📝 Original Info
- Title: Attention in Motion: Secure Platooning via Transformer-based Misbehavior Detection
- ArXiv ID: 2512.15503
- Date: 2025-12-17
- Authors: Researchers from original ArXiv paper
📝 Abstract
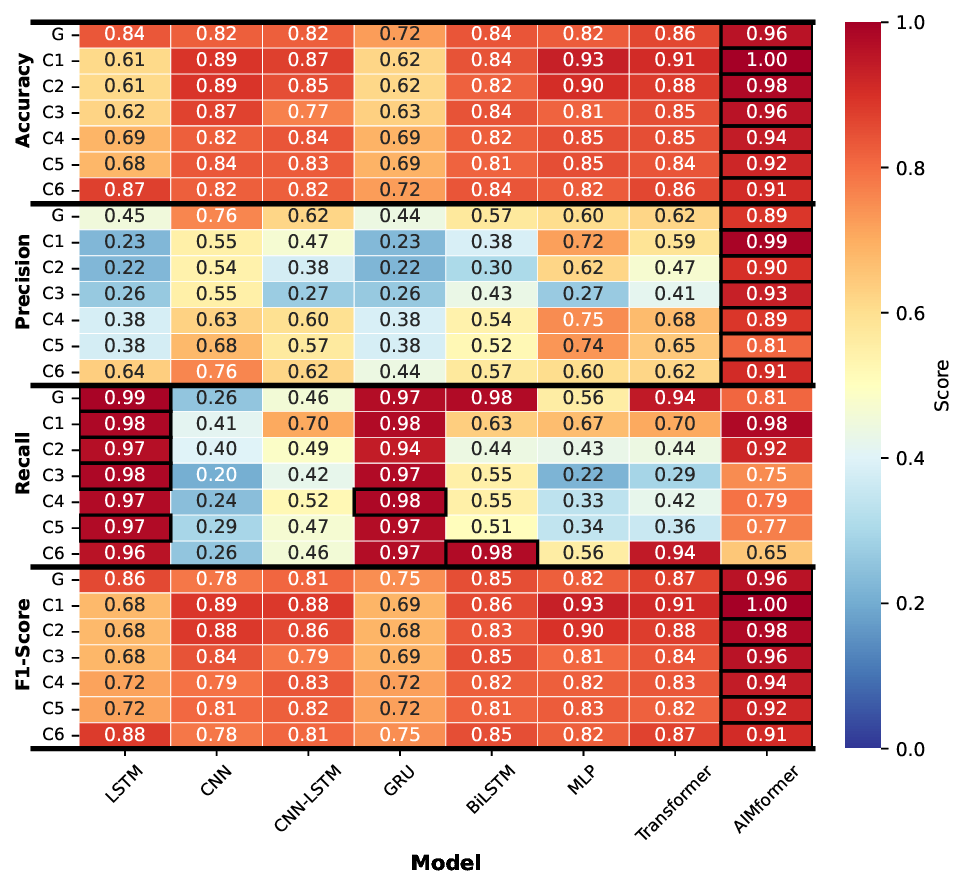
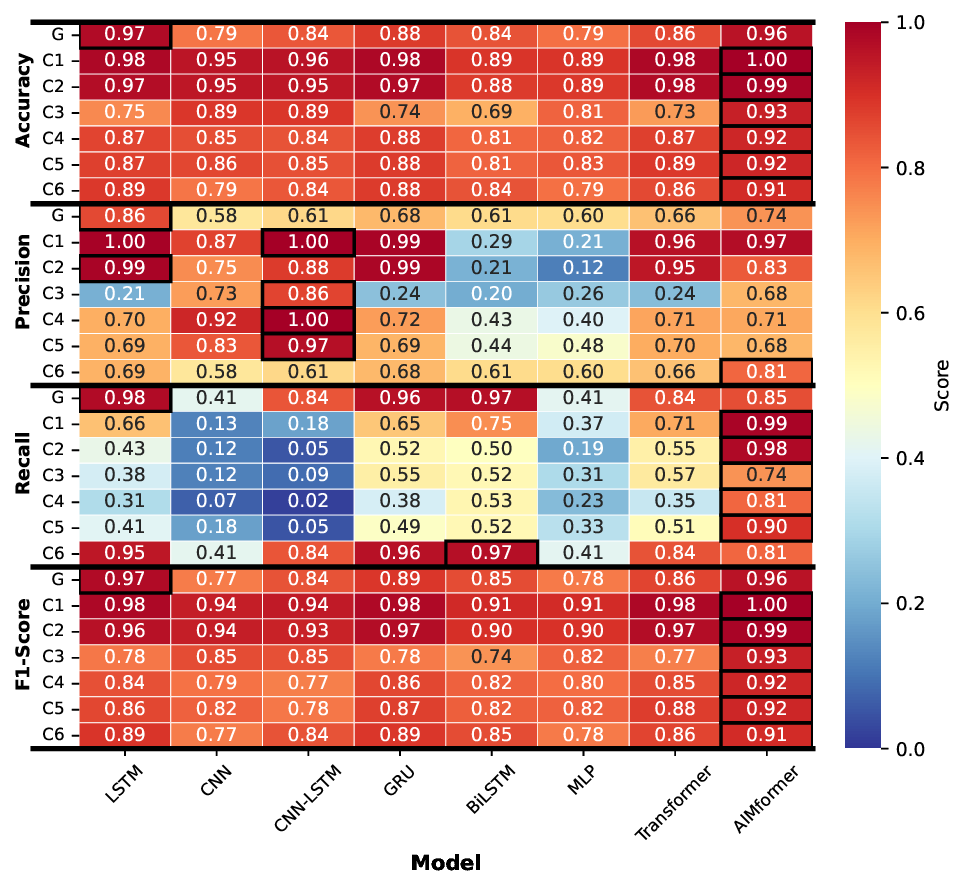
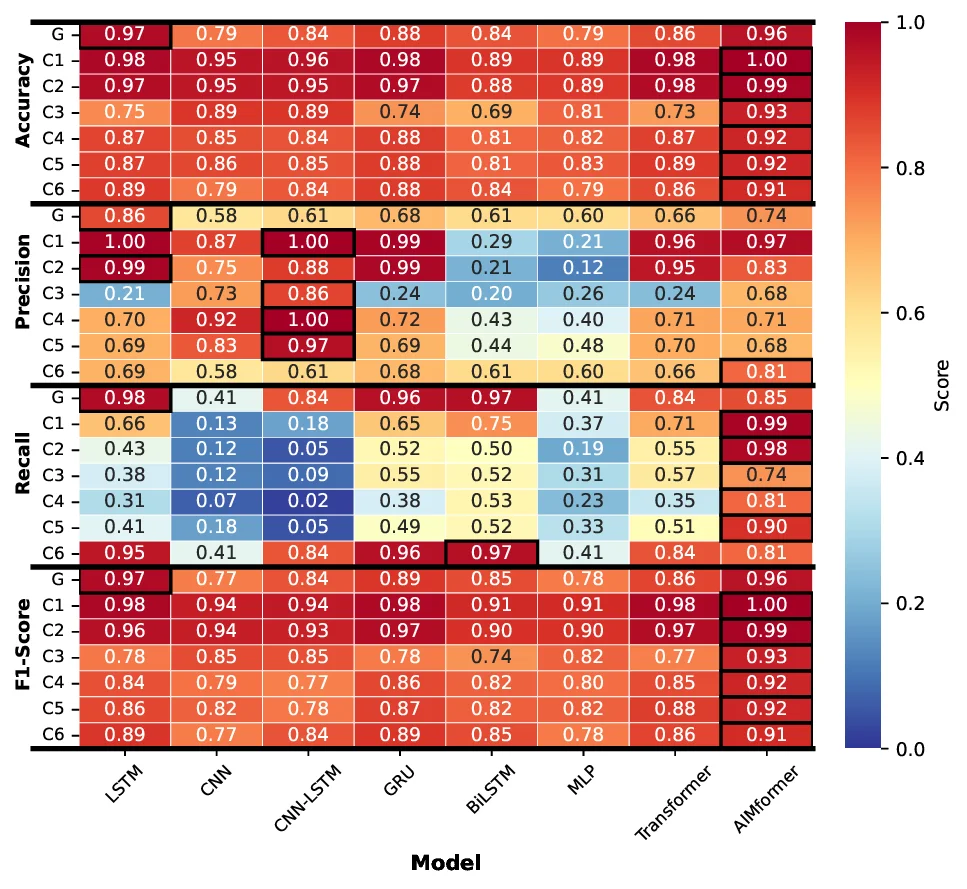
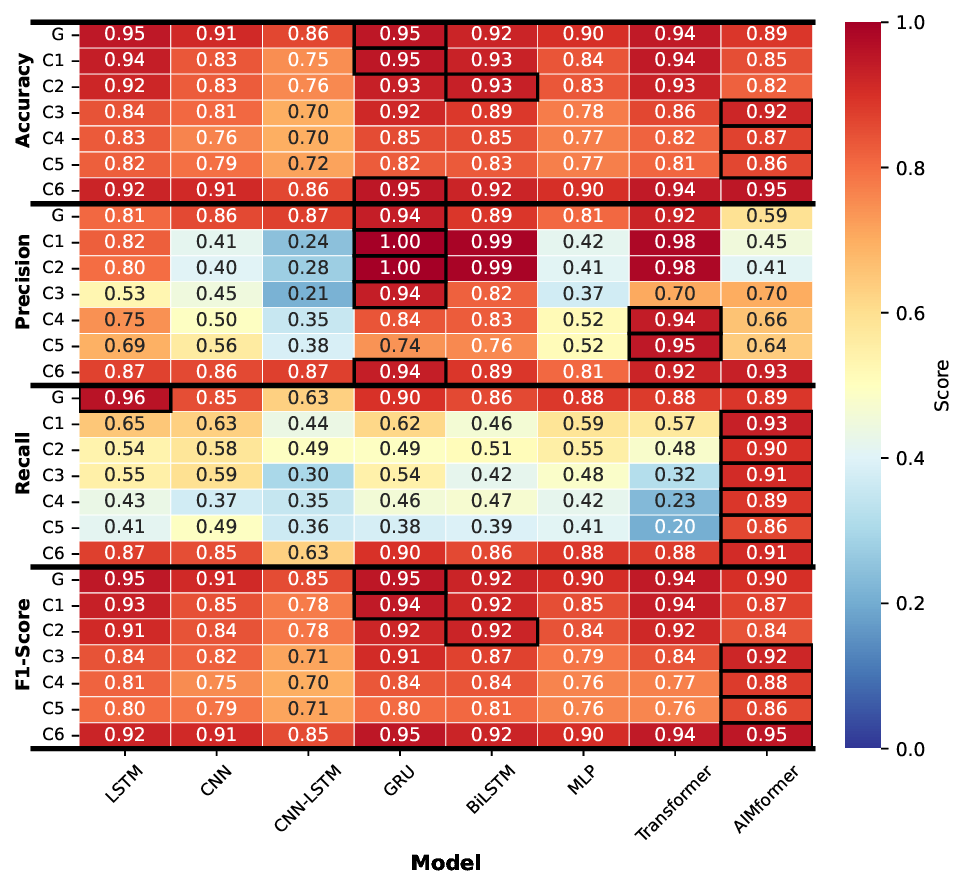
Vehicular platooning promises transformative improvements in transportation efficiency and safety through the coordination of multi-vehicle formations enabled by Vehicleto-Everything (V2X) communication. However, the distributed nature of platoon coordination creates security vulnerabilities, allowing authenticated vehicles to inject falsified kinematic data, compromise operational stability, and pose a threat to passenger safety. Traditional misbehaviour detection approaches, which rely on plausibility checks and statistical methods, suffer from high False Positive (FP) rates and cannot capture the complex temporal dependencies inherent in multi-vehicle coordination dynamics. We present Attention In Motion (AIMFORMER), a transformerbased framework specifically tailored for real-time misbehaviour detection in vehicular platoons with edge deployment capabilities. AIMFORMER leverages multi-head self-attention mechanisms to simultaneously capture intra-vehicle temporal dynamics and inter-vehicle spatial correlations. It incorporates global positional encoding with vehicle-specific temporal offsets to handle join/exit maneuvers. We propose a Precision-Focused Binary Cross-Entropy (PFBCE) loss function that penalizes FPs to meet the requirements of safety-critical vehicular systems. Extensive evaluation across 4 platoon controllers, multiple attack vectors, and diverse mobility scenarios demonstrates superior performance (≥ 0.93) compared to state-of-the-art baseline architectures. A comprehensive deployment analysis utilizing TensorFlow Lite (TFLite), Open Neural Network Exchange (ONNX), and TensorRT achieves sub-millisecond inference latency, making it suitable for real-time operation on resource-constrained edge platforms. Hence, validating AIMFORMER is viable for both invehicle and roadside infrastructure deployment.
💡 Deep Analysis
Deep Dive into Attention in Motion: Secure Platooning via Transformer-based Misbehavior Detection.
Vehicular platooning promises transformative improvements in transportation efficiency and safety through the coordination of multi-vehicle formations enabled by Vehicleto-Everything (V2X) communication. However, the distributed nature of platoon coordination creates security vulnerabilities, allowing authenticated vehicles to inject falsified kinematic data, compromise operational stability, and pose a threat to passenger safety. Traditional misbehaviour detection approaches, which rely on plausibility checks and statistical methods, suffer from high False Positive (FP) rates and cannot capture the complex temporal dependencies inherent in multi-vehicle coordination dynamics. We present Attention In Motion (AIMFORMER), a transformerbased framework specifically tailored for real-time misbehaviour detection in vehicular platoons with edge deployment capabilities. AIMFORMER leverages multi-head self-attention mechanisms to simultaneously capture intra-vehicle temporal dynamics and inter-
📄 Full Content
IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS
1
Attention in Motion: Secure Platooning via Transformer-based
Misbehavior Detection
Konstantinos Kalogiannis*
, Student Member, IEEE, Ahmed Mohamed Hussain*
, Member, IEEE, Hexu Li
,
and Panos Papadimitratos
, Fellow, IEEE
Abstract—Vehicular platooning promises transformative im-
provements in transportation efficiency and safety through the
coordination of multi-vehicle formations enabled by Vehicle-
to-Everything (V2X) communication. However, the distributed
nature of platoon coordination creates security vulnerabilities,
allowing authenticated vehicles to inject falsified kinematic data,
compromise operational stability, and pose a threat to passenger
safety. Traditional misbehaviour detection approaches, which rely
on plausibility checks and statistical methods, suffer from high
False Positive (FP) rates and cannot capture the complex tempo-
ral dependencies inherent in multi-vehicle coordination dynamics.
We present Attention In Motion (AIMFORMER), a transformer-
based framework specifically tailored for real-time misbehaviour
detection in vehicular platoons with edge deployment capabilities.
AIMFORMER leverages multi-head self-attention mechanisms
to simultaneously capture intra-vehicle temporal dynamics and
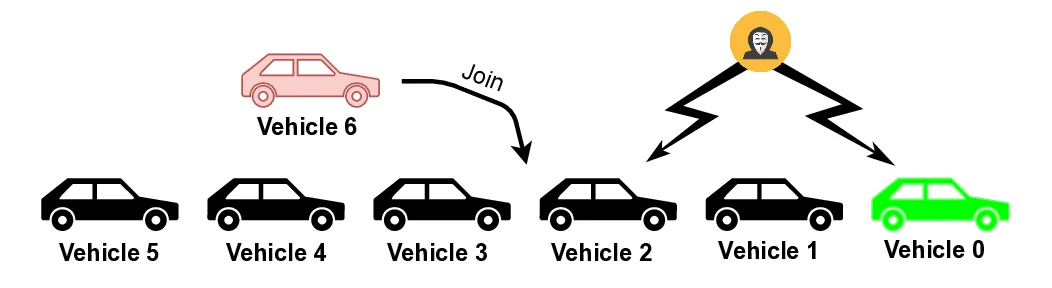
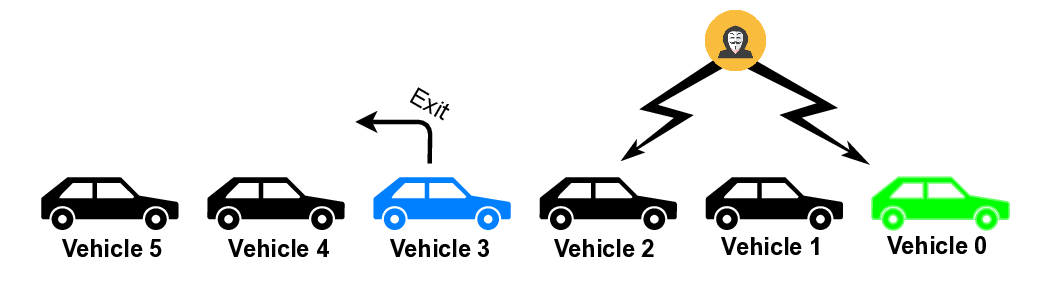
inter-vehicle spatial correlations. It incorporates global posi-
tional encoding with vehicle-specific temporal offsets to handle
join/exit maneuvers. We propose a Precision-Focused Binary
Cross-Entropy (PFBCE) loss function that penalizes FPs to meet
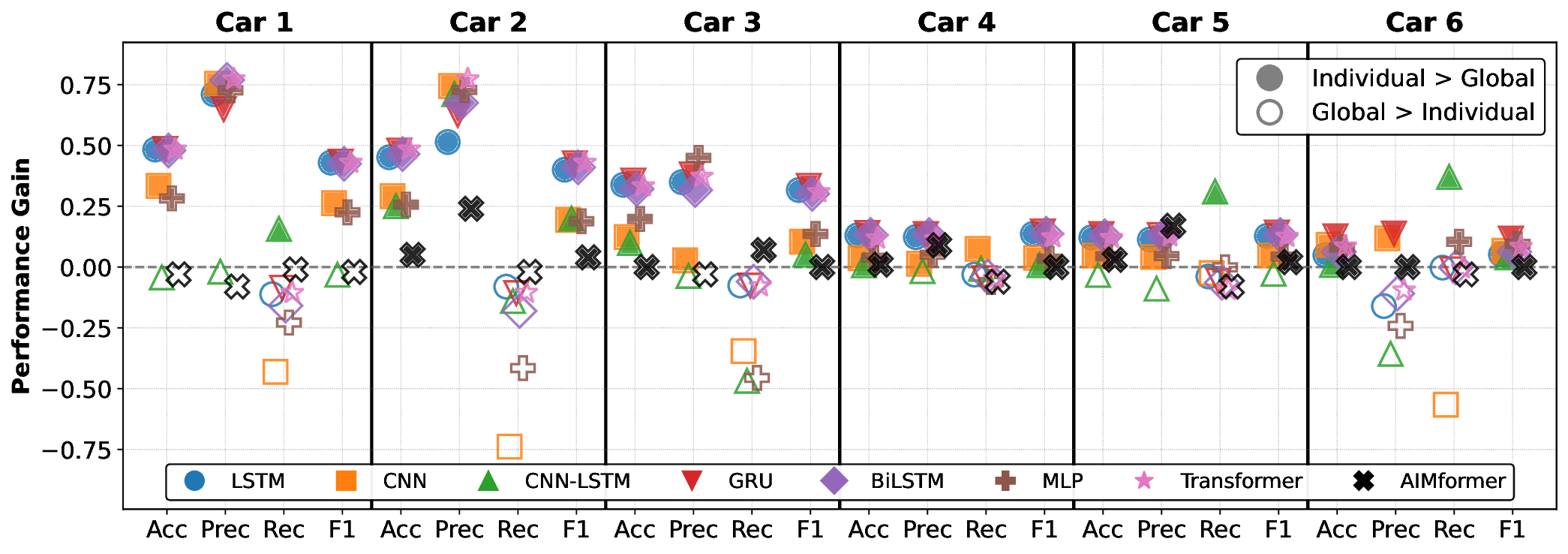
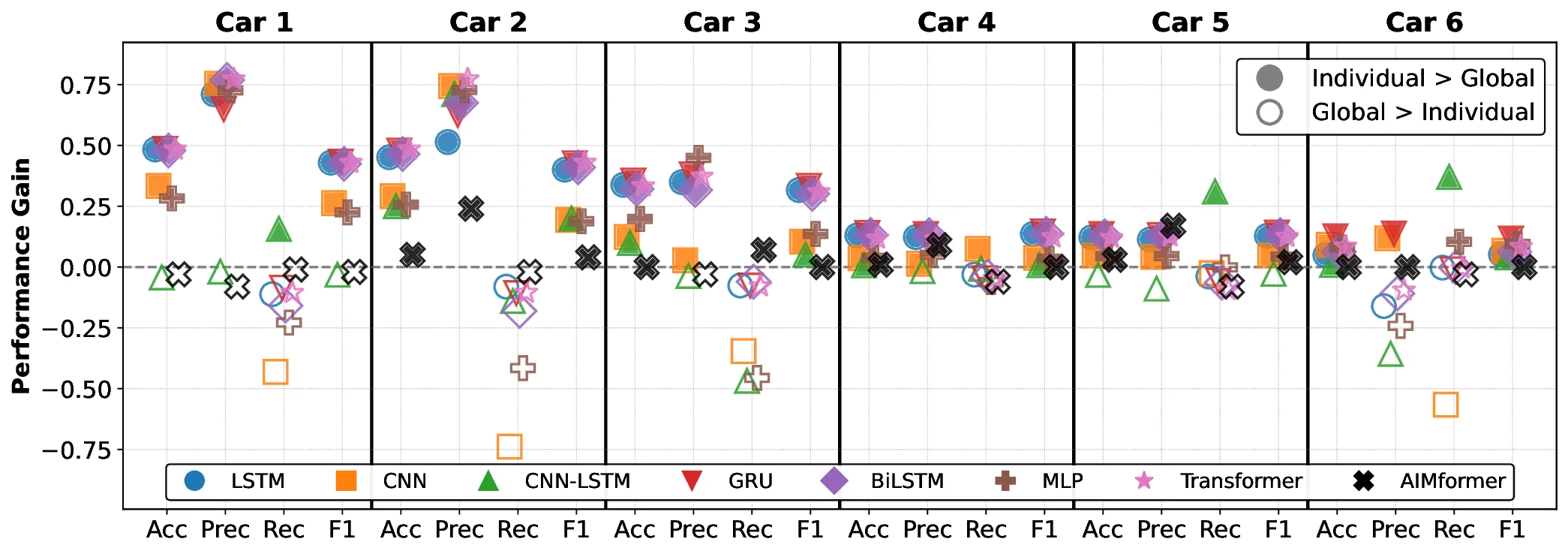
the requirements of safety-critical vehicular systems. Extensive
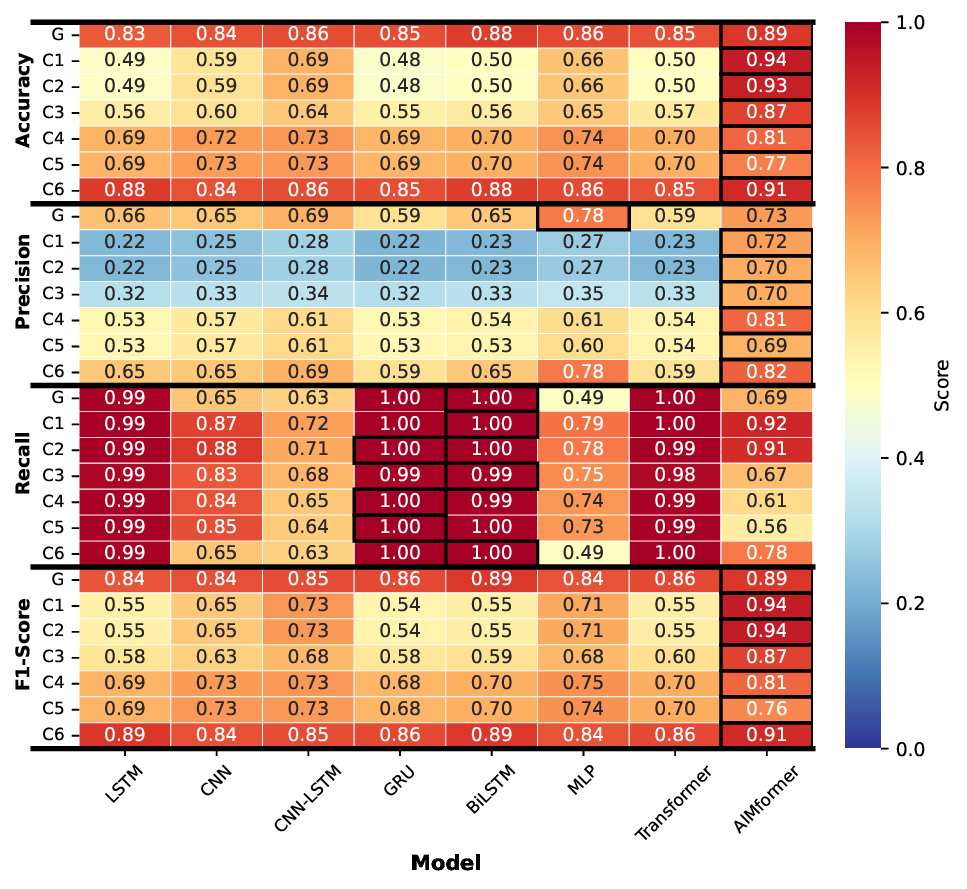
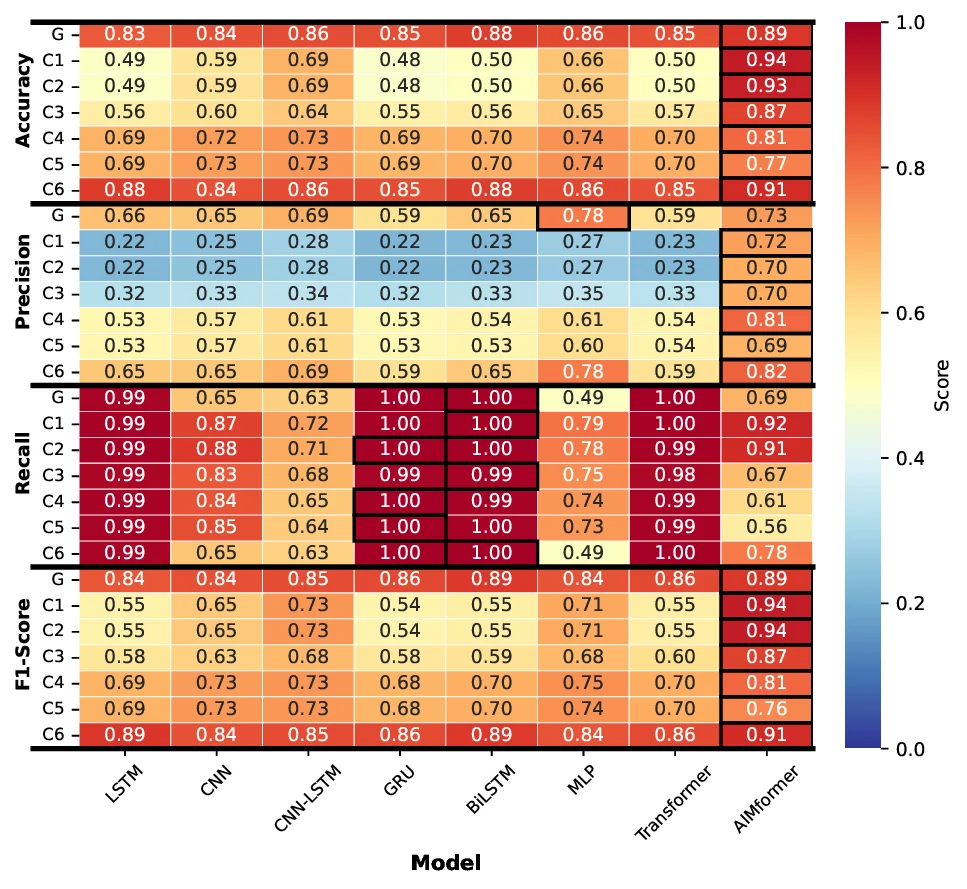
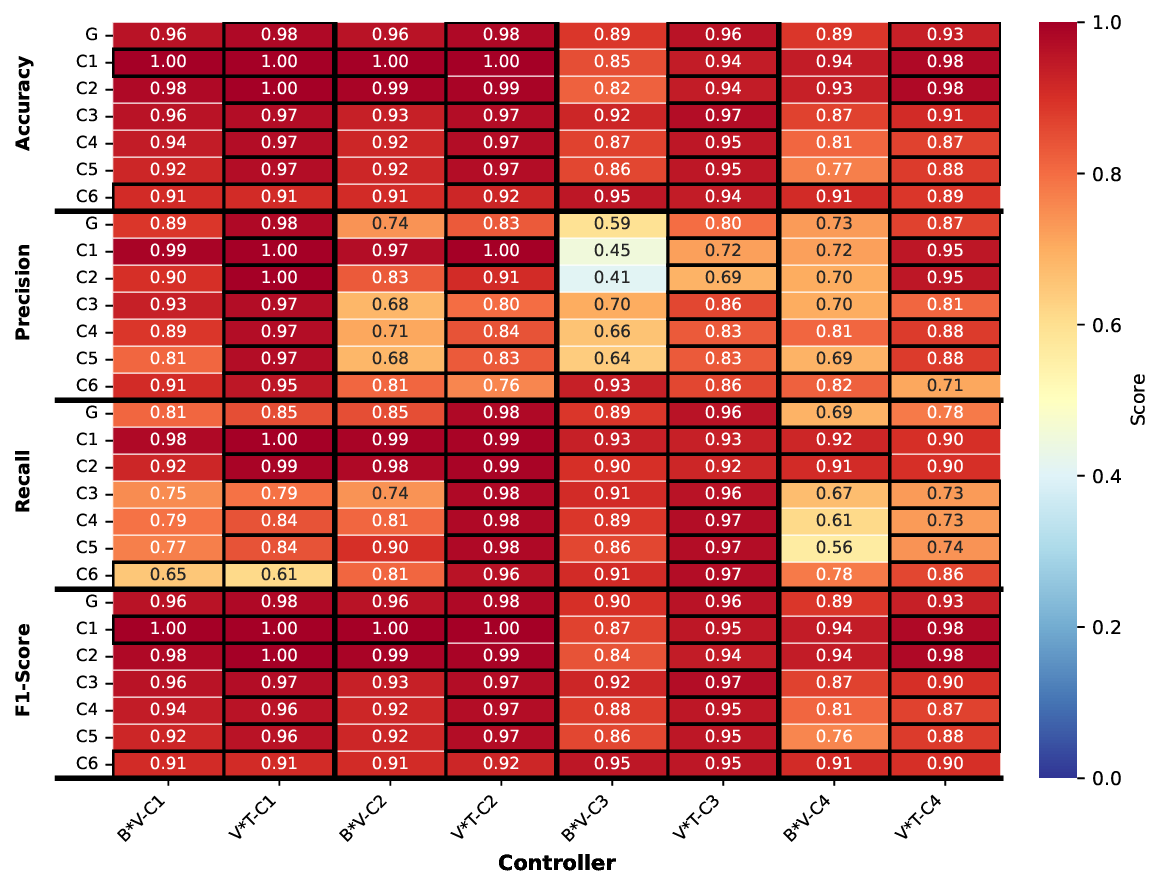
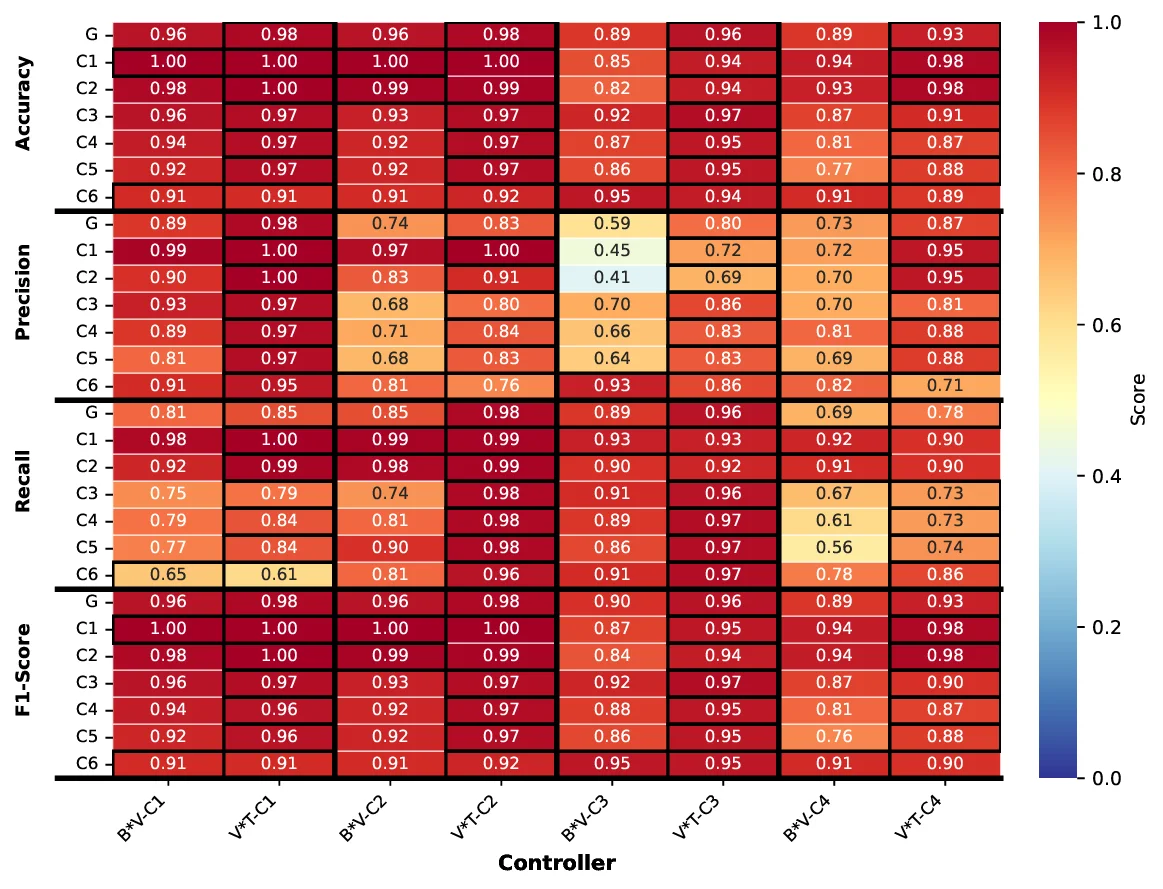
evaluation across 4 platoon controllers, multiple attack vectors,
and diverse mobility scenarios demonstrates superior perfor-
mance (≥0.93) compared to state-of-the-art baseline architec-
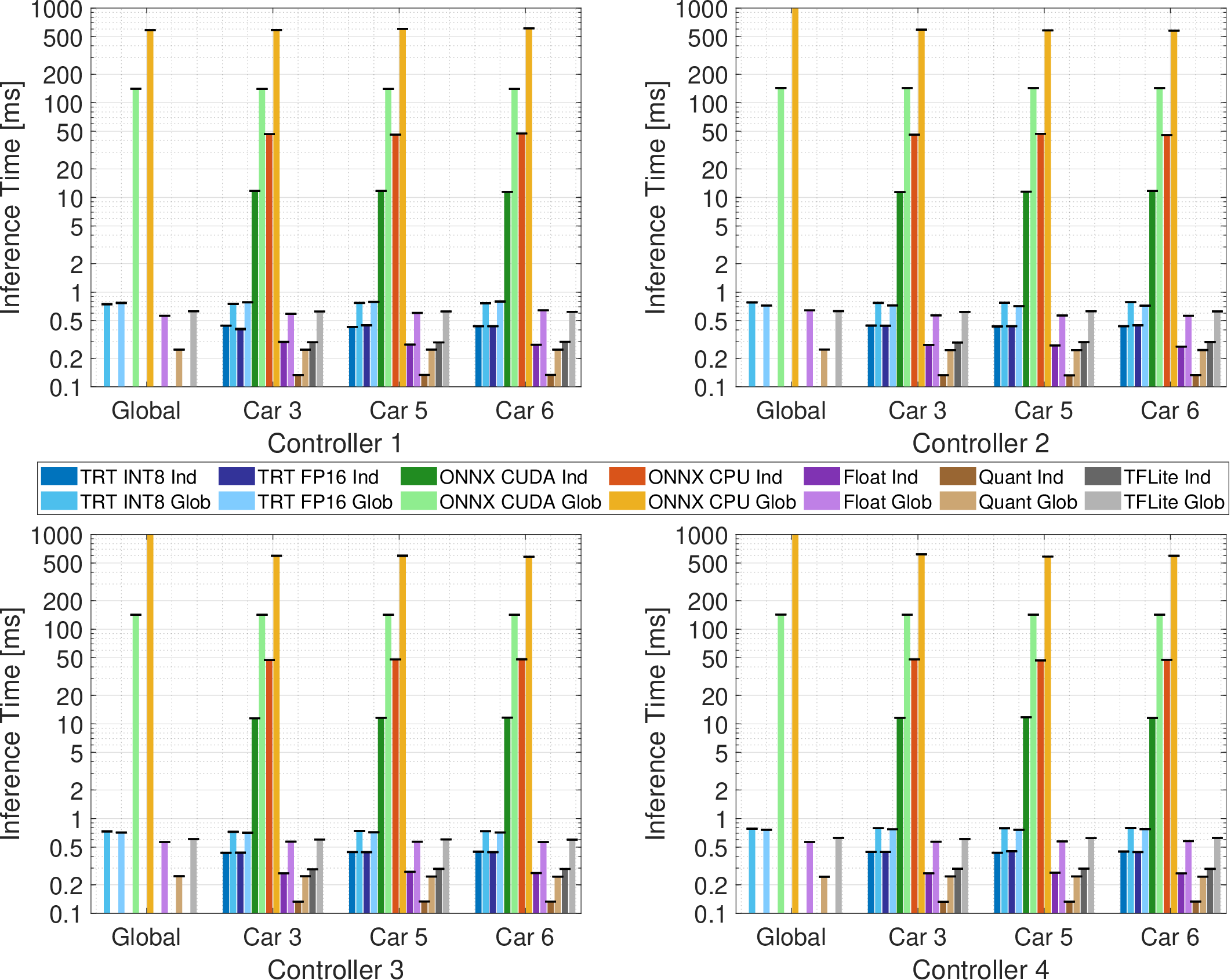
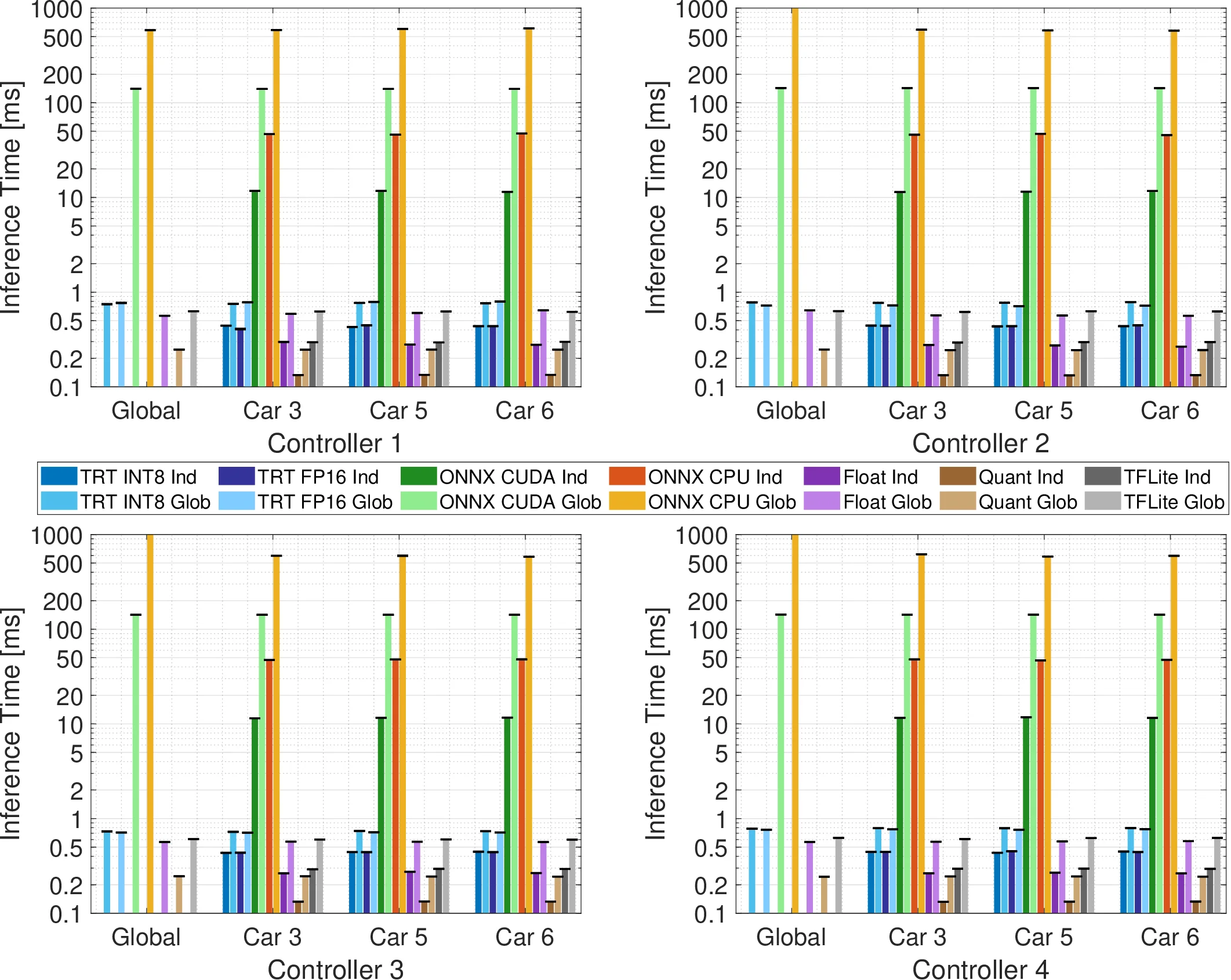
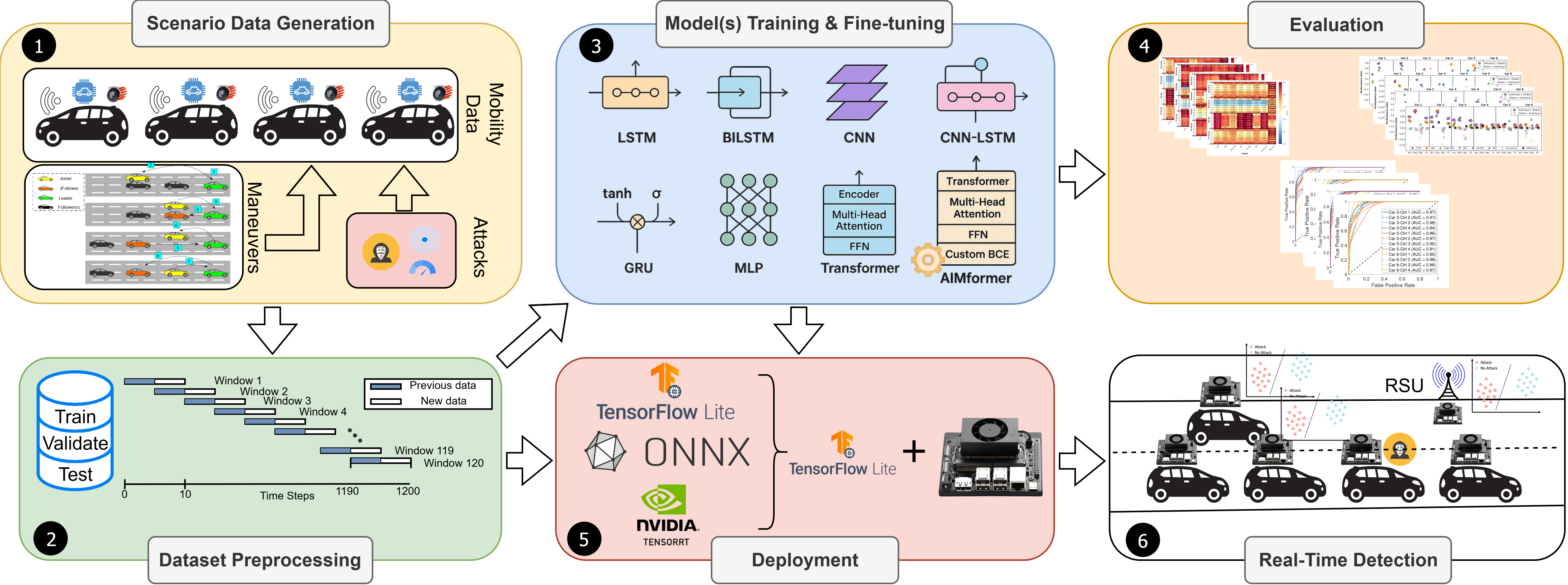
tures. A comprehensive deployment analysis utilizing TensorFlow
Lite (TFLite), Open Neural Network Exchange (ONNX), and
TensorRT achieves sub-millisecond inference latency, making it
suitable for real-time operation on resource-constrained edge
platforms. Hence, validating AIMFORMER is viable for both in-
vehicle and roadside infrastructure deployment.
Index Terms—Vehicular Platooning, Misbehavior Detection,
Data-driven Approaches, Methods for Security and Privacy, Con-
nected and Autonomous Vehicles, Vehicular Ad Hoc Networks.
I. INTRODUCTION
Internet of Vehicles (IoV) transforms modern transportation,
with Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure
(V2I) communication enabling cooperative driving applica-
tions [1]. Among the most promising representations of this
vision is vehicle platooning. It enables multiple vehicles to
travel in close formation with coordinated inter-vehicular
spacing, yielding substantial improvements in traffic through-
put, fuel efficiency, and safety [2], [3], [4], [5], [6]. Vehic-
ular platoons operate through Cooperative Adaptive Cruise
Control (CACC) systems that extend traditional Adaptive
Cruise Control (ACC) capabilities by incorporating real-time
*Equally contributing authors. Konstantinos Kalogiannis, Ahmed Mohamed
Hussain, and Panos Papadimitratos are with the Networked Systems Security
(NSS) Group, KTH Royal Institute of Technology, Stockholm, Sweden. Email:
{konkal, ahmhus, papadim}@kth.se. Hexu Li is with the Tech Validation –
AI department at the Chief Technology Officer (CTO) Organization, Lenovo,
Beijing, China. Email: lihx36@lenovo.com.
communication (Cooperative Awareness Message (CAM)) of
kinematic data, including position, velocity, and acceleration
via standardized protocols such as IEEE 802.11p or Cellular
Vehicle-to-Everything (V2X) [1].
This fundamental reliance on continuous wireless informa-
tion exchange, however, introduces critical security vulnera-
bilities that threaten both operational integrity and passenger
safety [7], [5]. The distributed nature of platoon coordination
creates an attack surface where malicious or compromised
vehicles can inject falsified information to manipulate the
behavior of other platoon members. Such attack consequences
range from reduced stability to complete platoon destabi-
lization and increased collision risks [8]. The effects can
be further amplified when misbehavior originates from the
platoon leader, given its key role in platooning. Unlike external
adversaries, which can be thwarted by secure V2X proto-
cols [1], [9], [10], [11], internal adversaries transmitting false
kinematic data pose a significant challenge that requires real-
time detection.
Traditional approaches to Misbehavior Detection Schemes
(MDSs) in Vehicular Ad-hoc Network (VANET) have pre-
dominantly employed plausibility checks, statistical outlier
detection, and rule-based behavioral analysis [12], [13]. While
computationally efficient, these techniques suffer from several
limitations: (i) high False Positive (FP) rates when encoun-
tering sophisticated attacks, (ii) inability to generalize across
diverse platoon configurations and control policies, and (iii)
inadequate mod
…(Full text truncated)…
📸 Image Gallery
Reference
This content is AI-processed based on ArXiv data.