ReloPush-BOSS: Optimization-guided Nonmonotone Rearrangement Planning for a Car-like Robot Pusher
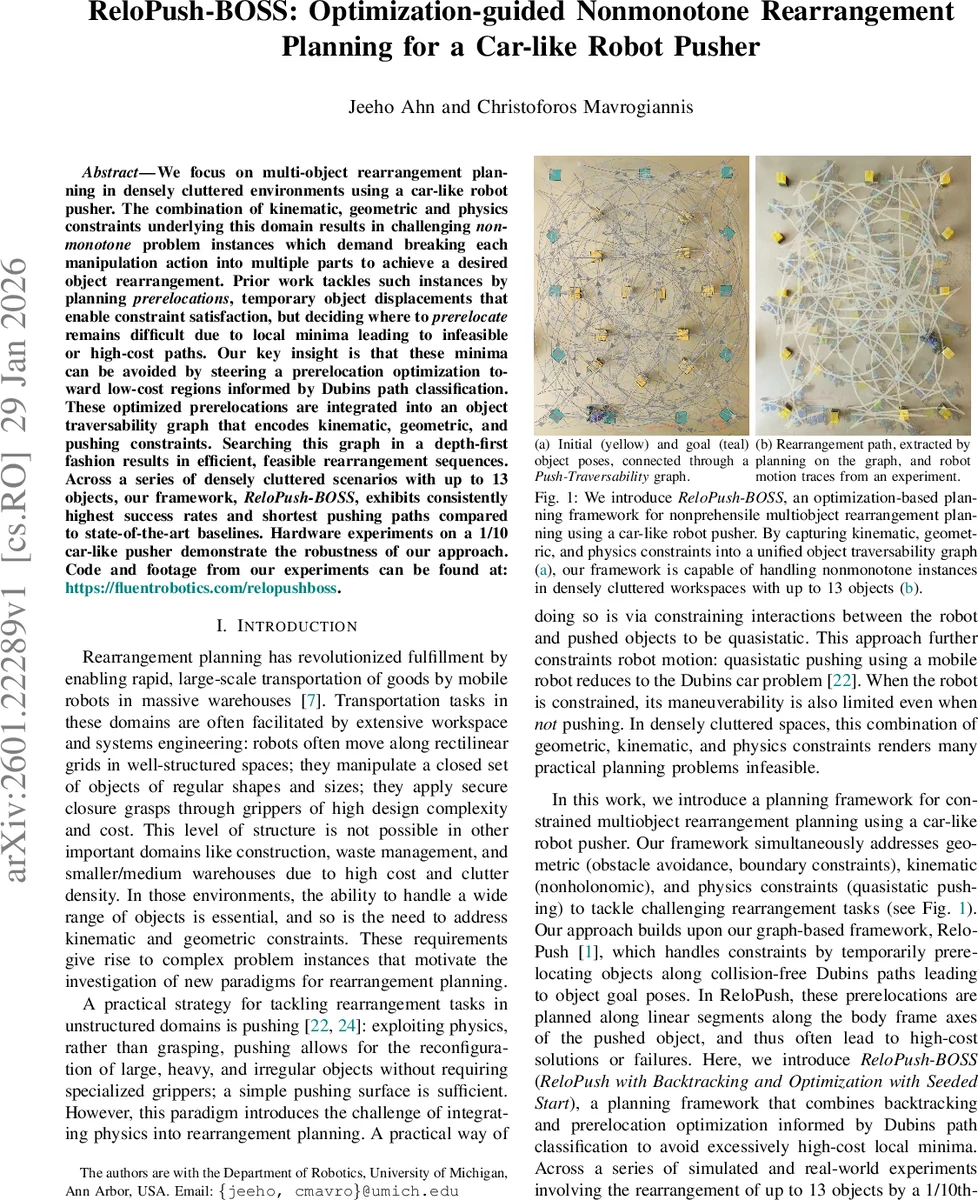
We focus on multi-object rearrangement planning in densely cluttered environments using a car-like robot pusher. The combination of kinematic, geometric and physics constraints underlying this domain results in challenging nonmonotone problem instances which demand breaking each manipulation action into multiple parts to achieve a desired object rearrangement. Prior work tackles such instances by planning prerelocations, temporary object displacements that enable constraint satisfaction, but deciding where to prerelocate remains difficult due to local minima leading to infeasible or high-cost paths. Our key insight is that these minima can be avoided by steering a prerelocation optimization toward low-cost regions informed by Dubins path classification. These optimized prerelocations are integrated into an object traversability graph that encodes kinematic, geometric, and pushing constraints. Searching this graph in a depth-first fashion results in efficient, feasible rearrangement sequences. Across a series of densely cluttered scenarios with up to 13 objects, our framework, ReloPush-BOSS, exhibits consistently highest success rates and shortest pushing paths compared to state-of-the-art baselines. Hardware experiments on a 1/10 car-like pusher demonstrate the robustness of our approach. Code and footage from our experiments can be found at: https://fluentrobotics.com/relopushboss.
💡 Research Summary
The paper tackles the challenging problem of multi‑object rearrangement in densely cluttered 2‑D workspaces using a car‑like robot that can only push objects. Unlike most prior work that assumes monotone tasks (each object moved at most once) or relies on grasping, the authors focus on non‑monotone scenarios where objects must be moved several times and intermediate “prerelocations” are required to unblock subsequent pushes. Their previous system, ReloPush, generated prerelocations by sampling straight‑line displacements along the object’s pushing axes. This approach often got trapped in high‑cost local minima, especially when the Dubins‑car motion constraints of the robot made direct collision‑free paths impossible.
ReloPush‑BOSS introduces two major innovations to overcome these limitations. First, it formulates prerelocation selection as a continuous optimization problem. Given an object’s start pose o_s and goal pose o_g, the algorithm searches for an intermediate pose o_pre that splits the overall movement into two Dubins‑car segments (o_s → o_pre and o_pre → o_g). The objective is to minimize the sum of the two Dubins path lengths while respecting the robot’s minimum turning radius and collision constraints. Crucially, the optimizer is warm‑started with “seeded” initial guesses derived from Dubins‑path classification (the six canonical patterns: LSL, LSR, RSL, RSR, LRL, RLR). By aligning the seed with the geometric relationship between start, goal, and obstacles, the optimizer avoids the high‑cost basins that plagued the previous sampling method, leading to substantially shorter push trajectories (≈30 % reduction in experiments).
Second, the authors embed these optimized prerelocations into a Push‑Traversability (PT) graph. Each vertex corresponds to a feasible pushing pose on an object (defined by a contact point and outward normal) at either its initial or goal configuration. Directed edges are added when a collision‑free Dubins path exists between two pushing poses, with edge weights equal to the path length. When a direct edge is infeasible, the optimizer supplies a prerelocation vertex that bridges the gap, effectively adding a new edge pair to the graph. The PT graph thus captures both kinematic (non‑holonomic Dubins) and geometric (collision avoidance) constraints in a unified structure.
Planning proceeds with a depth‑first search (DFS) over object rearrangement sequences, guided by a priority queue that orders candidate object moves by their associated push‑transfer cost. At each depth the algorithm checks whether the robot can reach the required pushing pose from its current location; if not, it backtracks and tries the next candidate. This cost‑ordered DFS with backtracking replaces the greedy failure mode of the original ReloPush, dramatically improving robustness without incurring the combinatorial explosion of a full global sequence optimization. When a candidate path is blocked by another object, a simple “Obstacle Relocation” primitive is invoked: the blocking object is displaced along a straight‑line push (aligned with its contact normal) to clear the way. This heuristic keeps the inner search fast while still handling inter‑object dependencies.
The authors evaluate ReloPush‑BOSS in both simulation and on a 1/10‑scale car‑like robot (a racecar platform). Scenarios involve 5 to 13 rectangular objects placed in highly congested arrangements, requiring multiple prerelocations per object. Compared against the original ReloPush and a recent non‑monotone push planner, ReloPush‑BOSS achieves near‑100 % success rates, reduces average total push distance by up to 45 %, and solves instances that the baselines cannot. Real‑world experiments confirm that the optimized prerelocations respect the robot’s turning radius and avoid collisions even with sensor noise and actuation errors.
The paper’s contributions are: (1) a seeded, continuous optimization framework for low‑cost prerelocations; (2) integration of these prerelocations into a PT graph that jointly encodes kinematic, geometric, and quasi‑static physics constraints; (3) a cost‑ordered DFS with backtracking that efficiently searches feasible rearrangement sequences; and (4) extensive empirical validation demonstrating superior scalability and robustness.
Limitations include the focus on 2‑D planar environments, the assumption of quasistatic pushing (no dynamic effects), and reliance on labeled goal poses. Extending the approach to 3‑D workspaces, handling variable friction or elastic contacts, and addressing unlabeled or partially specified goals are promising directions for future work. Additionally, reducing the computational overhead of the continuous optimizer (e.g., via learning‑based seed generation) could further improve real‑time applicability.
Comments & Academic Discussion
Loading comments...
Leave a Comment