Lantern: A Minimalist Robotic Object Platform
Robotic objects are simple actuated systems that subtly blend into human environments. We design and introduce Lantern, a minimalist robotic object platform to enable building simple robotic artifacts. We conducted in-depth design and engineering iterations of Lantern’s mechatronic architecture to meet specific design goals while maintaining a low build cost (~40 USD). As an extendable, open-source platform, Lantern aims to enable exploration of a range of HRI scenarios by leveraging human tendency to assign social meaning to simple forms. To evaluate Lantern’s potential for HRI, we conducted a series of explorations: 1) a co-design workshop, 2) a sensory room case study, 3) distribution to external HRI labs, 4) integration into a graduate-level HRI course, and 5) public exhibitions with older adults and children. Our findings show that Lantern effectively evokes engagement, can support versatile applications ranging from emotion regulation to focused work, and serves as a viable platform for lowering barriers to HRI as a field.
💡 Research Summary
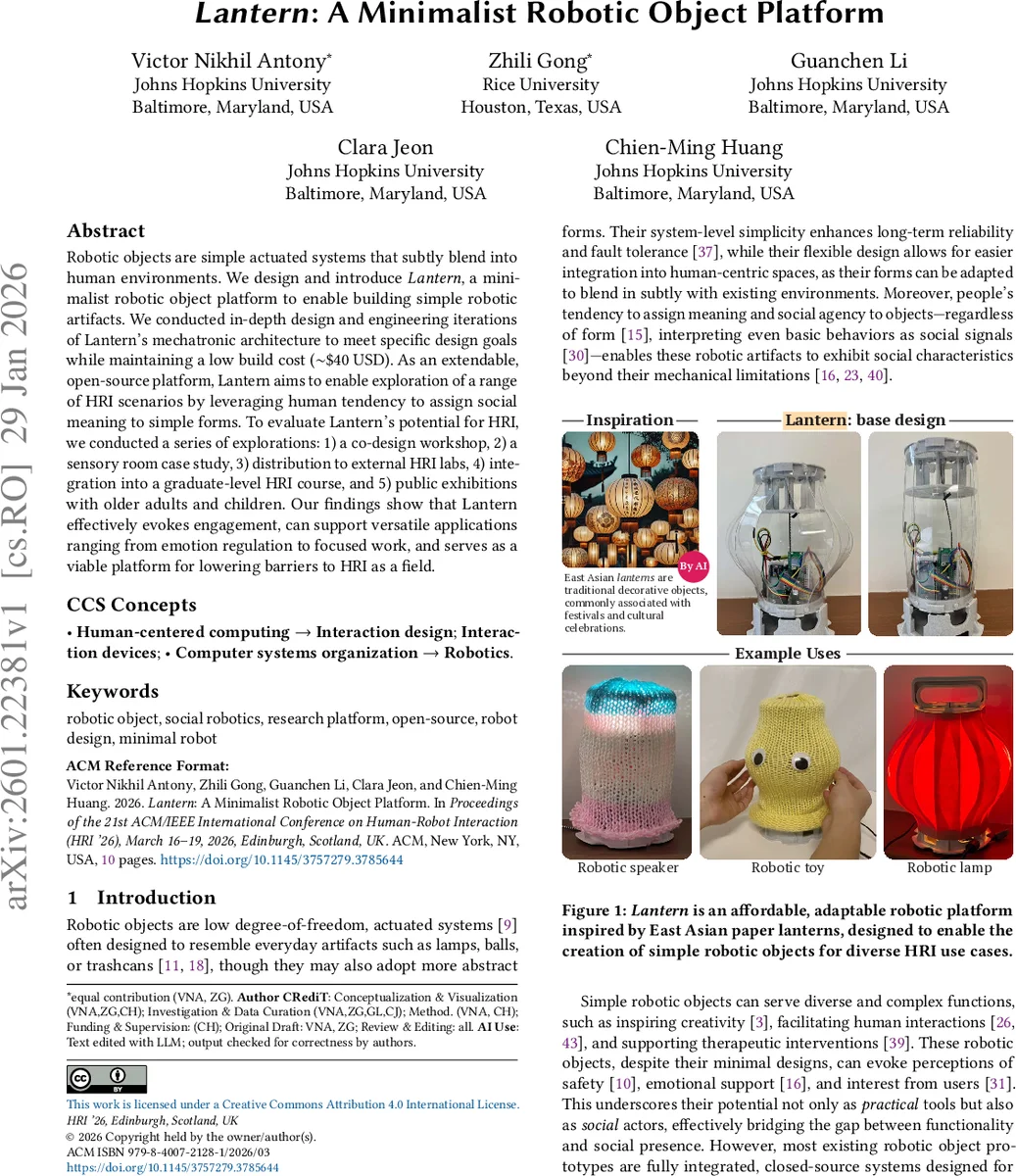
The paper introduces Lantern, a low‑cost (~ $40), open‑source, minimalist robotic object platform designed to lower barriers to research and education in Human‑Robot Interaction (HRI). Inspired by traditional East Asian paper lanterns, Lantern is a handheld, deformable device that provides both kinesthetic and vibrotactile haptic feedback through a single‑degree‑of‑freedom (1 DOF) servo‑driven belt‑pulley mechanism and an auxiliary vibration motor. The mechanical design evolved through three major iterations: an initial six‑rod guide system that suffered from tilting, a belt‑guide redesign that added a base housing, and a final version that incorporates structural braces, a snap‑on stand, and a PET‑G sliced shell. The shell’s 1 mm thickness and 18 slices allow controlled radial expansion when the internal actuator compresses the device, creating a tactile “breathing” motion reminiscent of a floating lantern.
Electrically, Lantern uses off‑the‑shelf components: a Raspberry Pi Pico W as the main controller (providing Wi‑Fi, GPIO, and ROS compatibility), a 25 kg·cm hobby servo, a mini‑vibration motor driven by a two‑channel motor driver, and a simple power system that accepts 7.5 V DC (via battery pack or AC adapter) and steps it down to 5.5 V and 3.3 V for the high‑voltage and low‑voltage subsystems respectively. This architecture keeps the bill of materials low while leaving many GPIO pins free for future extensions.
Software support is offered through two complementary stacks. The Lantern SDK, written in MicroPython, supplies a high‑level API for actuation, sensing, scheduling, and Wi‑Fi remote control, enabling rapid prototyping without ROS expertise. For researchers already embedded in the ROS ecosystem, a microROS bridge runs on the Pico W, exposing Lantern as a microROS node that can be orchestrated by a full ROS 2 application on a host computer. This dual‑approach ensures that both novice makers and advanced HRI labs can integrate Lantern into their workflows.
To evaluate Lantern’s utility, the authors conducted five distinct studies:
- Co‑design Workshop – Designers and HRI researchers collaboratively generated interaction concepts, highlighting that Lantern’s affordability and ease of assembly stimulate creative exploration.
- Sensory‑Room Case Study – Integrated as a multimodal light‑sound‑vibration device, Lantern contributed to reduced stress and increased focus among participants, measured via self‑report and physiological indicators.
- Distribution to External Labs – Four independent HRI groups received kits, assembled them within 30 minutes, and employed Lantern in varied experiments (robotic pet, collaborative cueing, therapeutic aid), all reporting positive experiences and minimal technical hurdles.
- Graduate‑Level HRI Course Integration – As a semester‑long hands‑on project, Lantern enabled students to prototype diverse applications (emotional regulation, attention‑guiding lamp, interactive art), markedly expanding the range of student projects compared to prior years.
- Public Exhibitions with Older Adults and Children – In museum‑style settings, participants interacted with Lantern‑based artifacts; the familiar lantern form factor and tactile feedback elicited high engagement, curiosity, and a sense of safety across age groups.
Across these evaluations, Lantern consistently evoked engagement, proved adaptable to multiple modalities (light, sound, touch), and demonstrated that a minimalist, inexpensive platform can support both basic HRI research and more elaborate user‑centered designs.
The authors acknowledge limitations: the current design offers only a single DOF and a limited sensor suite (touch and optional IMU), battery life varies with interaction intensity, and scaling production would require quality‑control processes for the laser‑cut PET‑G shells and 3D‑printed parts. Future work aims to add additional actuators for multi‑DOF motion, modular sensor packs (e.g., proximity, temperature), and cloud‑based behavior authoring tools to further lower the entry threshold for non‑technical designers.
In conclusion, Lantern represents a compelling contribution to the HRI community: an open‑source, hand‑holdable robot that merges simple mechanical actuation with rich haptic feedback at a price point accessible to most research labs, educators, and hobbyists. Its successful deployment across workshops, classrooms, labs, and public spaces validates its potential to democratize HRI experimentation and to inspire new forms of socially meaningful robotic objects.
Comments & Academic Discussion
Loading comments...
Leave a Comment