POLO: Phase-Only Localization in Uplink Distributed MIMO Systems
We propose a low-complexity localization framework for uplink distributed MIMO (D-MIMO) systems, targeting the challenge of minimizing the highly spiky maximum-likelihood (ML) cost function that arises in sparsely deployed phasecoherent access points (APs) with narrowband transmission. In such systems, ML-based localization typically relies on dense grid search, incurring prohibitive computational complexity. To address this, we introduce phase-only localization (POLO), an approach that leverages differential carrier-phase measurements from selected APs to generate a compact set of candidate user positions. The ML cost function is then evaluated only at these candidates, reducing complexity significantly. A key challenge is to devise an AP selection mechanism that reduces the number of candidate points while maintaining reliable coverage. We propose two variants: POLO-I, which selects three APs to provide closed-form candidate positions with low computational cost, and POLO-II, which selects four APs using an alternative strategy that enhances coverage at marginally higher runtime. Comprehensive analytical and simulation results show that POLO achieves a favorable coverage-complexity trade-off, reducing cost by orders of magnitude relative to exhaustive grid search with only marginal loss in coverage. By characterizing this tradeoff under diverse AP configurations, we also provide practical guidelines for selecting between POLO-I and POLO-II depending on latency and coverage requirements.
💡 Research Summary
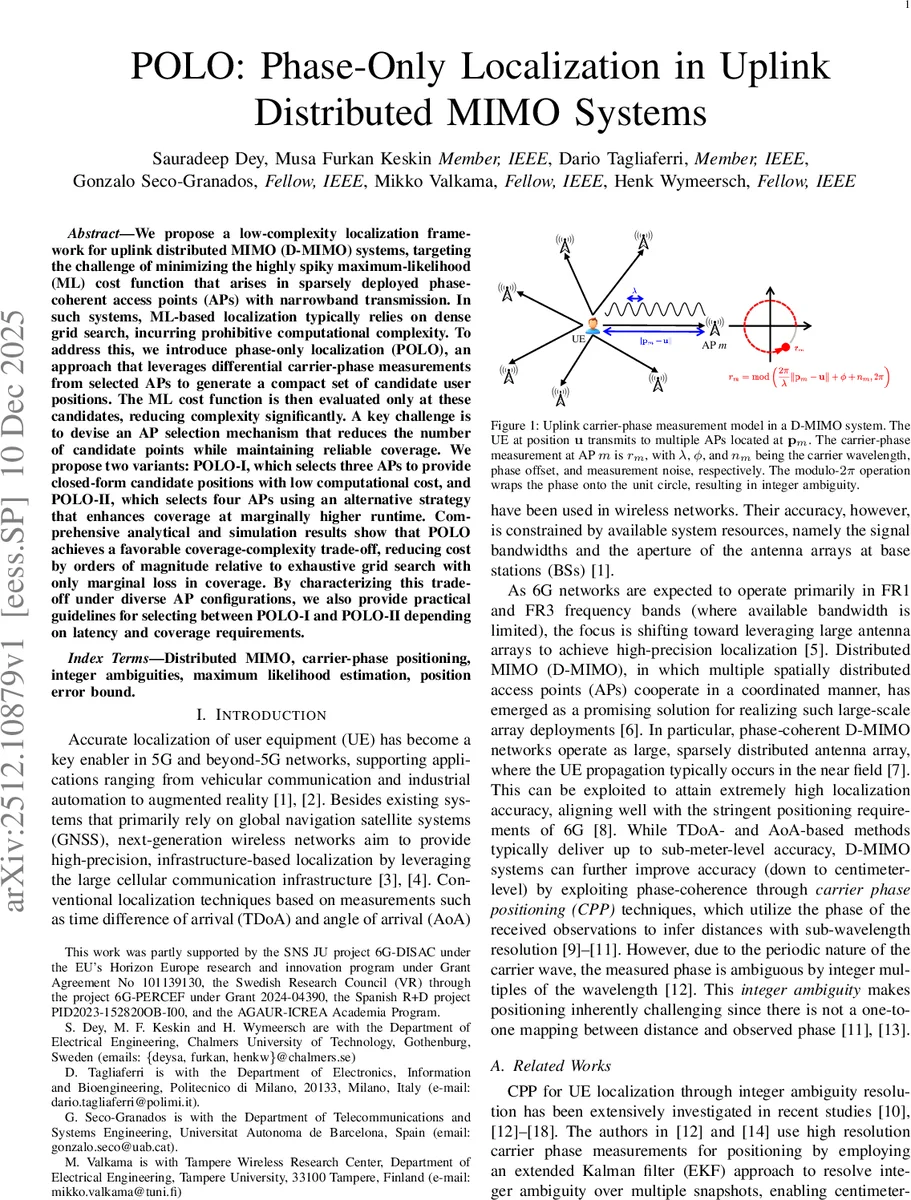
The paper addresses the problem of high‑complexity maximum‑likelihood (ML) positioning in uplink phase‑coherent distributed MIMO (D‑MIMO) systems, where a single‑antenna user equipment (UE) transmits a narrowband pilot on a single sub‑carrier to a set of sparsely deployed, phase‑synchronized access points (APs). In such settings the ML cost function, built directly from the raw complex baseband observations, is extremely spiky and non‑convex because the APs sample the spatial domain only sparsely. Conventional solutions therefore resort to exhaustive grid search (EGS) over a dense 2‑D grid, which incurs prohibitive computational load and is highly sensitive to grid resolution and initialization. Moreover, the measured carrier phase is wrapped modulo 2π, introducing an unknown integer ambiguity for each AP, which further multiplies the number of possible UE locations.
The authors propose Phase‑Only Localization (POLO), a low‑complexity framework that sidesteps both the spikiness of the ML surface and the integer‑ambiguity explosion by exploiting differential carrier‑phase measurements between carefully selected AP pairs. The key idea is that the phase difference between two APs eliminates the unknown UE phase offset and yields a linear relation between the distance difference (d_r – d_s) and the measured phase difference, up to an integer multiple of the wavelength and measurement noise. Geometrically, each differential phase defines a locus of possible UE positions that is a circle (or a line in the limit of zero integer offset). By intersecting two such loci obtained from two AP pairs, a finite set of candidate UE positions is obtained. The ML cost function is then evaluated only on this reduced candidate set, and the best candidate is refined with a few gradient‑descent iterations.
Two concrete instantiations of POLO are introduced:
-
POLO‑I selects three APs: one reference AP (r) and two secondary APs (s₁, s₂). The two differential phases Δr‑s₁ and Δr‑s₂ generate two circles whose intersection yields at most two candidate points. Because the intersection can be expressed in closed form, POLO‑I has negligible computational overhead and is ideal for latency‑critical applications. Its drawback is limited coverage: the geometry of the chosen AP triplet must be favorable (i.e., the circles intersect cleanly) otherwise the candidate set may be empty or the error may blow up.
-
POLO‑II selects four APs, forming two independent AP pairs. The first step computes candidate points from the intersection of the two circles defined by the first pair; this step generally yields multiple candidates and requires a numerical root‑finding routine. A second differential phase from the remaining pair is then used to prune or refine the candidates. POLO‑II therefore incurs higher runtime than POLO‑I but supports a much broader range of AP geometries and achieves higher localization coverage.
The authors provide a thorough analytical treatment of the Position Error Bound (PEB) for the selected AP subsets, showing that the PEB is tightly linked to the condition number of the geometry matrix formed by the AP coordinates. Regions where the condition number becomes large correspond to “high‑error zones” where the ML cost surface is especially spiky. By mapping these zones, the paper derives AP‑selection heuristics that minimize the size of high‑error regions, effectively balancing coverage and complexity.
Simulation results across several deployment scenarios (regular grids, random placements, clustered APs) confirm the theoretical findings. Compared with exhaustive grid search, POLO‑I reduces the number of likelihood evaluations by 2–3 orders of magnitude, achieving a 10–30× reduction in runtime while incurring less than a 5 % increase in mean positioning error. POLO‑II offers a 5–15× runtime reduction with an even smaller error penalty, and it maintains a high probability of successful localization (coverage) even when APs are not ideally spaced.
In summary, POLO demonstrates that, for phase‑coherent D‑MIMO systems, a single‑snapshot, single‑carrier measurement can be turned into a tractable positioning problem by (i) converting raw phases into differential phase constraints, (ii) generating a compact candidate set via simple geometric intersections, and (iii) applying the ML cost only on this set. This approach eliminates the need for multi‑snapshot integer‑ambiguity resolution, multi‑carrier processing, or massive antenna arrays, thereby offering a practical path toward real‑time, centimeter‑level positioning in future 5G/6G networks. The paper concludes with suggestions for future work, including extensions to non‑line‑of‑sight (NLoS) multipath environments, multi‑frequency operation, and hybrid data‑driven methods that could further accelerate candidate generation.
Comments & Academic Discussion
Loading comments...
Leave a Comment