CoCoPlan: Adaptive Coordination and Communication for Multi-robot Systems in Dynamic and Unknown Environments
Multi-robot systems can greatly enhance efficiency through coordination and collaboration, yet in practice, full-time communication is rarely available and interactions are constrained to close-range exchanges. Existing methods either maintain all-time connectivity, rely on fixed schedules, or adopt pairwise protocols, but none adapt effectively to dynamic spatio-temporal task distributions under limited communication, resulting in suboptimal coordination. To address this gap, we propose CoCoPlan, a unified framework that co-optimizes collaborative task planning and team-wise intermittent communication. Our approach integrates a branch-and-bound architecture that jointly encodes task assignments and communication events, an adaptive objective function that balances task efficiency against communication latency, and a communication event optimization module that strategically determines when, where and how the global connectivity should be re-established. Extensive experiments demonstrate that it outperforms state-of-the-art methods by achieving a 22.4% higher task completion rate, reducing communication overhead by 58.6%, and improving the scalability by supporting up to 100 robots in dynamic environments. Hardware experiments include the complex 2D office environment and large-scale 3D disaster-response scenario.
💡 Research Summary
CoCoPlan addresses the critical challenge of coordinating large teams of robots in environments where continuous, high‑bandwidth communication cannot be guaranteed. The authors observe that existing approaches either enforce all‑time connectivity, rely on fixed communication schedules, or use pairwise intermittent protocols, none of which can adapt to the unpredictable spatio‑temporal distribution of tasks that emerge online. To fill this gap, the paper proposes a unified framework that jointly optimizes collaborative task planning and team‑wide intermittent communication events.
The problem is formally defined for a set of N heterogeneous robots operating in a bounded workspace. Each robot has a position, sensor range, a set of primitive actions, and a velocity bound. Tasks appear online and are characterized by a target region, required execution duration, number of agents, and specific actions. Temporal relations among tasks (precedence, mutual exclusion, concurrency) are also specified. Communication is modeled using a realistic wireless quality function that accounts for free‑space path loss, obstacle attenuation, and a minimum quality threshold δ. A time‑varying graph G(t) captures the connectivity at any instant, and a “team‑wise intermittent communication” event occurs when all robots simultaneously reach designated positions at a common time, guaranteeing that G(t_c) is connected.
The overall objective is to maximize the long‑run average task completion rate η(J) = lim_{T→∞} N_T(J)/T, subject to satisfying all temporal constraints and ensuring global connectivity at each communication event. Directly solving this infinite‑horizon problem is intractable, so the authors introduce an adaptive objective that maximizes the task completion rate per unit time over the interval between the current time t and the next communication time t_c. This surrogate objective serves as a local approximation of η(J) while penalizing communication latency.
CoCoPlan’s algorithmic core consists of three tightly coupled components:
-
Adaptive Coordination Framework – At each communication event, the current set of detected tasks Ω_t is used to formulate a mixed integer optimization problem that maximizes the adaptive objective. The decision variables include task assignments to robots, the ordering of tasks within each robot’s plan, and the timing/placement of the next communication event.
-
Branch‑and‑Bound (BnB) Joint Planner – The mixed‑integer problem is solved using a BnB search tree where each node ν encodes a partial collective plan J_ν (task sequences for all robots interleaved with communication events). For each node, a lower bound LB_ν (pessimistic estimate) and an upper bound UB_ν (optimistic estimate) are computed via dedicated “LowBound” and “UpBound” procedures that respect temporal constraints and connectivity feasibility. Nodes whose UB_ν ≤ current best LB are pruned, dramatically reducing the search space. The search proceeds in a best‑first manner, always expanding the node with the highest UB, and terminates when a pre‑allocated computation budget T₁ expires.
-
Iterative Communication‑Event Optimizer – Given a candidate task allocation, the optimizer searches for the most beneficial communication time and location. It first generates a set of feasible meeting points based on the robots’ predicted trajectories and a pre‑computed communication‑quality map (derived from the wireless model). Then it evaluates each candidate’s impact on the adaptive objective, selecting the pair (t_c, p_c) that yields the greatest increase in task‑per‑time while guaranteeing that the connectivity graph at t_c is connected. This module is invoked repeatedly within the BnB loop, allowing the planner to adapt to newly discovered tasks in real time.
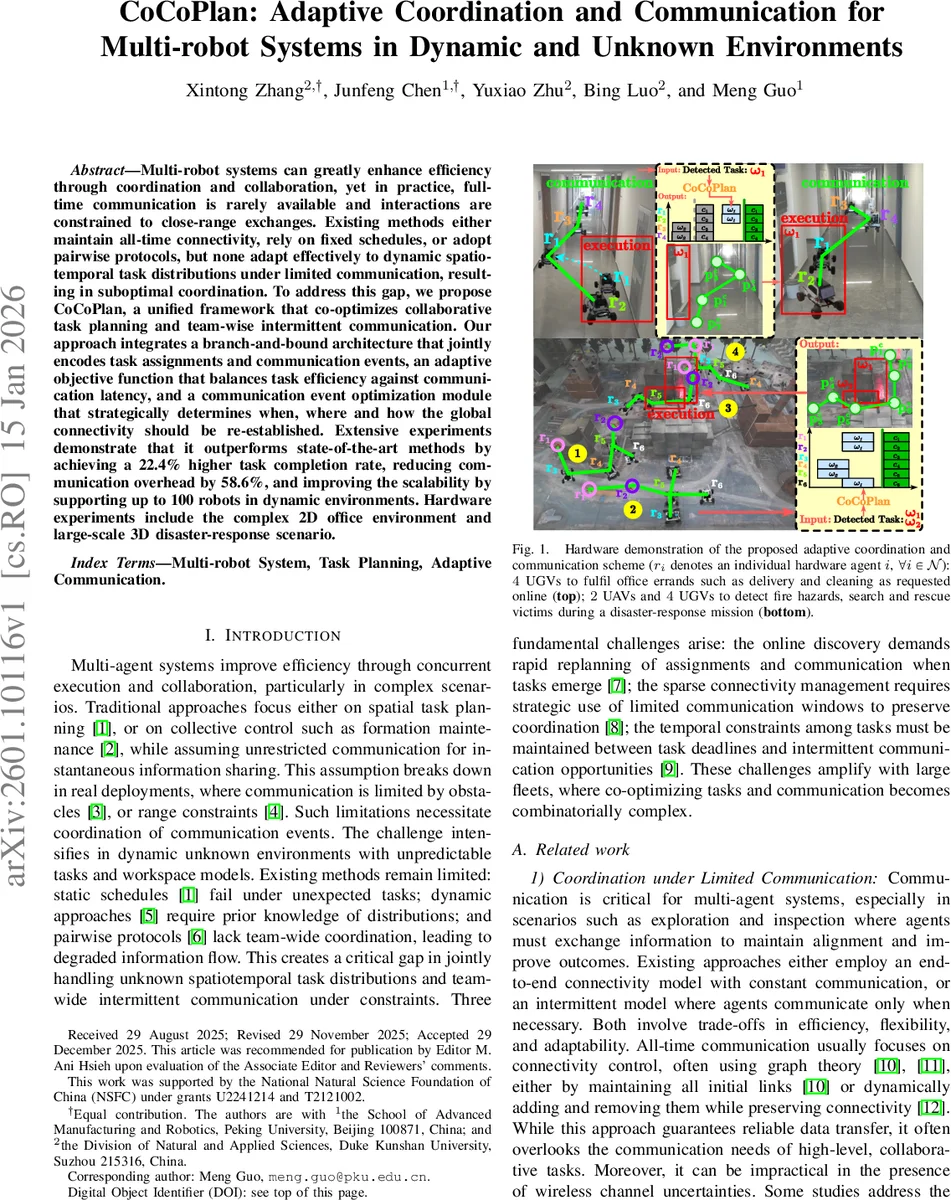
The authors validate CoCoPlan through extensive simulation and hardware experiments. Two benchmark scenarios are used: (i) a complex 2‑D office environment with 10 ground robots performing delivery and cleaning tasks, and (ii) a large‑scale 3‑D disaster‑response scenario involving 2 UAVs and 4 UGVs tasked with fire detection, victim search, and rescue. Baselines include (a) a centralized planner that maintains all‑time connectivity, (b) a fixed‑interval intermittent communication scheduler, and (c) a pairwise intermittent protocol. Results show that CoCoPlan achieves a 22.4 % higher task completion rate, reduces communication overhead by 58.6 %, and scales to teams of up to 100 robots without a loss of performance. The communication‑quality map enables the system to select re‑connection points that avoid obstacles and signal shadowing, thereby minimizing synchronization delays.
Key contributions are: (1) a general online co‑design of task planning and team‑wise intermittent communication, ensuring timely information propagation while preserving task efficiency; (2) an adaptive objective function robust to unknown task distributions and dynamic environments; (3) a rigorous BnB formulation with provable bounds and a practical iterative communication optimizer; and (4) comprehensive validation in both simulated and real‑world settings.
The paper also discusses limitations. The worst‑case complexity of BnB remains exponential, which may become prohibitive for ultra‑large teams (thousands of robots) or extremely tight real‑time constraints. The wireless model assumes only free‑space loss and obstacle attenuation, neglecting multipath fading and stochastic interference that occur in real deployments. Future work is suggested in three directions: (a) learning‑based heuristics to tighten upper bounds and accelerate BnB convergence; (b) richer channel models that capture fading and dynamic interference; and (c) distributed BnB or meta‑heuristic hybrids that enable scalable, decentralized planning while preserving the guarantees of the centralized approach.
Overall, CoCoPlan represents a significant step toward practical, adaptive coordination of multi‑robot teams operating under realistic communication constraints, bridging the gap between theoretical planning algorithms and the messy, dynamic environments encountered in real‑world applications.
Comments & Academic Discussion
Loading comments...
Leave a Comment