User Guide to UVIT Data Reduction
This document provides a user guide for reducing UVIT data using CCDLAB. While CCDLAB offers a straightforward data reduction work-flow, users may encounter certain challenges that require additional guidance. This guide provides instructions by addressing common issues related to key processing steps, including WCS solutions and VIS drift tracking.
💡 Research Summary
The paper presents a practical, step‑by‑step user guide for reducing Ultra‑Violet Imaging Telescope (UVIT) data with the CCDLAB software package. While CCDLAB already provides a relatively straightforward reduction pipeline, the authors identify several recurring problems that users encounter and offer detailed troubleshooting instructions to resolve them.
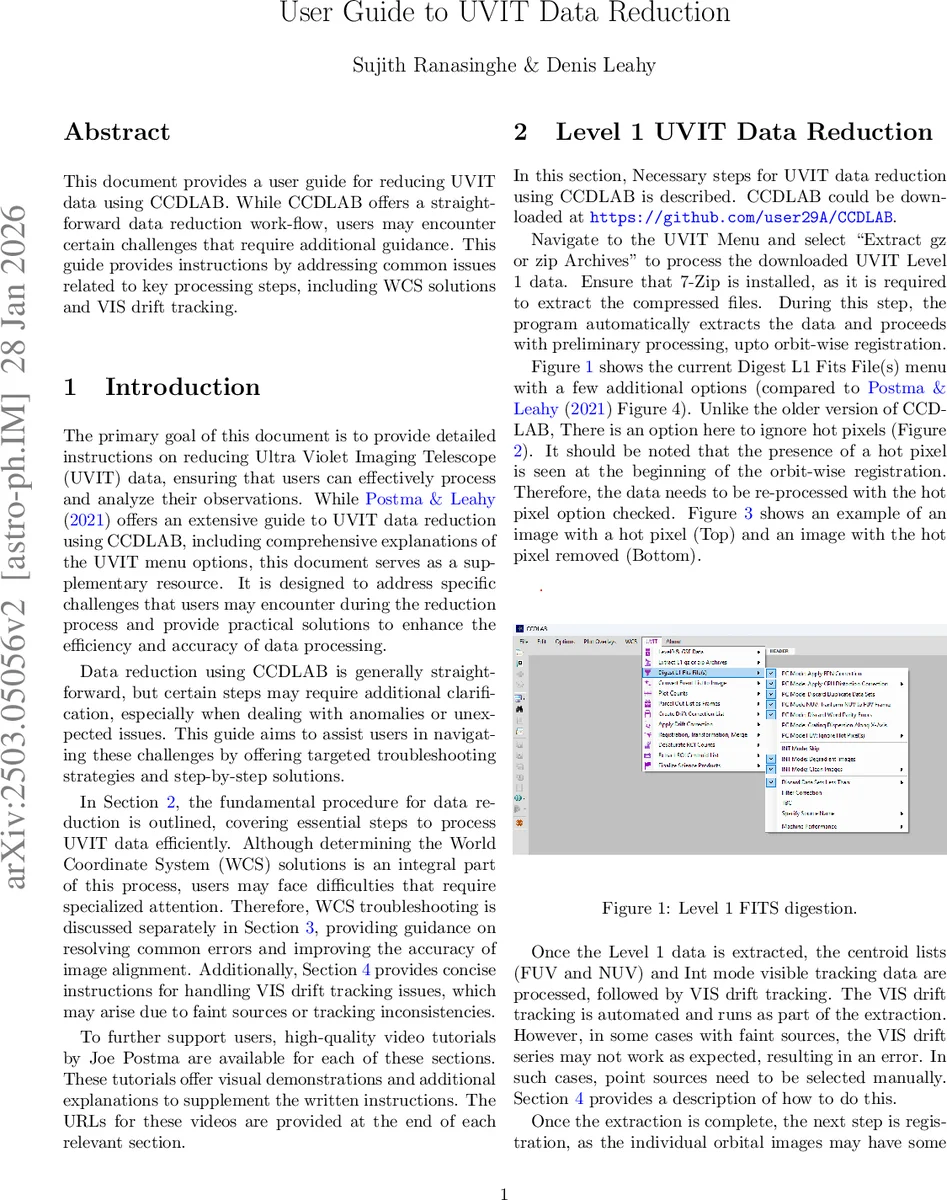
The workflow begins with downloading CCDLAB from GitHub and extracting the Level 1 (L1) UVIT data archives using 7‑Zip. The “Extract gz or zip Archives” menu automatically performs preliminary processing up to orbit‑wise registration. A critical early decision is whether to enable the “Ignore hot pixel” option; leaving it off can cause spurious bright spots during the initial registration, so the guide advises re‑processing with the option checked and verifying the removal of hot pixels by comparing before/after images.
VIS (visible) drift tracking is performed automatically as part of the extraction, but faint VIS fields often trigger an error. In such cases the user must switch to manual point‑source selection: bright stars are identified in each orbit, their positions are entered, and the resulting x‑ and y‑drift series are inspected. The guide explains how to distinguish correctly tracked sources (green/yellow paths) from failed ones and how to redo the tracking manually.
Image registration proceeds via the “General Registration” command. The first selected point becomes the anchor; subsequent points are marked with red boxes and can be moved or rotated until all frames align. Because registration is iterative, users are encouraged to repeat the process until the red boxes line up consistently across all orbits. After satisfactory alignment, the “Merge Centroid List” function combines the individual orbit images, and an optional “Create Drift Correction List → Optimize Point Source ROI” step refines source profiles.
World Coordinate System (WCS) solutions are derived using the Gaia DR3 catalogue. The default CCDLAB values for CV AL1 (RA) and CV AL2 (Dec) must be replaced with RA PNT and DEC PNT, after which the “AstraCarta” button downloads the catalogue as a FITS file. Clicking “Solve” runs the solver with a default stopping criterion of 6 and 75 catalogue points. If no solution is found, the guide recommends increasing the number of catalogue points (by 25–50) and, if necessary, raising the stopping criterion. The authors warn that using too few refinement sources can produce multiple competing solutions; therefore both parameters should be increased together to obtain a unique, accurate WCS. Once a solution is secured, the image may be de‑rotated via the “De‑rotate Loaded Images via WCS” menu. As a last resort, users can manually input coordinates of known stars, though this is difficult in crowded fields.
When multiple L1 observations of the same target exist, the guide outlines a merging strategy: extract each L1 zip into its own sub‑folder, run the registration steps for each, then perform a manual “General Registration” on the parent folder to correct any inter‑observation shifts. The “Merge Multiple L1 Obs. IDs” and subsequent “Merge Centroid List” commands combine all orbits into a single dataset, after which the standard WCS correction, de‑rotation, and finalization steps are applied.
Throughout the document, the authors provide screen captures and direct links to YouTube tutorials that demonstrate each procedure (e.g., hot‑pixel handling, WCS solving, manual VIS tracking, merging observations). They also discuss common pitfalls such as hot‑pixel artifacts, VIS drift failures, ambiguous WCS solutions, and image shift errors during merging, offering concrete remedies for each.
In summary, this guide supplements the existing literature on UVIT data reduction by delivering a concise, problem‑focused manual that enables researchers to process UVIT observations efficiently and with higher scientific fidelity, leveraging CCDLAB’s capabilities while mitigating its known limitations.
Comments & Academic Discussion
Loading comments...
Leave a Comment