Dexterous manipulation is challenging because it requires understanding how subtle hand motion influences the environment through contact with objects. We introduce DexWM, a Dexterous Manipulation World Model that predicts the next latent state of the environment conditioned on past states and dexterous actions. To overcome the scarcity of dexterous manipulation datasets, DexWM is trained on over 900 hours of human and non-dexterous robot videos. To enable fine-grained dexterity, we find that predicting visual features alone is insufficient; therefore, we introduce an auxiliary hand consistency loss that enforces accurate hand configurations. DexWM outperforms prior world models conditioned on text, navigation, and full-body actions, achieving more accurate predictions of future states. DexWM also demonstrates strong zero-shot generalization to unseen manipulation skills when deployed on a Franka Panda arm equipped with an Allegro gripper, outperforming Diffusion Policy by over 50% on average in grasping, placing, and reaching tasks.
Deep Dive into World Models Can Leverage Human Videos for Dexterous Manipulation.
Dexterous manipulation is challenging because it requires understanding how subtle hand motion influences the environment through contact with objects. We introduce DexWM, a Dexterous Manipulation World Model that predicts the next latent state of the environment conditioned on past states and dexterous actions. To overcome the scarcity of dexterous manipulation datasets, DexWM is trained on over 900 hours of human and non-dexterous robot videos. To enable fine-grained dexterity, we find that predicting visual features alone is insufficient; therefore, we introduce an auxiliary hand consistency loss that enforces accurate hand configurations. DexWM outperforms prior world models conditioned on text, navigation, and full-body actions, achieving more accurate predictions of future states. DexWM also demonstrates strong zero-shot generalization to unseen manipulation skills when deployed on a Franka Panda arm equipped with an Allegro gripper, outperforming Diffusion Policy by over 50% on
World Models Can Leverage Human Videos for
Dexterous Manipulation
Raktim Gautam Goswami1,2,∗, Amir Bar1, David Fan1, Tsung-Yen Yang1, Gaoyue Zhou1,2, Prashanth
Krishnamurthy2, Michael Rabbat1, Farshad Khorrami2, Yann LeCun1,2
1FAIR at Meta, 2New York University
∗Work done during internship at Meta
Dexterous manipulation is challenging because it requires understanding how subtle hand motion
influences the environment through contact with objects.
We introduce DexWM, a Dexterous
Manipulation World Model that predicts the next latent state of the environment conditioned on past
states and dexterous actions. To overcome the scarcity of dexterous manipulation datasets, DexWM is
trained on over 900 hours of human and non-dexterous robot videos. To enable fine-grained dexterity,
we find that predicting visual features alone is insufficient; therefore, we introduce an auxiliary hand
consistency loss that enforces accurate hand configurations. DexWM outperforms prior world models
conditioned on text, navigation, and full-body actions, achieving more accurate predictions of future
states. DexWM also demonstrates strong zero-shot generalization to unseen manipulation skills when
deployed on a Franka Panda arm equipped with an Allegro gripper, outperforming Diffusion Policy by
over 50% on average in grasping, placing, and reaching tasks.
Project Page: https://raktimgg.github.io/dexwm/
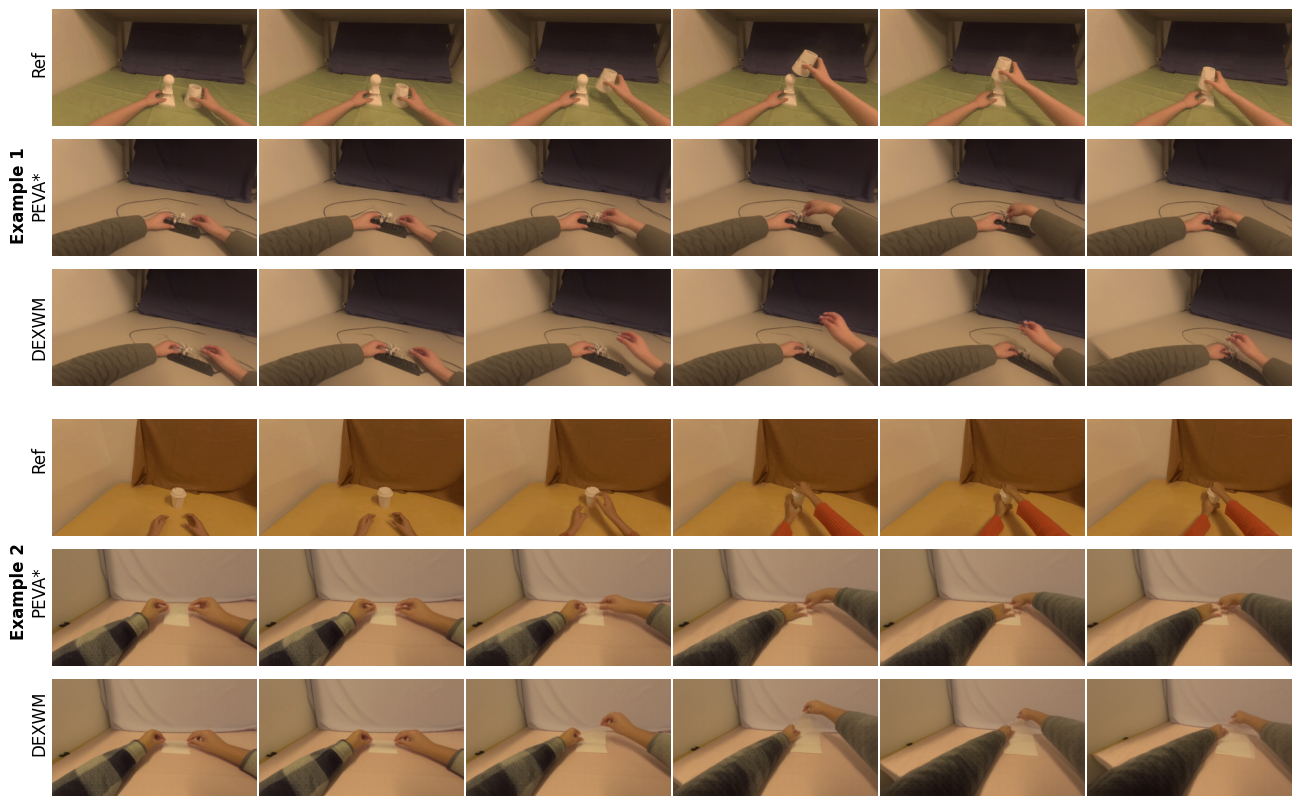
Figure 1 We introduce DexWM, a Dexterous Manipulation World Model which predicts future latent states of the
environment based on past states and dexterous actions. Trained on large-scale human and non-dexterous robot video
data, DexWM learns to simulate complex manipulation trajectories in the latent space. With minimal fine-tuning on a
small exploratory robot simulation dataset, DexWM enables robust planning for novel reaching, grasping, and placing
tasks in simulation, and achieves zero-shot transfer to real-world robot tasks.
1
arXiv:2512.13644v1 [cs.RO] 15 Dec 2025
1
Introduction
As embodied agents become increasingly integrated
into daily lives, dexterous manipulation emerges as
a critical capability for achieving human-like inter-
action with the physical world.
Everyday tasks
like cooking, as well as high-stakes applications like
surgery, demand a level of dexterity that is infeasible
with commonly used parallel-jaw grippers. Dexterous
grippers are modeled after the human hand and can
unlock advanced human skills, including handling
complex tools, performing fine-grained movements,
and executing in-hand manipulation [39, 63, 69, 93].
Recent advances in deep learning have enabled the
development of computer vision based policies for
robotic manipulation [22, 23, 37, 56, 59]. However,
these approaches face challenges in generalizing to
unseen tasks and in planning and executing policies
in physical environments [15, 32, 101]. Successful
execution requires models to reason about how their
actions affect objects and their surroundings; for
example, recognizing that opening the gripper when
holding an object will cause it to drop.
World models can learn environmental dynamics
from observation and action [58], and thus offer a
promising solution.
Early work on learned world
models [48, 74, 102] has primarily focused on small-
scale tasks with constrained environments and lim-
ited action spaces. More recent efforts have extended
these approaches to handle complex actions, such as
text [2], navigation [10] and whole-body motion [8].
However, the action spaces in these methods are often
too coarse to capture the fine-grained information
required for precise dexterous control.
Moreover,
building world models for dexterous manipulation is
challenging as there are no large-scale robotic datasets
with dexterous grippers.
To address these challenges, we propose DexWM
(Figure 1), a latent space world model that learns
from human data to predict future latent states based
on past states and dexterous hand actions. Inspired
by recent work [29, 80] that leverages human train-
ing data, we pre-train DexWM on EgoDex [47], a
large-scale egocentric human interaction dataset, and
further incorporate DROID [54] sequences, consisting
of non-dexterous robot manipulation, to reduce the
embodiment gap. DexWM’s actions are represented
as differences in 3D hand keypoints and camera poses,
capturing detailed hand configurations and enabling
the model to learn how hand posture changes affect
the environment.
We find that accurately simulating hand locations
using the next latent state prediction objective alone
is difficult. Therefore, we train DexWM to jointly
optimize both the future environment state and the
hand configuration, providing a richer learning signal
for dexterity. With this auxiliary hand consistency
loss, DexWM outperforms existing world models [2,
8, 10] in open-loop trajectory simulation.
Furthermore, DexWM enables strong zero-shot trans-
fer to dexterous robot manipulation tasks by opti-
mizing actions at test time within an MPC frame-
wo
…(Full text truncated)…
This content is AI-processed based on ArXiv data.