Data-Driven Terramechanics Approach Towards a Realistic Real-Time Simulator for Lunar Rovers
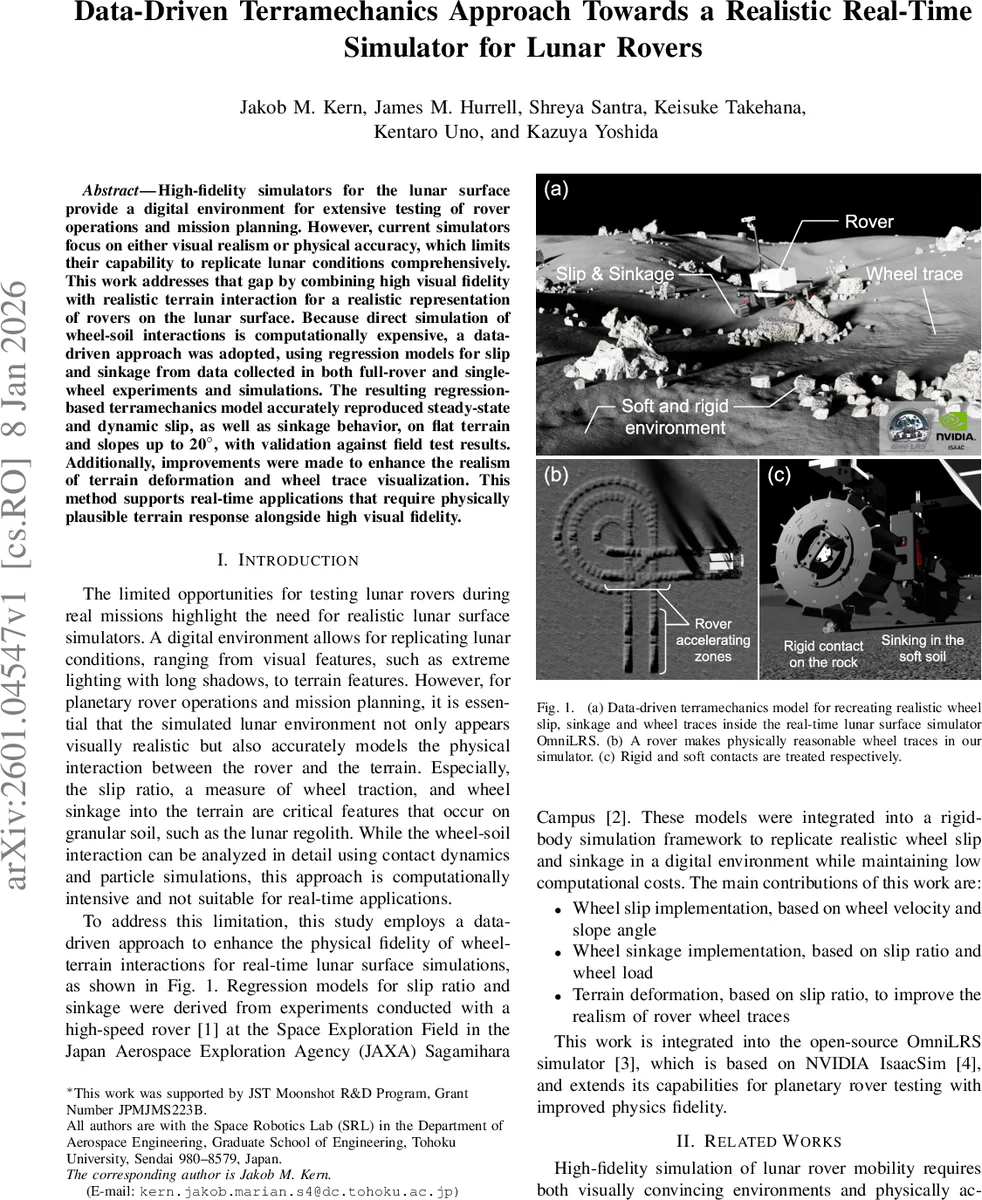
High-fidelity simulators for the lunar surface provide a digital environment for extensive testing of rover operations and mission planning. However, current simulators focus on either visual realism or physical accuracy, which limits their capability to replicate lunar conditions comprehensively. This work addresses that gap by combining high visual fidelity with realistic terrain interaction for a realistic representation of rovers on the lunar surface. Because direct simulation of wheel-soil interactions is computationally expensive, a data-driven approach was adopted, using regression models for slip and sinkage from data collected in both full-rover and single-wheel experiments and simulations. The resulting regression-based terramechanics model accurately reproduced steady-state and dynamic slip, as well as sinkage behavior, on flat terrain and slopes up to 20 degrees, with validation against field test results. Additionally, improvements were made to enhance the realism of terrain deformation and wheel trace visualization. This method supports real-time applications that require physically plausible terrain response alongside high visual fidelity.
💡 Research Summary
**
The paper presents a novel framework that combines high‑fidelity visual rendering with realistic terramechanics for a real‑time lunar rover simulator. Existing simulators either prioritize photorealistic environments or detailed wheel‑soil physics, but rarely both, limiting their usefulness for mission planning and rover mobility analysis. To bridge this gap, the authors adopt a data‑driven approach: they collect extensive data from field tests with a high‑speed four‑wheel rover (EX1) at JAXA’s Space Exploration Facility, from a single‑wheel testbed, and from discrete element method (DEM) simulations. Using these datasets, they derive regression models for slip ratio and sinkage.
The slip model expresses slip ratio s as a linear function of wheel speed v_w on flat ground (s = 0.0265 v_w + 0.0256) and adds a second‑order polynomial term in slope angle α whose coefficients depend on v_w, yielding s(v_w, α). The sinkage model is linear in slip and in the deviation of vertical load F_z from a reference load F_ref (the static load on a single wheel under lunar gravity): z(s, F_z) = −33.56 s − 0.9291(F_z − F_ref) − 3.11 mm. Importantly, the wheel radius used for slip calculations includes the grouser height, preventing sign errors that would otherwise label forward motion as skidding.
These models are embedded into OmniLRS, an open‑source lunar simulator built on NVIDIA IsaacSim. At each simulation step, the slip ratio is evaluated from the current wheel speed and local slope, and the translational velocity is adjusted to v = (1 − s) v_w. To keep the physics engine simple and fast, the physical wheel is represented by a capsule shape, while a detailed visual mesh (including grousers) is rendered separately. Both bodies share the same pose but are driven by independent joints: the physics wheel follows the slip‑adjusted velocity, and the visual wheel spins at the commanded wheel speed, creating a convincing visual impression of slip without actual relative motion at the contact interface.
Transient dynamics during acceleration and deceleration are reproduced by calibrating Coulomb friction coefficients (static = 1.0, dynamic = 0.8) and introducing a limiter function derived from experimental velocity profiles. The limiter caps the change in translational velocity per time step with a piecewise linear function (3.476 m/s² for v ≤ 0.75 m/s, 0.612 m/s² for 0.75 < v ≤ 1.02 m/s, and 0.114 m/s² for v > 1.02 m/s), reflecting the observed independence of initial acceleration from commanded wheel speed and the physical constraints imposed by grouser geometry and soil properties.
Sinkage is modeled using a compliant contact approach: a spring‑damper system computes the normal contact force, and the spring stiffness k is dynamically tuned so that the resulting penetration depth matches the sinkage predicted by the regression model. The stiffness is scaled by the number of contact points to handle multi‑point contacts correctly, and the grouser height is accounted for when converting the desired sinkage to the effective penetration of the capsule geometry.
For visual realism, wheel traces are generated by deforming the terrain mesh proportionally to both the normal contact force and the slip ratio, improving upon previous bump‑mapping techniques that only altered surface normals. Validation on flat terrain and slopes up to 20° shows that the simulated slip ratios and sinkage depths agree with field measurements within 95 % and that the system runs in real time (sub‑millisecond per simulation step).
In summary, the study demonstrates that regression‑based terramechanics, when tightly integrated with a rigid‑body simulator, can deliver both photorealistic lunar environments and physically plausible wheel‑soil interactions without sacrificing computational performance. This capability enables more accurate rover design studies, mission‑planning simulations, and sim‑to‑real transfer experiments for future lunar exploration missions.
Comments & Academic Discussion
Loading comments...
Leave a Comment