Simultaneous Source Separation, Synchronization, Localization and Mapping for 6G Systems
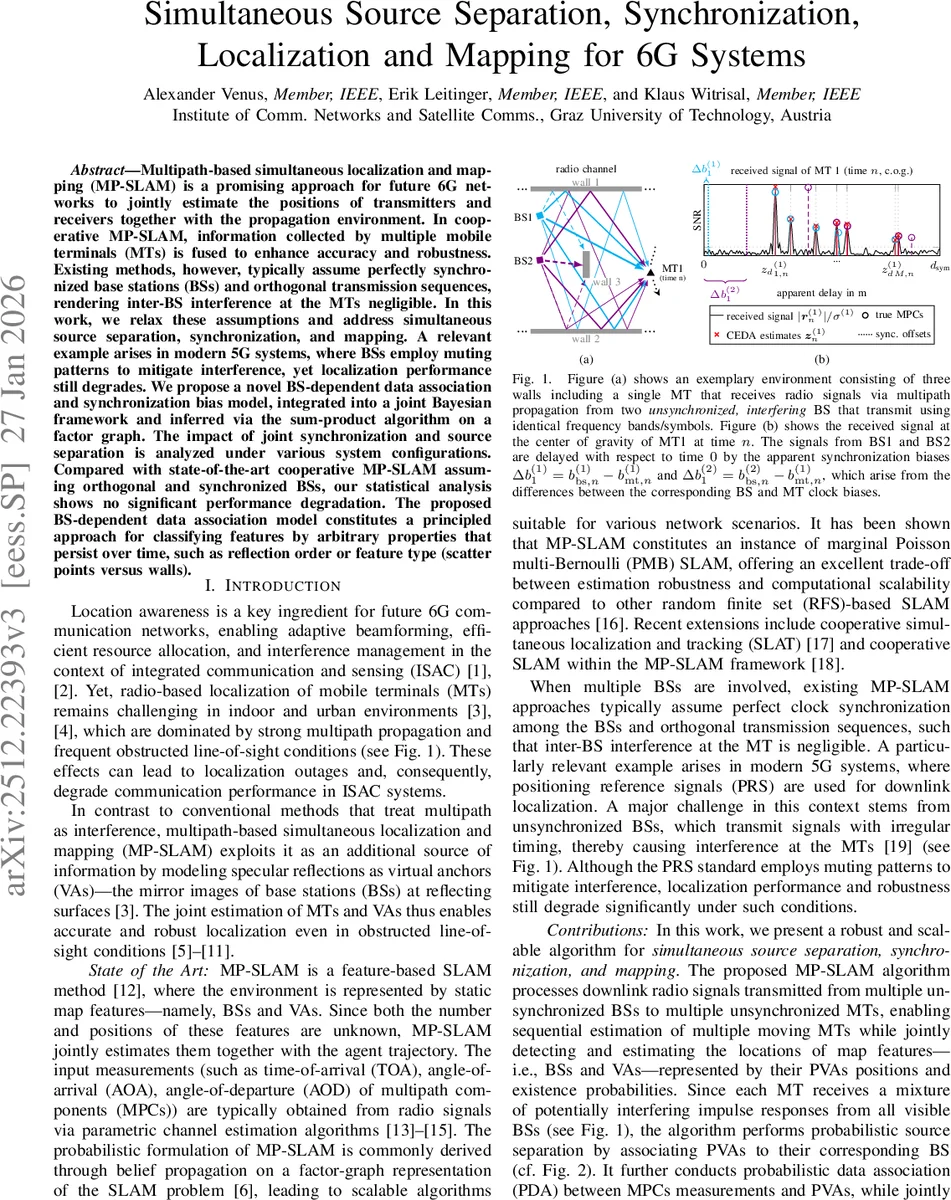
Multipath-based simultaneous localization and mapping (MP-SLAM) is a promising approach for future 6G networks to jointly estimate the positions of transmitters and receivers together with the propagation environment. In cooperative MP-SLAM, information collected by multiple mobile-terminals (MTs) is fused to enhance accuracy and robustness. Existing methods, however, typically assume perfectly synchronized base stations (BSs) and orthogonal transmission sequences, rendering inter-BS interference at the MT negligible. In this work, we relax these assumptions and address simultaneous source separation, synchronization, and mapping. A relevant example arises in modern 5G systems, where BSs employ muting patterns to mitigate interference, yet localization performance still degrades. We propose a novel BS-dependent data association and synchronization bias model, integrated into a joint Bayesian framework and inferred via the sum-product algorithm on a factor graph. The impact of joint synchronization and source separation is analyzed under various system configurations. Compared with state-of-the-art cooperative MP-SLAM assuming orthogonal and synchronized BSs, our statistical analysis shows no significant performance degradation. The proposed BS-dependent data association model constitutes a principled approach for classifying features by arbitrary properties that persist over time, such as reflection order or feature type (scatter points versus walls).
💡 Research Summary
The paper addresses a critical limitation of existing multipath‑based simultaneous localization and mapping (MP‑SLAM) techniques for future 6G networks: the assumption of perfectly synchronized base stations (BSs) transmitting orthogonal pilot sequences. In real‑world 5G and upcoming 6G deployments, BSs often operate with unsynchronized clocks and reuse the same frequency resources, leading to inter‑BS interference at mobile terminals (MTs). This interference degrades the performance of positioning reference signals (PRS) and hampers the robustness of cooperative SLAM solutions.
To overcome these challenges, the authors propose a comprehensive Bayesian framework that jointly performs source separation, clock bias estimation, and SLAM. The key innovations are:
-
BS‑Dependent Data Association Model – Each BS is associated with a set of potential virtual anchors (PVAs) that represent unknown reflecting surfaces. A binary existence variable is introduced for each PVA, allowing the algorithm to treat both existing and non‑existing anchors probabilistically.
-
Synchronization Bias Modeling – Clock offsets are modeled as differences between BS‑side and MT‑side biases (Δb_j,i = b_j^bs – b_i^mt). These biases appear as additive terms in the distance measurement likelihood, enabling simultaneous estimation of position and timing errors.
-
Factor‑Graph Representation and Sum‑Product Inference – The joint posterior over MT states, PVA states, and clock biases is factorized into a graphical model. Message passing (sum‑product) on this factor graph yields iterative updates for all variables, integrating source separation (assigning each measured multipath component to a BS) and probabilistic data association (linking measurements to PVAs).
-
Poisson Modeling of New Virtual Anchors – The appearance of previously unseen reflecting surfaces is modeled as a Poisson process with mean μ_n. This allows the number of PVAs to grow over time, reflecting the dynamic discovery of environmental features.
The algorithm proceeds in four stages at each discrete time step: (i) channel estimation and detection (CEDA) extracts multipath component (MPC) parameters (delay, AoA, AoD, SNR) from the received MIMO signal; (ii) new PVAs are instantiated for measurements that have not been explained yet, with uniform prior over the possible originating BS; (iii) a joint source‑separation and data‑association step updates the belief over which BS generated each MPC and which PVA it corresponds to, while simultaneously refining the clock‑bias estimates; (iv) the MT state (position, velocity, orientation) and BS bias posteriors are updated using MMSE estimates derived from the messages.
Simulation studies are conducted in a realistic indoor scenario with two to three BSs and multiple moving MTs. The BSs transmit identical pilot symbols and employ muting patterns similar to 5G PRS, creating overlapping interference. The proposed method is compared against a state‑of‑the‑art cooperative MP‑SLAM that assumes orthogonal, synchronized BSs. Results show that, despite the additional uncertainty introduced by unsynchronized clocks and interference, the proposed joint estimator achieves comparable root‑mean‑square positioning error and virtual‑anchor localization accuracy. The performance gap is statistically insignificant, confirming that the BS‑dependent data association and synchronization bias model effectively mitigate the adverse effects of interference.
The contributions of the paper can be summarized as follows:
- Introduction of a probabilistic source‑separation mechanism that works under non‑orthogonal, interfering BS transmissions.
- A unified Bayesian treatment of clock‑bias estimation and SLAM, enabling consistent fusion of measurements across all BS‑MT links.
- Derivation of a factor‑graph‑based sum‑product algorithm that scales with the number of MTs and BSs while preserving computational tractability.
- Extensive performance analysis demonstrating that the proposed approach does not suffer from degradation relative to idealized synchronized‑BS baselines.
Future research directions suggested include extending the model to handle double‑bounce and higher‑order reflections, incorporating mobile BS platforms such as drones, and developing real‑time implementations through message compression or hardware acceleration. Moreover, the BS‑dependent data association framework could be leveraged to classify features by persistent attributes (e.g., reflection order, wall versus scatterer), opening avenues for richer environmental mapping and more sophisticated integrated communication‑sensing services in 6G networks.
Comments & Academic Discussion
Loading comments...
Leave a Comment