DOS: Distilling Observable Softmaps of Zipfian Prototypes for Self-Supervised Point Representation
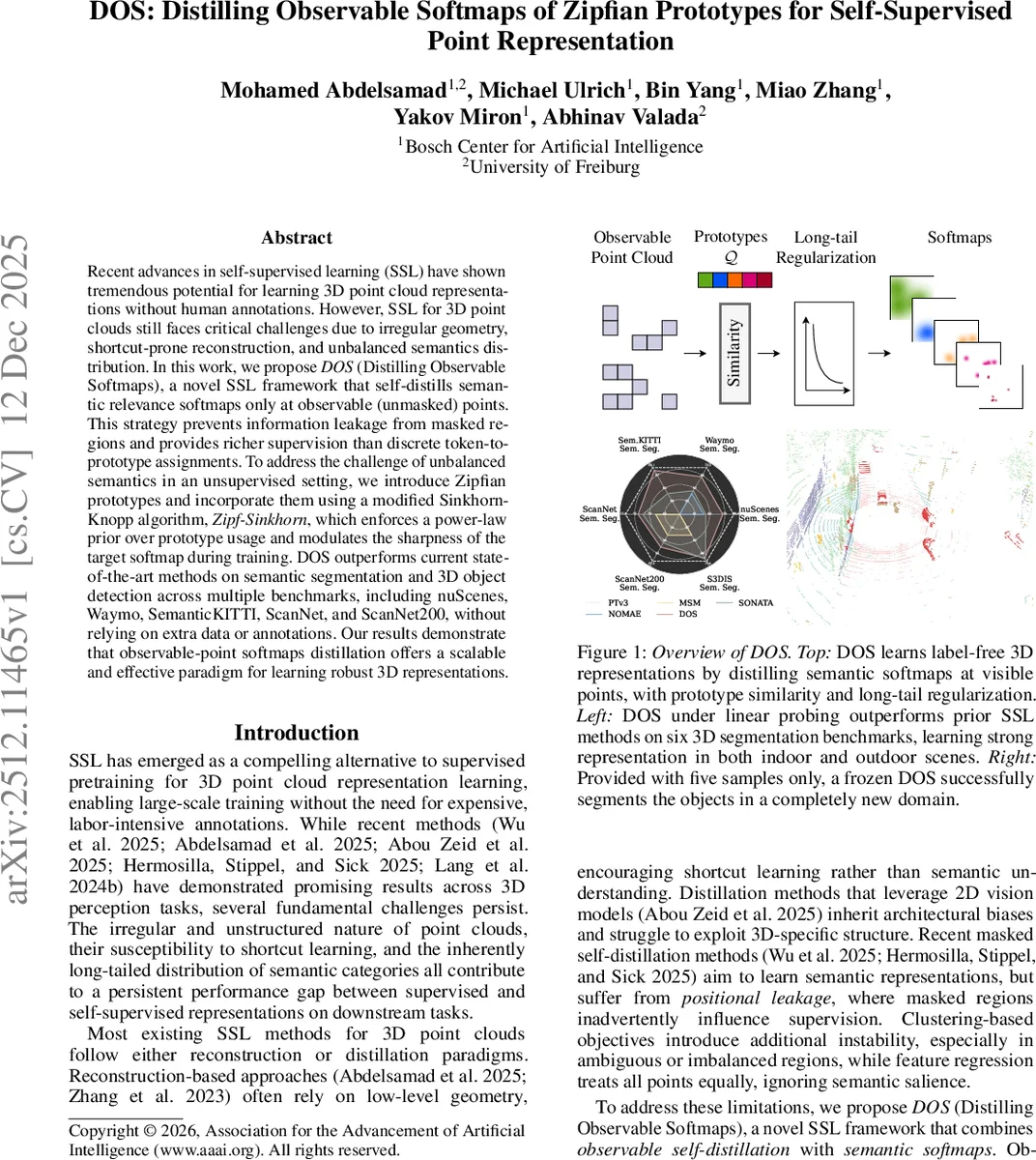
Recent advances in self-supervised learning (SSL) have shown tremendous potential for learning 3D point cloud representations without human annotations. However, SSL for 3D point clouds still faces critical challenges due to irregular geometry, shortcut-prone reconstruction, and unbalanced semantics distribution. In this work, we propose DOS (Distilling Observable Softmaps), a novel SSL framework that self-distills semantic relevance softmaps only at observable (unmasked) points. This strategy prevents information leakage from masked regions and provides richer supervision than discrete token-to-prototype assignments. To address the challenge of unbalanced semantics in an unsupervised setting, we introduce Zipfian prototypes and incorporate them using a modified Sinkhorn-Knopp algorithm, Zipf-Sinkhorn, which enforces a power-law prior over prototype usage and modulates the sharpness of the target softmap during training. DOS outperforms current state-of-the-art methods on semantic segmentation and 3D object detection across multiple benchmarks, including nuScenes, Waymo, SemanticKITTI, ScanNet, and ScanNet200, without relying on extra data or annotations. Our results demonstrate that observable-point softmaps distillation offers a scalable and effective paradigm for learning robust 3D representations.
💡 Research Summary
The paper introduces DOS (Distilling Observable Softmaps of Zipfian Prototypes), a groundbreaking self-supervised learning (SSL) framework designed to advance 3D point cloud representation learning. While SSL has demonstrated immense potential in 2D vision, applying it to 3D point clouds remains challenging due to irregular geometric structures, the risk of “shortcut” learning during masked reconstruction, and the inherent semantic imbalance found in 3D datasets.
The authors identify and address three critical bottlenecks. First, they tackle the issue of information leakage. In traditional Masked Autoencoders (MAE), the model often learns to reconstruct masked regions by exploiting surrounding context, leading to suboptimal representations. DOS mitigates this by performing semantic relevance softmap distillation exclusively on observable (unmasked) points. This strategy prevents the model from relying on leaked information from masked areas and provides a much richer, continuous supervisory signal compared to traditional discrete token-to-prototype assignments.
Second, the paper addresses the “long-tail” problem of semantic distribution. In 3D scenes, certain classes like roads or sidewalks are ubiquitous, while others like pedestrians or cyclists are rare. To handle this, the authors propose “Zipfian Prototypes.” By leveraging the principle of Zipf’s Law—where a few elements occur very frequently and many occur rarely—the framework mimics the natural distribution of the real world. To implement this, they introduce the “Zipf-Sinkhorn” algorithm, a modified version of the Sinkhorn-Knopp algorithm. This algorithm enforces a power-law prior over prototype usage, effectively modulating the sharpness of the target softmap and ensuring that the model learns robust features for both frequent and infrequent classes.
The experimental validation is extensive and impressive. DOS achieves state-of-the-art (SOTA) performance across a wide array of prestigious benchmarks, including nuScenes, Waymo, SemanticKITTI, ScanNet, and ScanNet200. The framework excels in both semantic segmentation and 3D object detection tasks. Crucially, these superior results are achieved without any reliance on extra annotated data or external supervision, proving that DOS is a highly scalable and effective paradigm for learning robust 3D representations from raw, unlabeled point clouds. The work significantly advances the field by providing a mathematically grounded approach to handling the complexities of 3D spatial data.
Comments & Academic Discussion
Loading comments...
Leave a Comment