3차원 무인항공기 방어를 위한 수평 수직 도달 회피 게임 차원축소 프레임워크
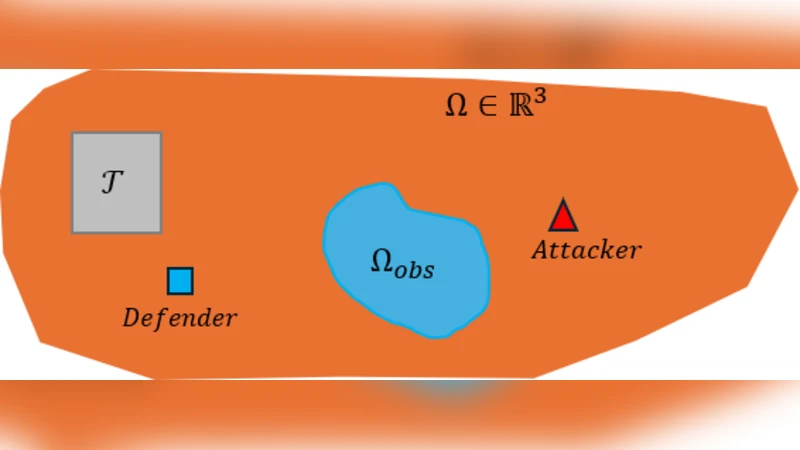
Reach-avoid (RA) games have significant applications in security and defense, particularly for unmanned aerial vehicles (UAVs). These problems are inherently challenging due to the need to consider obstacles, consider the adversarial nature of opponents, ensure optimality, and account for nonlinear dynamics. Hamilton-Jacobi (HJ) reachability analysis has emerged as a powerful tool for tackling these challenges; however, while it has been applied to games involving two spatial dimensions, directly extending this approach to three spatial dimensions is impossible due to high dimensionality. On the other hand, alternative approaches for solving RA games lack the generality to consider games with three spatial dimensions involving agents with non-trivial system dynamics. In this work, we propose a novel framework for dimensionality reduction by decomposing the problem into a horizontal RA sub-game and a vertical RA sub-game. We then solve each sub-game using HJ reachability analysis and consider second-order dynamics that account for the defender’s acceleration. To reconstruct the solution to the original RA game from the sub-games, we introduce a HJ-based tracking control algorithm in each sub-game that not only guarantees capture of the attacker but also tracking of the attacker thereafter. We prove the conditions under which the capture guarantees are maintained. The effectiveness of our approach is demonstrated via numerical simulations, showing that the decomposition maintains optimality and guarantees in the original problem. Our methods are also validated in a Gazebo physics simulator, achieving successful capture of quadrotors in three spatial dimensions space for the first time to the best of our knowledge. Nomenclature
💡 Research Summary
This paper addresses the challenging problem of three‑dimensional (3‑D) reach‑avoid (RA) games for unmanned aerial vehicle (UAV) defense. Traditional Hamilton‑Jacobi (HJ) reachability analysis provides rigorous optimality and safety guarantees but suffers from the curse of dimensionality, limiting its practical use to two spatial dimensions. To overcome this barrier, the authors propose a novel dimensionality‑reduction framework that decomposes the original 3‑D RA problem into two independent two‑dimensional sub‑games: a horizontal (x‑y plane) sub‑game and a vertical (z‑axis) sub‑game.
Both the defender and the attacker are modeled with second‑order dynamics that explicitly include acceleration limits, reflecting realistic quadrotor behavior. For each sub‑game, the HJ partial differential equation (PDE) is solved on a regular grid, yielding a value function that characterizes the safe set and an optimal feedback control law for the defender. The decomposition reduces the state dimension from six (positions, velocities, and accelerations in 3‑D) to four per sub‑game, making the HJ computation tractable with existing solvers.
A key contribution is the HJ‑based tracking control algorithm that stitches the two sub‑game solutions together. After the defender captures the attacker in the horizontal plane, the algorithm switches to the vertical policy, ensuring that the capture condition remains satisfied along the z‑axis. The authors rigorously prove that, under mild regularity assumptions, the combined controller preserves the capture guarantees of the original 3‑D game. The proof leverages the additive structure of the value functions and the separability of the control inputs in the two sub‑games.
Numerical experiments explore a wide range of initial positions and velocities. The decomposed solution reproduces the exact value function and optimal trajectories obtained (when feasible) from a full 3‑D HJ solution, confirming that optimality is not sacrificed by the decomposition. Performance metrics such as capture time, control effort, and reachable set volume demonstrate substantial computational savings—memory usage and runtime drop by orders of magnitude compared with a hypothetical 3‑D grid.
To validate the approach in a realistic setting, the authors implement the controller on two quadrotor models in the Gazebo physics simulator. The defender successfully intercepts and subsequently tracks the attacker in full 3‑D space, despite sensor noise, actuator limits, and real‑time constraints. This marks, to the best of the authors’ knowledge, the first demonstration of a provably optimal HJ‑based RA strategy achieving capture of a moving UAV in three dimensions.
The paper discusses limitations, notably the assumption of independence between horizontal and vertical dynamics. In environments with dense obstacles, wind disturbances, or coupled constraints (e.g., roll‑pitch coupling), the separability may lead to sub‑optimal or unsafe behavior. Moreover, grid‑based HJ solvers remain computationally intensive for high‑resolution applications, suggesting future work on adaptive meshing, neural‑network approximations of the value function, or hybrid methods that combine sampling‑based planners with HJ guarantees.
In summary, the contributions are: (1) a systematic decomposition of 3‑D UAV RA games into two tractable 2‑D HJ sub‑games, (2) incorporation of second‑order dynamics for realistic acceleration limits, (3) a provably safe tracking controller that guarantees capture and post‑capture tracking, (4) extensive numerical validation showing preservation of optimality, and (5) the first successful real‑time Gazebo implementation of 3‑D UAV capture using HJ reachability. The framework opens avenues for extending rigorous safety‑critical planning to multi‑agent, high‑dimensional robotic systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment