LSM: A Comprehensive Metric for Assessing the Safety of Lane Detection Systems in Autonomous Driving
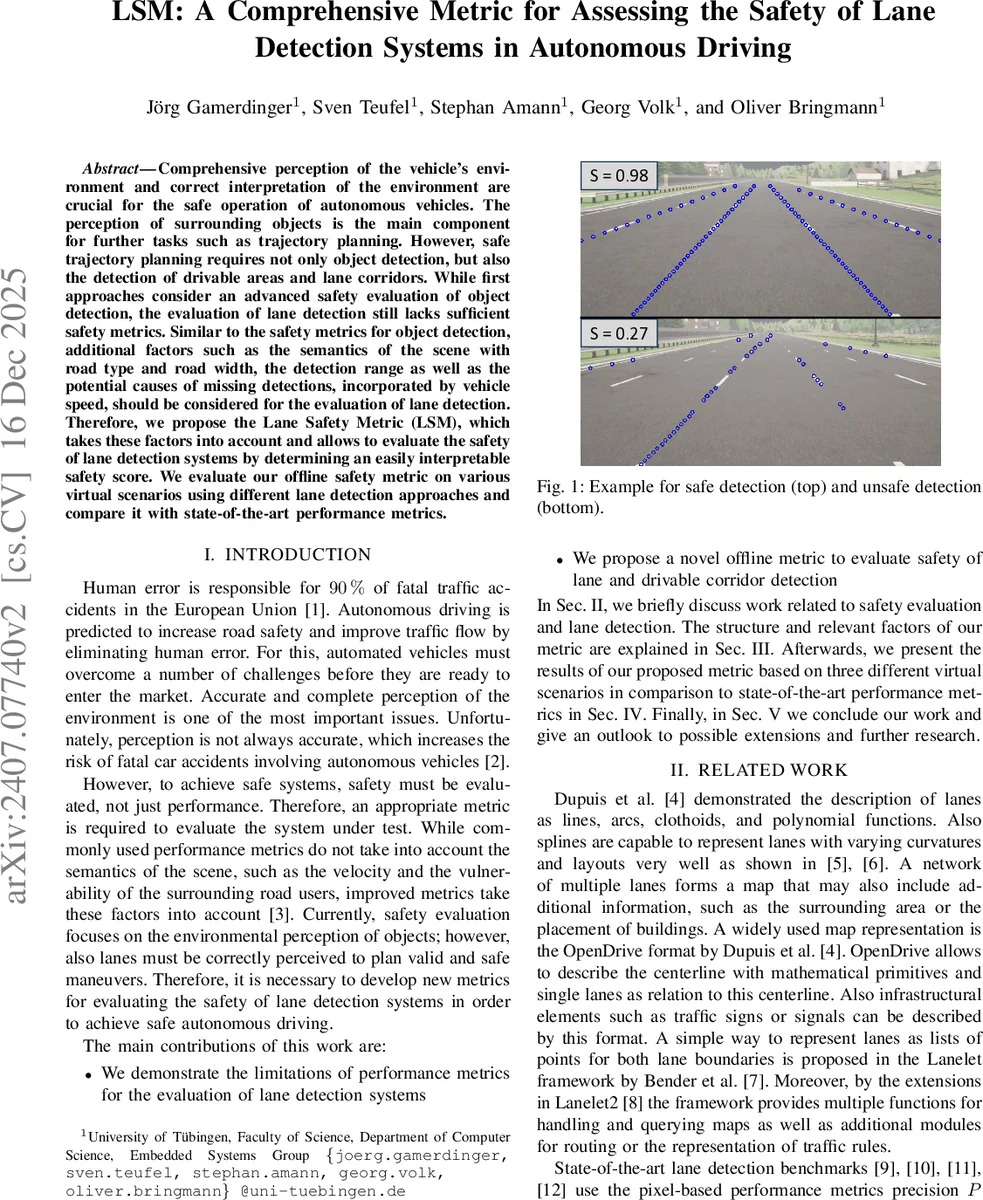
Comprehensive perception of the vehicle’s environment and correct interpretation of the environment are crucial for the safe operation of autonomous vehicles. The perception of surrounding objects is the main component for further tasks such as trajectory planning. However, safe trajectory planning requires not only object detection, but also the detection of drivable areas and lane corridors. While first approaches consider an advanced safety evaluation of object detection, the evaluation of lane detection still lacks sufficient safety metrics. Similar to the safety metrics for object detection, additional factors such as the semantics of the scene with road type and road width, the detection range as well as the potential causes of missing detections, incorporated by vehicle speed, should be considered for the evaluation of lane detection. Therefore, we propose the Lane Safety Metric (LSM), which takes these factors into account and allows to evaluate the safety of lane detection systems by determining an easily interpretable safety score. We evaluate our offline safety metric on various virtual scenarios using different lane detection approaches and compare it with state-of-the-art performance metrics.
💡 Research Summary
The paper addresses a critical gap in autonomous‑vehicle perception evaluation: while object‑detection safety metrics have been explored, lane‑detection lacks a safety‑oriented quantitative measure. To fill this void, the authors propose the Lane Safety Metric (LSM), an offline score that integrates three distinct aspects of lane perception with vehicle dynamics and scene semantics.
-
Longitudinal Detection Range (s_long).
Using the vehicle’s current speed (v₀), braking deceleration (a), and processing delay (t_delay), the required stopping distance d_long is computed as 1.1 · (v₀·t_delay + v₀²/(2a)). The detected lane length d_det is taken as the shorter of the two lane‑boundary lengths. If d_det ≥ d_long, the longitudinal safety score is set to 1.0; otherwise the residual speed after braking over d_det (v_r) is calculated, and a severity‑based mapping (derived from crash‑fatality studies) assigns a score between 0.0 and 0.8. Separate severity tables are provided for vehicles and vulnerable road users (VRUs). -
Lateral Detection Accuracy (s_lat).
The metric evaluates the Euclidean distance d_lat between the detected lane’s centerline and the ground‑truth (GT) centerline. A tolerable lateral deviation th_lat is derived from lane width (w_l) and vehicle width (w_v) according to German road standards (urban 0.70 m, rural 0.95 m, motorway 1.20 m). If d_lat ≤ 0.8·th_lat, a linear mapping yields s_lat in the range
Comments & Academic Discussion
Loading comments...
Leave a Comment