PrediFlow: A Flow-Based Prediction-Refinement Framework for Real-Time Human Motion Prediction in Human-Robot Collaboration
Stochastic human motion prediction is critical for safe and effective human-robot collaboration (HRC) in industrial remanufacturing, as it captures human motion uncertainties and multi-modal behaviors that deterministic methods cannot handle. While earlier works emphasize highly diverse predictions, they often generate unrealistic human motions. More recent methods focus on accuracy and real-time performance, yet there remains potential to improve prediction quality further without exceeding time budgets. Additionally, current research on stochastic human motion prediction in HRC typically considers human motion in isolation, neglecting the influence of robot motion on human behavior. To address these research gaps and enable real-time, realistic, and interaction-aware human motion prediction, we propose a novel prediction-refinement framework that integrates both human and robot observed motion to refine the initial predictions produced by a pretrained state-of-the-art predictor. The refinement module employs a Flow Matching structure to account for uncertainty. Experimental studies on the HRC desktop disassembly dataset demonstrate that our method significantly improves prediction accuracy while preserving the uncertainties and multi-modalities of human motion. Moreover, the total inference time of the proposed framework remains within the time budget, highlighting the effectiveness and practicality of our approach.
💡 Research Summary
This paper introduces “PrediFlow,” a novel two-stage framework designed to address the challenge of real-time, stochastic human motion prediction in Human-Robot Collaboration (HRC) settings, such as industrial disassembly for remanufacturing. The work is motivated by three identified gaps in existing research: the tendency of early stochastic methods to generate unrealistic motions in pursuit of diversity, the room for further quality improvement in recent accurate and fast predictors, and the prevalent oversight of robot motion’s influence on human behavior in collaborative tasks.
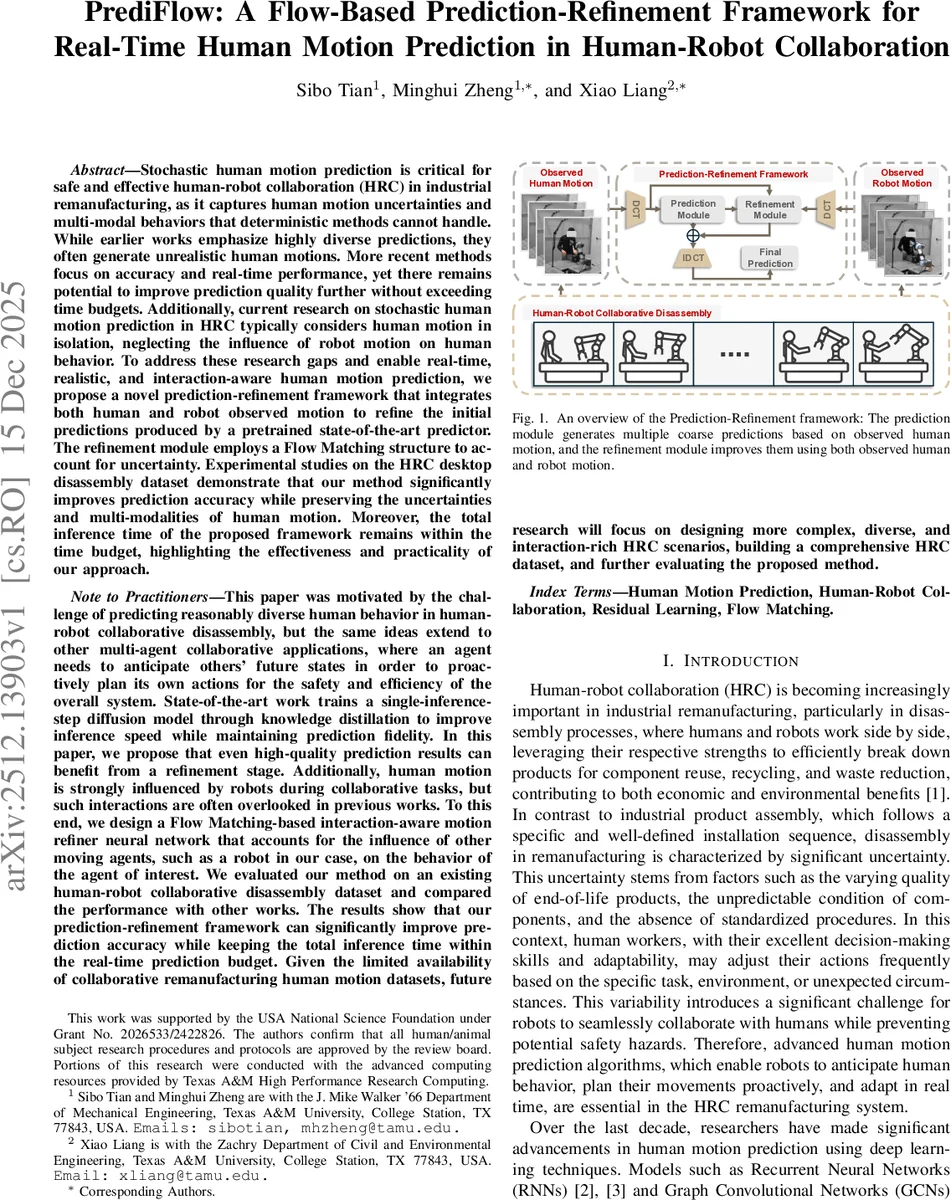
To bridge these gaps, PrediFlow proposes a coarse-to-fine “Prediction-Refinement” paradigm. The framework consists of two main components. First, a Prediction Module takes observed human motion history as input and generates multiple initial, coarse predictions of future human poses. This module leverages a pre-trained, state-of-the-art real-time stochastic predictor (e.g., SwiftDiff), which is already capable of fast and reasonably accurate predictions. Second, a Refinement Module, architected based on Flow Matching, takes these initial predictions, the observed human motion, and crucially, the observed robot motion as conditional inputs. Its objective is to learn and predict the residual—the discrepancy between the initial coarse prediction and the ground truth future motion. The final prediction is obtained by adding this predicted residual to the initial prediction. The refinement module can produce multiple residuals for a single initial prediction, thereby preserving the uncertainty and multi-modality of human motion.
Methodologically, the paper processes motion sequences in the frequency domain using Discrete Cosine Transform (DCT) for better temporal consistency. The choice of Flow Matching over other generative models like Diffusion is key: it learns a straighter optimal transport path, enabling efficient one-step generation without the need for knowledge distillation, which can compromise quality. The refinement network’s design explicitly encodes robot motion information to condition the human motion refinement process, thereby modeling human-robot interaction.
Comprehensive experiments are conducted on a public HRC desktop disassembly dataset. Baselines include diffusion-based models (TransFusion), a state-of-the-art real-time one-step predictor (SwiftDiff), and an ablated version of PrediFlow using only its prediction module. Results demonstrate that PrediFlow significantly outperforms all baselines across key metrics, including Best-of-Many, Average, and Worst-of-Many errors, indicating an overall improvement in prediction quality, not just the best sample. Qualitative analysis shows that the refined motions are more physically plausible and contextually aware of the robot’s presence and movement. Critically, despite adding a refinement stage, the total inference time of the full PrediFlow framework remains within the real-time budget (approximately 0.1 seconds), thanks to the efficiency of both the one-step prediction module and the one-step Flow Matching refiner.
In conclusion, PrediFlow successfully integrates interaction-awareness through robot motion conditioning and leverages a Flow Matching-based refinement stage to enhance the accuracy of a fast base predictor. It achieves a practical balance between prediction quality, the preservation of motion uncertainty, and real-time inference capability, offering a promising solution for safe and efficient human-robot collaboration in dynamic industrial environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment