastic flow equilibrium problem on a diffusion‑induced affinity graph. The key idea is to replace eigen‑vector computation with a Markov‑based random‑walk propagation that naturally discovers coherent regions without any prior on the number of clusters. Their method, named SPARK, builds a sparse yet expressive transition matrix by fusing two complementary affinity sources:
- Global diffusion affinity (A_global) – computed as the inner product of token features extracted from the last layer of a frozen Stable Diffusion U‑Net. This captures semantic similarity across distant but conceptually related regions.
- Local spatial affinity (A_local) – constructed over an 8‑connected pixel neighborhood using cosine similarity of the same diffusion features, ensuring spatial smoothness and boundary sensitivity.
Both matrices are row‑normalized and linearly combined with a balance parameter β (0 ≤ β ≤ 1) to obtain the final stochastic matrix S = β S_global + (1‑β) S_local. This fused matrix serves as the transition operator for the subsequent stochastic flow.
The stochastic flow is realized through an iterative Markov‑Clustering‑inspired update consisting of four steps:
- Expansion – raise the matrix to the ℓ‑th power (P^ℓ) to propagate multi‑hop connections, strengthening intra‑cluster cohesion.
- Inflation – apply an element‑wise power r > 1, amplifying strong transitions while suppressing weak ones, effectively sharpening the connectivity pattern.
- Pruning – zero out entries below a threshold τ, enforcing sparsity and preventing noisy links from influencing the dynamics.
- Row‑Normalization – restore stochasticity after each iteration.
Repeated application of this operator drives the matrix toward a block‑diagonal fixed point P*. Each block corresponds to an ergodic component of the underlying Markov chain, i.e., a flow‑preserving cluster. Importantly, the number of clusters emerges automatically from the block structure; no eigen‑decomposition or manual cluster count is required.
After obtaining coarse clusters, the authors refine the segmentation with a final random‑walk label propagation. The binary cluster assignment matrix C is row‑normalized to Q₀, then iteratively updated as Qₜ₊₁ = (1‑γ) Q₀ + γ S Qₜ, where γ balances adherence to the seed clusters versus diffusion across the graph. Convergence yields Q*, and each pixel is assigned the label of the highest‑probability column.
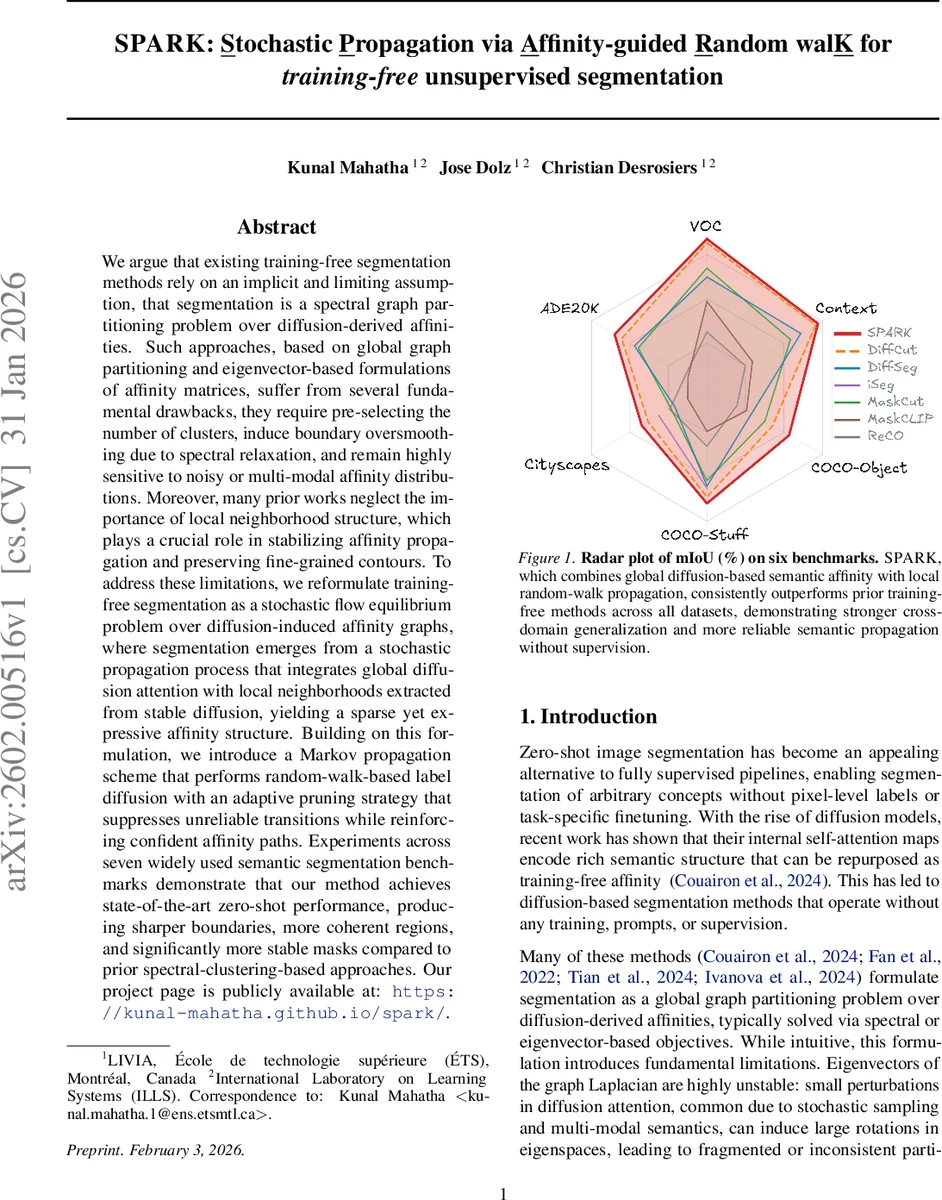
The experimental protocol spans seven widely used semantic segmentation benchmarks: Pascal VOC, Pascal Context, COCO‑Object, COCO‑Stuff‑27, Cityscapes, and ADE20K. Baselines include a broad set of recent training‑free and weakly supervised methods such as ReCO, MaskCLIP, MaskCut, iSeg, DiffSeg, DiffCut, and Seg4Diff, many of which rely on spectral partitioning of diffusion affinities. Evaluation uses mean Intersection‑over‑Union (mIoU) as the primary metric, supplemented by boundary F‑score and mask stability analyses.
Results demonstrate that SPARK consistently outperforms all baselines across datasets, achieving 2‑5 percentage‑point gains in mIoU. Qualitatively, SPARK produces sharper object boundaries, better preserves thin structures, and yields more stable masks under varying diffusion noise. Ablation studies reveal that moderate values of β (≈ 0.6‑0.8) best balance semantic reach and spatial precision, ℓ = 2 and r ≈ 2.5 provide effective expansion and inflation, τ = 1e‑4 efficiently prunes spurious links, and γ ≈ 0.7 offers a good trade‑off between seed fidelity and diffusion.
In summary, the paper contributes a novel, fully unsupervised segmentation framework that (i) integrates global semantic cues with local geometric context, (ii) replaces fragile eigen‑vector based partitioning with a robust stochastic flow that automatically determines the number of segments, and (iii) introduces adaptive pruning to mitigate noise. By doing so, SPARK sets a new state‑of‑the‑art for training‑free segmentation, offering a practical solution for zero‑shot semantic understanding without any model fine‑tuning, prompts, or handcrafted hyper‑parameters for cluster count.
Comments & Academic Discussion
Loading comments...
Leave a Comment