GTA: Generative Traffic Agents for Simulating Realistic Mobility Behavior
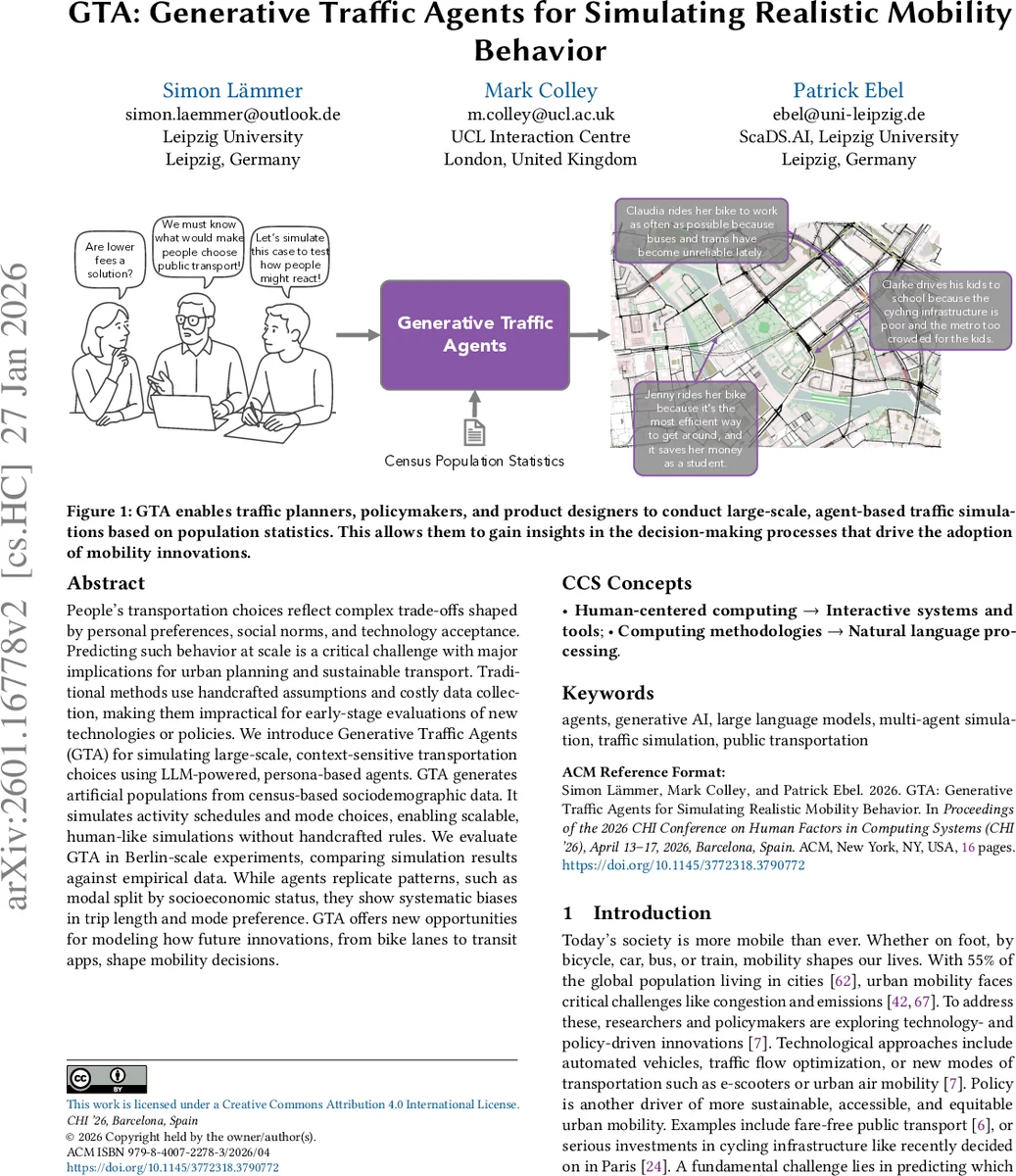
People’s transportation choices reflect complex trade-offs shaped by personal preferences, social norms, and technology acceptance. Predicting such behavior at scale is a critical challenge with major implications for urban planning and sustainable transport. Traditional methods use handcrafted assumptions and costly data collection, making them impractical for early-stage evaluations of new technologies or policies. We introduce Generative Traffic Agents (GTA) for simulating large-scale, context-sensitive transportation choices using LLM-powered, persona-based agents. GTA generates artificial populations from census-based sociodemographic data. It simulates activity schedules and mode choices, enabling scalable, human-like simulations without handcrafted rules. We evaluate GTA in Berlin-scale experiments, comparing simulation results against empirical data. While agents replicate patterns, such as modal split by socioeconomic status, they show systematic biases in trip length and mode preference. GTA offers new opportunities for modeling how future innovations, from bike lanes to transit apps, shape mobility decisions.
💡 Research Summary
The paper introduces Generative Traffic Agents (GT A), a novel framework that leverages large language models (LLMs) to create persona‑driven agents for large‑scale, context‑sensitive mobility simulation. Traditional travel demand models rely on handcrafted utility functions and survey‑derived activity schedules, which are costly to develop and inflexible for early‑stage exploration of new technologies or policies. GT A addresses these limitations by grounding agents in census‑aligned micro‑data and then prompting an LLM to generate a natural‑language persona that encapsulates demographic attributes, preferences, goals, and constraints.
The system consists of three tightly coupled modules. The Profile Module samples sociodemographic attributes from official population statistics and uses them as inputs to an LLM, which produces a textual description of each synthetic individual. The Planning Module maps these personas onto a realistic urban environment: points of interest are extracted from OpenStreetMap (OSM), public‑transport schedules from GTFS, and multimodal travel options are enumerated. Guided by prompts that embed network‑derived travel times, distances, and mode availability, the LLM constructs a full‑day activity schedule and selects a transport mode for each trip. Finally, the Action Module translates the schedule into concrete routes using OpenTripPlanner and runs a microscopic traffic simulation in SUMO, where a dynamic user equilibrium adjusts flows to reflect congestion and capacity constraints.
The authors evaluate GT A on a Berlin‑scale scenario comprising roughly one million synthetic residents. They calibrate the synthetic population to the “Mobility in Germany 2017” survey and compare simulation outputs to official traffic counts and travel‑survey indicators. Results show that GT A successfully reproduces broad socioeconomic patterns: higher‑income groups favor private cars, while lower‑income groups rely more on public transport and active modes. However, systematic deviations emerge. Average trip lengths are underestimated by about 12 %, and the share of cycling and walking trips is overestimated by 8‑15 % relative to observed data. The authors attribute these biases to the LLM’s strong emphasis on time minimization and to insufficient quantitative encoding of infrastructure quality (e.g., bike‑lane density) in the prompts.
Key contributions include: (1) an automated pipeline that fuses census data with LLM‑generated personas, eliminating the need for costly user studies; (2) a context‑aware decision‑making process that grounds mode choice in real network constraints rather than abstract utility functions; (3) an open‑source implementation that integrates with widely used tools (OSM, GTFS, SUMO) and provides reproducible Berlin scenario data. Limitations are acknowledged: results are sensitive to prompt engineering, computational costs rise with population size, and there is currently no systematic bias‑correction mechanism.
Future work proposes enriching the cost model with multimodal travel‑time and monetary cost functions, incorporating reinforcement‑learning loops for agents to adapt based on simulation feedback, and applying GT A to “what‑if” policy analyses such as fare‑free transit, expanded bike‑lane networks, or the introduction of e‑scooters and autonomous vehicles. By delivering a rapid, low‑cost, yet empirically grounded simulation tool, GT A promises to empower urban planners, designers, and researchers to explore a wide array of mobility innovations before costly real‑world deployments.
Comments & Academic Discussion
Loading comments...
Leave a Comment