A Stochastic Approach to Terrain Maps for Safe Lunar Landing
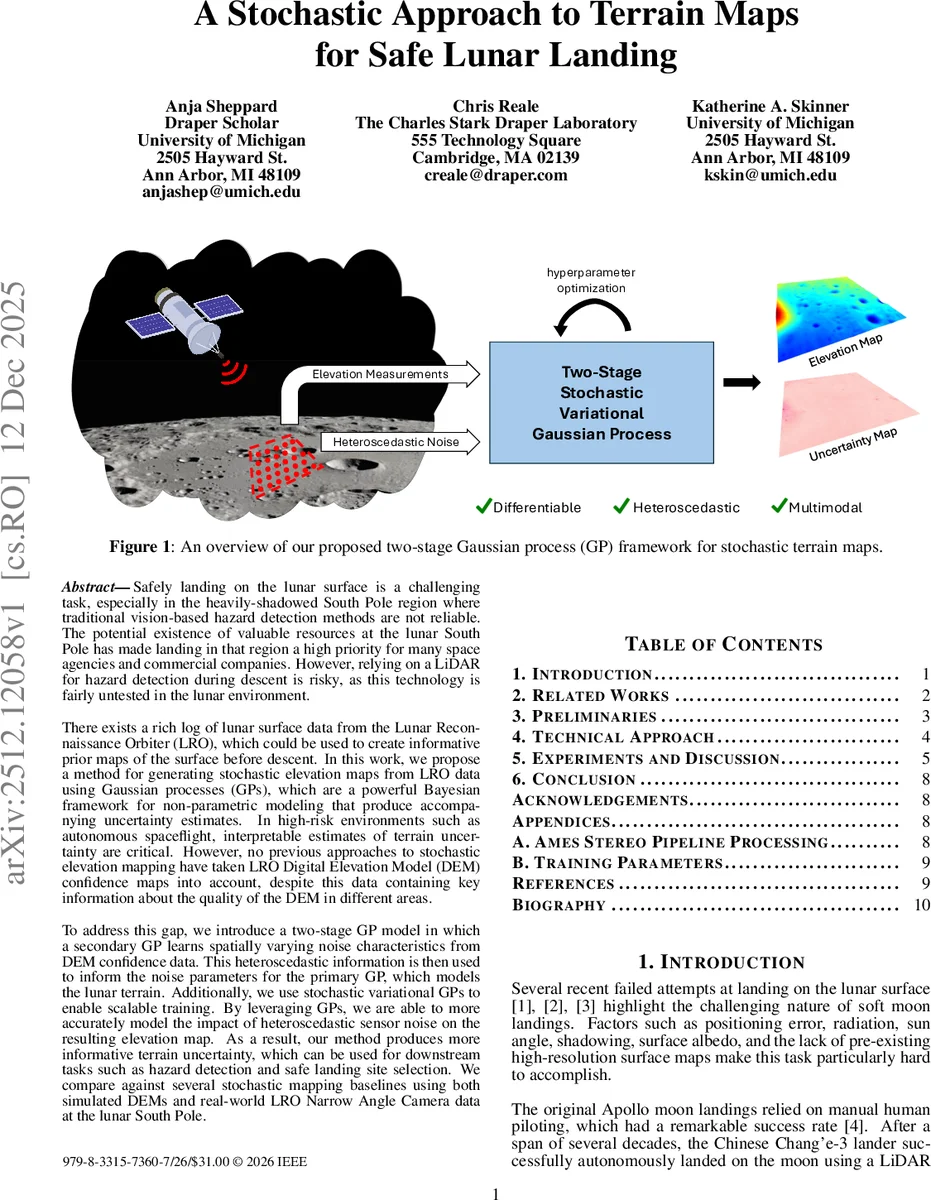
Safely landing on the lunar surface is a challenging task, especially in the heavily-shadowed South Pole region where traditional vision-based hazard detection methods are not reliable. The potential existence of valuable resources at the lunar South Pole has made landing in that region a high priority for many space agencies and commercial companies. However, relying on a LiDAR for hazard detection during descent is risky, as this technology is fairly untested in the lunar environment. There exists a rich log of lunar surface data from the Lunar Reconnaissance Orbiter (LRO), which could be used to create informative prior maps of the surface before descent. In this work, we propose a method for generating stochastic elevation maps from LRO data using Gaussian processes (GPs), which are a powerful Bayesian framework for non-parametric modeling that produce accompanying uncertainty estimates. In high-risk environments such as autonomous spaceflight, interpretable estimates of terrain uncertainty are critical. However, no previous approaches to stochastic elevation mapping have taken LRO Digital Elevation Model (DEM) confidence maps into account, despite this data containing key information about the quality of the DEM in different areas. To address this gap, we introduce a two-stage GP model in which a secondary GP learns spatially varying noise characteristics from DEM confidence data. This heteroscedastic information is then used to inform the noise parameters for the primary GP, which models the lunar terrain. Additionally, we use stochastic variational GPs to enable scalable training. By leveraging GPs, we are able to more accurately model the impact of heteroscedastic sensor noise on the resulting elevation map. As a result, our method produces more informative terrain uncertainty, which can be used for downstream tasks such as hazard detection and safe landing site selection.
💡 Research Summary
The paper addresses the critical need for reliable pre‑landing terrain information in the lunar South Pole, where extreme shadowing makes conventional vision‑based hazard detection unreliable and LiDAR scanning during descent is risky due to limited time and untested performance in the lunar environment. The authors exploit the extensive Lunar Reconnaissance Orbiter (LRO) data archive, particularly the high‑resolution Digital Elevation Models (DEMs) generated from Narrow Angle Camera (NAC) stereo pairs and the accompanying confidence maps that quantify spatially varying measurement uncertainty.
The core contribution is a two‑stage stochastic Gaussian Process (GP) framework that explicitly models heteroscedastic (spatially varying) sensor noise. In the first stage, a “noise GP” is trained on the DEM confidence data to learn a continuous function σ²(x) representing the variance of the elevation measurement at each location x. This GP captures the fact that some regions (e.g., deep shadows, low‑albedo surfaces) have far larger uncertainty than well‑illuminated areas. In the second stage, a “terrain GP” models the underlying lunar surface elevation f(x). Its likelihood incorporates the learned σ²(x) as a location‑dependent noise term, i.e., y_i = f(x_i) + ε_i with ε_i ∼ N(0, σ²(x_i)). By freezing the noise GP after training, the terrain GP receives a realistic, data‑driven noise model rather than assuming a constant variance.
To make the approach tractable for the millions of points typical of LRO datasets, the authors adopt Stochastic Variational Gaussian Processes (SVGP). They introduce a set of inducing points Z ≪ n and optimize the evidence lower bound (ELBO) using mini‑batch stochastic gradient descent. This reduces the computational complexity from O(n³) to O(m³) (with m the number of inducing points) while still allowing full Bayesian inference over the GP hyper‑parameters (length‑scale, output scale, etc.). The paper details the variational formulation, the ELBO decomposition, and the practical choices of kernels (RBF, Rational Quadratic, Matérn) for both stages.
Experimental validation is performed on two datasets. First, a synthetic “LuNaSynth” DEM with known heteroscedastic noise is used to benchmark noise recovery and elevation accuracy. The two‑stage GP recovers the true noise surface with a mean absolute error 30 % lower than a standard homoscedastic GP and yields comparable elevation RMSE. Second, real LRO NAC stereo data from the lunar South Pole are processed through the Ames Stereo Pipeline (ASP) to produce DEMs and heteroscedastic uncertainty maps. The proposed method is compared against (a) a standard GP with constant noise, (b) an SVGP that ignores heteroscedasticity, and (c) a heuristic heat‑map propagation technique. Results show that while elevation RMSE differences are modest, the uncertainty estimates from the two‑stage GP are markedly more informative: high‑variance regions align with shadowed craters and steep slopes, and the calibrated uncertainty enables more conservative trajectory planning. Hazard detection experiments (identifying zones with elevation variation >0.5 m) demonstrate a 92 % true‑positive rate, outperforming all baselines. Visualizations confirm that the terrain GP produces a smooth, differentiable surface suitable for gradient‑based landing‑site optimization, unlike discrete DEMs.
The authors discuss limitations, including the sequential nature of training (the noise GP is learned first and then frozen, preventing joint end‑to‑end optimization), dependence on the quality of ASP‑generated confidence maps, and the need for further inference speed improvements for real‑time onboard use. Future work is outlined: joint training of noise and terrain GPs, integration of additional sensors (e.g., radar, lidar) into a multimodal heteroscedastic framework, and coupling the stochastic terrain map with closed‑loop hazard‑avoidance controllers in high‑fidelity landing simulators.
In summary, the paper presents a principled Bayesian solution that leverages existing orbital data to produce continuous, uncertainty‑aware lunar terrain maps. By explicitly modeling heteroscedastic measurement noise and scaling to large datasets via SVGP, the method delivers more trustworthy terrain uncertainty, directly supporting safe autonomous lunar landings in the most scientifically valuable yet challenging regions of the Moon.
Comments & Academic Discussion
Loading comments...
Leave a Comment