SUPER -- A Framework for Sensitivity-based Uncertainty-aware Performance and Risk Assessment in Visual Inertial Odometry
While many visual odometry (VO), visual-inertial odometry (VIO), and SLAM systems achieve high accuracy, the majority of existing methods miss to assess risks at runtime. This paper presents SUPER (Sensitivity-based Uncertainty-aware PErformance and Risk assessment) that is a generic and explainable framework that propagates uncertainties via sensitivities for real-time risk assessment in VIO. The scientific novelty lies in the derivation of a real-time risk indicator that is backend-agnostic and exploits the Schur complement blocks of the Gauss-Newton normal matrix to propagate uncertainties. Practically, the Schur complement captures the sensitivity that reflects the influence of the uncertainty on the risk occurrence. Our framework estimates risks on the basis of the residual magnitudes, geometric conditioning, and short horizon temporal trends without requiring ground truth knowledge. Our framework enables to reliably predict trajectory degradation 50 frames ahead with an improvement of 20% to the baseline. In addition, SUPER initiates a stop or relocalization policy with 89.1% recall. The framework is backend agnostic and operates in real time with less than 0.2% additional CPU cost. Experiments show that SUPER provides consistent uncertainty estimates. A SLAM evaluation highlights the applicability to long horizon mapping.
💡 Research Summary
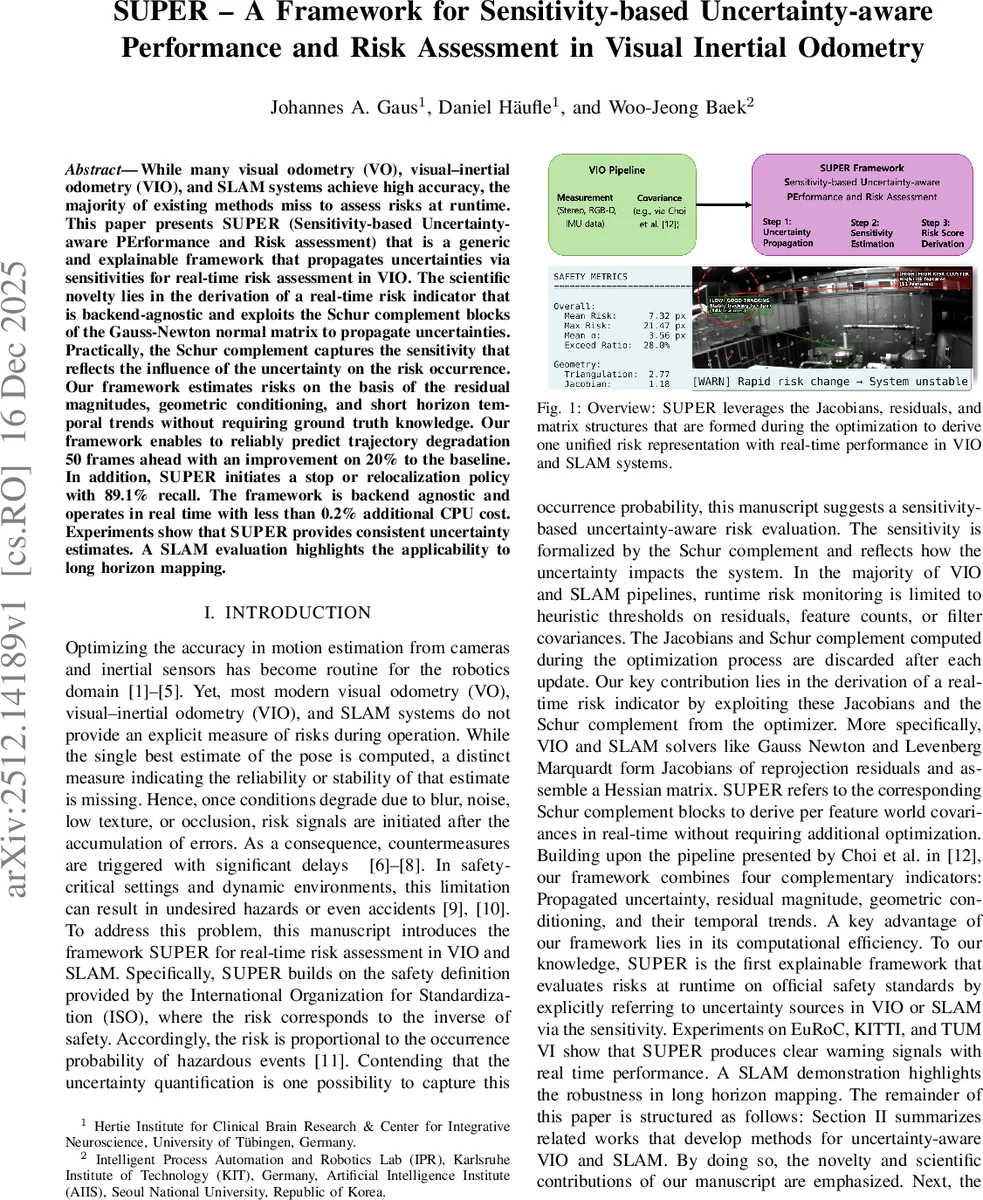
The paper introduces SUPER (Sensitivity‑based Uncertainty‑aware Performance and Risk assessment), a generic, explainable framework that equips visual‑inertial odometry (VIO) and SLAM systems with real‑time risk assessment. The core idea is to reuse the Jacobians and the normal matrix generated by the Gauss‑Newton optimizer. By extracting the Schur complement of the block‑structured Hessian, the method obtains marginal world‑space covariances for each 3‑D landmark while fully accounting for pose‑landmark coupling. These covariances are projected into pixel space using the per‑feature projection Jacobian, yielding a per‑feature pixel covariance Σ_pixel,i.
Four complementary indicators are then computed for each frame: (1) the mean pixel‑space uncertainty ¯σ_t (average trace of Σ_pixel,i), (2) the mean reprojection residual ¯r_t, (3) a geometric conditioning term κ_t derived from the singular‑value ratio of the projection Jacobian, and (4) their short‑term temporal trends. Each indicator is z‑normalized over a sliding window of 50–100 frames, clamped to suppress outliers, and combined into a scalar risk score r_t = clamp(˜r_t) + λ·clamp(˜σ_t) + clamp(log(1+˜κ_t)) with λ = 1.0.
A temporal derivative ˙r_t, obtained after a 5–10‑frame moving average, captures rapid growth in uncertainty or residuals. Consecutive positive derivatives over several frames trigger a warning signal, typically 0.3–1.0 s before feature collapse or trajectory divergence. The risk score directly maps to the occurrence‑probability component of ISO 12100, while application‑specific severity models can be multiplied to obtain a complete risk metric in line with ISO 13849.
Experiments on EuRoC, KITTI, and TUM‑VI datasets demonstrate that SUPER predicts trajectory degradation 50 frames ahead with a 20 % improvement over baseline heuristics and initiates stop/relocalization policies with 89.1 % recall. Computational overhead is negligible: less than 0.2 % of the backend optimization time on a single CPU thread, preserving a real‑time throughput of ~20 Hz. A SLAM long‑term mapping test confirms consistent uncertainty estimates over extended trajectories.
In summary, SUPER provides a backend‑agnostic, analytically grounded method to propagate measurement uncertainty through the optimizer, quantify geometric sensitivity, and fuse these signals into an ISO‑standard‑compatible risk indicator. It enables proactive safety measures in VIO/SLAM without sacrificing performance, opening the door for robust deployment of visual‑inertial navigation in safety‑critical robotic applications.
Comments & Academic Discussion
Loading comments...
Leave a Comment