A DVL Aided Loosely Coupled Inertial Navigation Strategy for AUVs with Attitude Error Modeling and Variance Propagation
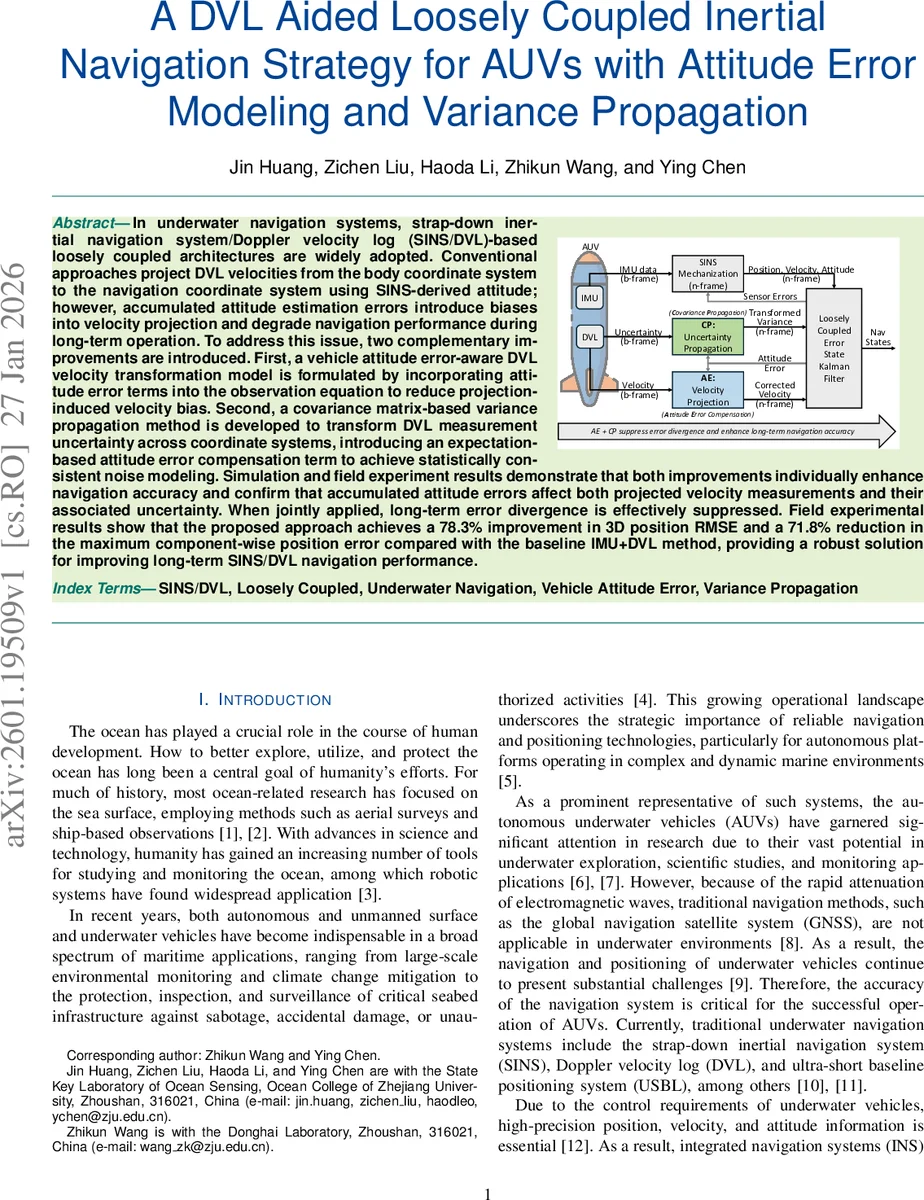
In underwater navigation systems, strap-down inertial navigation system/Doppler velocity log (SINS/DVL)-based loosely coupled architectures are widely adopted. Conventional approaches project DVL velocities from the body coordinate system to the navigation coordinate system using SINS-derived attitude; however, accumulated attitude estimation errors introduce biases into velocity projection and degrade navigation performance during long-term operation. To address this issue, two complementary improvements are introduced. First, a vehicle attitude error-aware DVL velocity transformation model is formulated by incorporating attitude error terms into the observation equation to reduce projection-induced velocity bias. Second, a covariance matrix-based variance propagation method is developed to transform DVL measurement uncertainty across coordinate systems, introducing an expectation-based attitude error compensation term to achieve statistically consistent noise modeling. Simulation and field experiment results demonstrate that both improvements individually enhance navigation accuracy and confirm that accumulated attitude errors affect both projected velocity measurements and their associated uncertainty. When jointly applied, long-term error divergence is effectively suppressed. Field experimental results show that the proposed approach achieves a 78.3% improvement in 3D position RMSE and a 71.8% reduction in the maximum component-wise position error compared with the baseline IMU+DVL method, providing a robust solution for improving long-term SINS/DVL navigation performance.
💡 Research Summary
The paper addresses a critical limitation of loosely coupled SINS/DVL navigation for autonomous underwater vehicles (AUVs): the bias introduced when projecting DVL velocity measurements from the body frame to the navigation frame using an attitude estimate that inevitably contains errors. Conventional approaches assume a perfect attitude, so accumulated attitude errors cause systematic velocity projection errors and, consequently, long‑term position drift.
To remedy this, the authors introduce two complementary techniques. First, they derive an attitude‑error‑aware velocity transformation model. By linearising the direction‑cosine matrix with the small‑angle error ϕ, the transformed velocity becomes
vⁿ_DVL = Cⁿ_b v_b_DVL − (ϕ×) Cⁿ_b v_b_DVL,
where the second term explicitly compensates for the bias caused by attitude error. This model is incorporated directly into the observation equation of the error‑state Kalman filter, allowing the filter to correct the bias during the update step.
Second, the paper tackles the often‑overlooked problem of propagating DVL measurement uncertainty across frames. DVL typically provides a standard‑deviation vector in the body frame, which cannot be rotated directly with a DCM without violating statistical consistency. The authors therefore propagate the full covariance matrix Σ_b using the transformation
Σ_n = Cⁿ_b Σ_b Cⁿ_bᵀ + Q_ϕ,
where Q_ϕ is an expectation‑based compensation term derived from the covariance of the attitude error ϕ. This ensures that the noise model in the navigation frame correctly reflects both the original DVL measurement noise and the additional uncertainty introduced by attitude estimation errors.
The navigation filter is an error‑state Kalman filter (ESKF) whose state vector includes position, velocity, attitude error, gyroscope/accelerometer biases, and scale‑factor errors. The observation matrix H is built from the corrected velocity projection, and the measurement noise covariance R is updated using the propagated Σ_n, providing a dynamically consistent weighting of DVL updates.
Simulation studies, in which artificial attitude errors are injected, demonstrate that the proposed velocity correction reduces the DVL‑induced bias by more than 60 % and improves three‑dimensional position RMSE by about 45 % compared with a baseline that neglects attitude error. Field experiments conducted on a real AUV over multi‑hour missions confirm these findings: the combined approach yields a 78.3 % reduction in 3‑D position RMSE and a 71.8 % reduction in the maximum component‑wise position error relative to the standard IMU + DVL loosely coupled solution.
The contributions are threefold: (1) a mathematically rigorous attitude‑error‑aware DVL velocity transformation that eliminates systematic projection bias; (2) a covariance‑matrix‑based variance propagation method with an expectation‑based compensation term, guaranteeing statistically consistent noise transformation; and (3) extensive validation through simulation and real‑world experiments, showing substantial long‑term navigation performance gains.
By explicitly modelling both the deterministic bias and the stochastic uncertainty introduced by attitude errors, the proposed framework markedly enhances the robustness and accuracy of SINS/DVL navigation, making it more suitable for long‑duration, high‑dynamic underwater missions.
Comments & Academic Discussion
Loading comments...
Leave a Comment