📝 Original Info
- Title: SimWorld-Robotics: Synthesizing Photorealistic and Dynamic Urban Environments for Multimodal Robot Navigation and Collaboration
- ArXiv ID: 2512.10046
- Date: 2025-12-10
- Authors: Yan Zhuang, Jiawei Ren, Xiaokang Ye, Jianzhi Shen, Ruixuan Zhang, Tianai Yue, Muhammad Faayez, Xuhong He, Ziqiao Ma, Lianhui Qin, Zhiting Hu, Tianmin Shu
📝 Abstract
Recent advances in foundation models have shown promising results in developing generalist robotics that can perform diverse tasks in open-ended scenarios given multimodal inputs. However, current work has been mainly focused on indoor, household scenarios. In this work, we present SimWorld-Robotics (SWR), a simulation platform for embodied AI in large-scale, photorealistic urban environments. Built on Unreal Engine 5, SWR procedurally generates unlimited photorealistic urban scenes populated with dynamic elements such as pedestrians and traffic systems, surpassing prior urban simulations in realism, complexity, and scalability. It also supports multi-robot control and communication. With these key features, we build two challenging robot benchmarks: (1) a multimodal instruction-following task, where a robot must follow vision-language navigation instructions to reach a destination in the presence of pedestrians and traffic; and (2) a multi-agent search task, where two robots must communicate to cooperatively locate and meet each other. Unlike existing benchmarks, these two new benchmarks comprehensively evaluate a wide range of critical robot capacities in realistic scenarios, including (1) multimodal instructions grounding, (2) 3D spatial reasoning in large environments, (3) safe, long-range navigation with people and traffic, (4) multi-robot collaboration, and (5) grounded communication. Our experimental results demonstrate that stateof-the-art models, including vision-language models (VLMs), struggle with our tasks, lacking robust perception, reasoning, and planning abilities necessary for urban environments.
💡 Deep Analysis
Deep Dive into SimWorld-Robotics: Synthesizing Photorealistic and Dynamic Urban Environments for Multimodal Robot Navigation and Collaboration.
Recent advances in foundation models have shown promising results in developing generalist robotics that can perform diverse tasks in open-ended scenarios given multimodal inputs. However, current work has been mainly focused on indoor, household scenarios. In this work, we present SimWorld-Robotics (SWR), a simulation platform for embodied AI in large-scale, photorealistic urban environments. Built on Unreal Engine 5, SWR procedurally generates unlimited photorealistic urban scenes populated with dynamic elements such as pedestrians and traffic systems, surpassing prior urban simulations in realism, complexity, and scalability. It also supports multi-robot control and communication. With these key features, we build two challenging robot benchmarks: (1) a multimodal instruction-following task, where a robot must follow vision-language navigation instructions to reach a destination in the presence of pedestrians and traffic; and (2) a multi-agent search task, where two robots must comm
📄 Full Content
SimWorld-Robotics: Synthesizing Photorealistic and
Dynamic Urban Environments for Multimodal Robot
Navigation and Collaboration
Yan Zhuang1
Jiawei Ren2∗
Xiaokang Ye2∗
Jianzhi Shen3
Ruixuan Zhang3
Tianai Yue3
Muhammad Faayez3
Xuhong He4
Xiyan Zhang3
Ziqiao Ma5
Lianhui Qin2‡
Zhiting Hu2‡
Tianmin Shu3‡
1University of Virginia
2UC San Diego
3Johns Hopkins University
4Carnegie Mellon University
5University of Michigan
Abstract
Recent advances in foundation models have shown promising results in
developing generalist robotics that can perform diverse tasks in open-ended
scenarios given multimodal inputs.
However, current work has been mainly
focused on indoor, household scenarios.
In this work, we present SimWorld-
Robotics (SWR), a simulation platform for embodied AI in large-scale,
photorealistic urban environments. Built on Unreal Engine 5, SWR procedurally
generates unlimited photorealistic urban scenes populated with dynamic elements
such as pedestrians and traffic systems, surpassing prior urban simulations in
realism, complexity, and scalability.
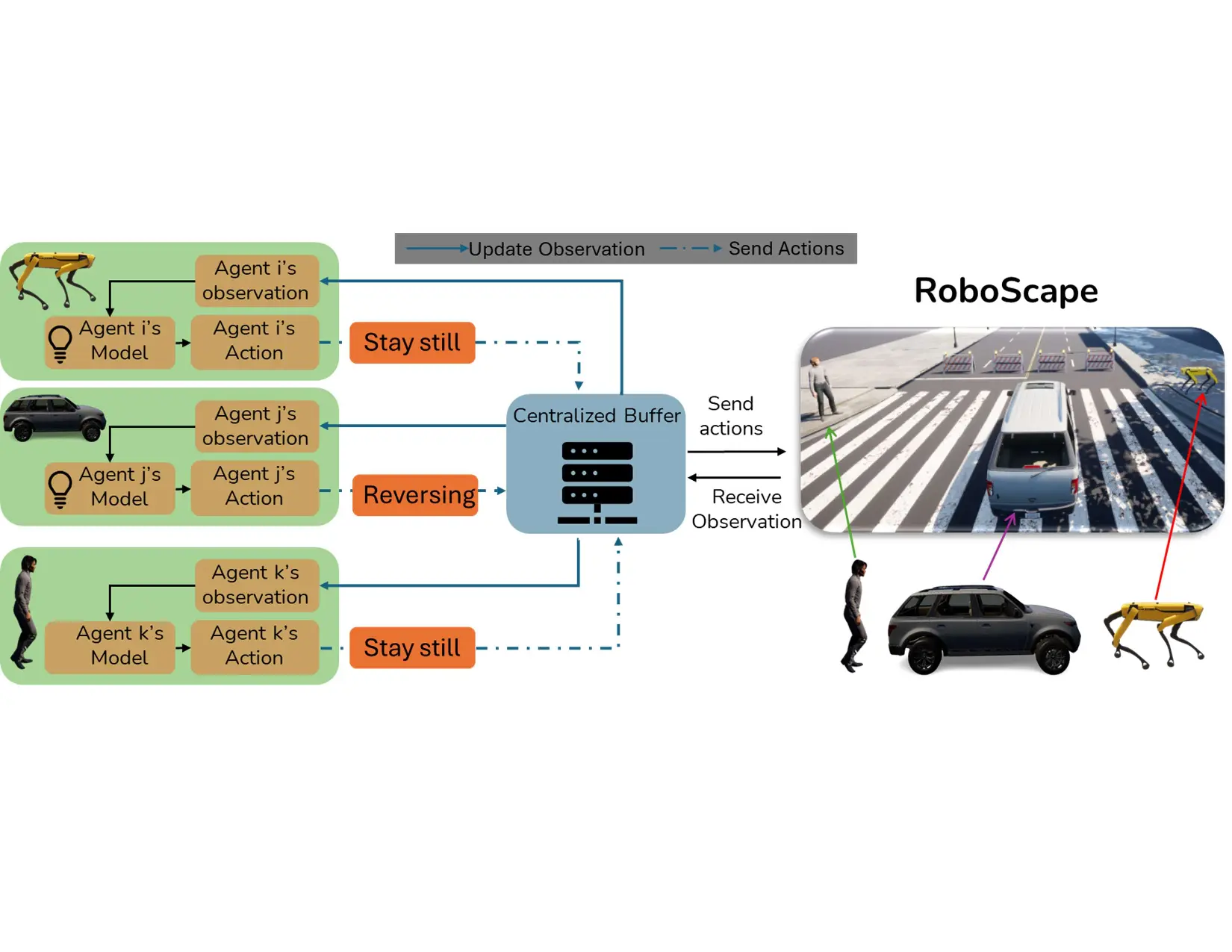
It also supports multi-robot control and
communication.
With these key features, we build two challenging robot
benchmarks: (1) a multimodal instruction-following task, where a robot must
follow vision-language navigation instructions to reach a destination in the
presence of pedestrians and traffic; and (2) a multi-agent search task, where two
robots must communicate to cooperatively locate and meet each other. Unlike
existing benchmarks, these two new benchmarks comprehensively evaluate a wide
range of critical robot capacities in realistic scenarios, including (1) multimodal
instructions grounding, (2) 3D spatial reasoning in large environments, (3) safe,
long-range navigation with people and traffic, (4) multi-robot collaboration, and
(5) grounded communication. Our experimental results demonstrate that state-
of-the-art models, including vision-language models (VLMs), struggle with our
tasks, lacking robust perception, reasoning, and planning abilities necessary for
urban environments.
Project website: SimWorld-Robotics
1
Introduction
There has been tremendous progress in engineering general-purpose robotics that can follow human
instructions and perform open-ended tasks [2, 28, 15, 27, 46], thanks to the advances in robot
foundation models. Training these models requires a large amount of data, much of which can be
generated in high-fidelity embodied simulators, such as Habitat 3 [40], RoboTHOR [10], TDW [14],
VirtualHome [38], Virtual Community [61] and BEHAVIOR [27]. They can also be systematically
evaluated in diverse scenarios created in these simulators. However, current embodied simulators for
robotics have been focused on tabletop [35, 58, 34, 22, 59] or household tasks [48, 27, 26, 47, 46].
In this work, we want to study how to create a realistic and scalable embodied simulator for outdoor
robotics tasks.
* Equal contribution. ‡ Equal advising.
39th Conference on Neural Information Processing Systems (NeurIPS 2025).
arXiv:2512.10046v3 [cs.AI] 23 Jan 2026
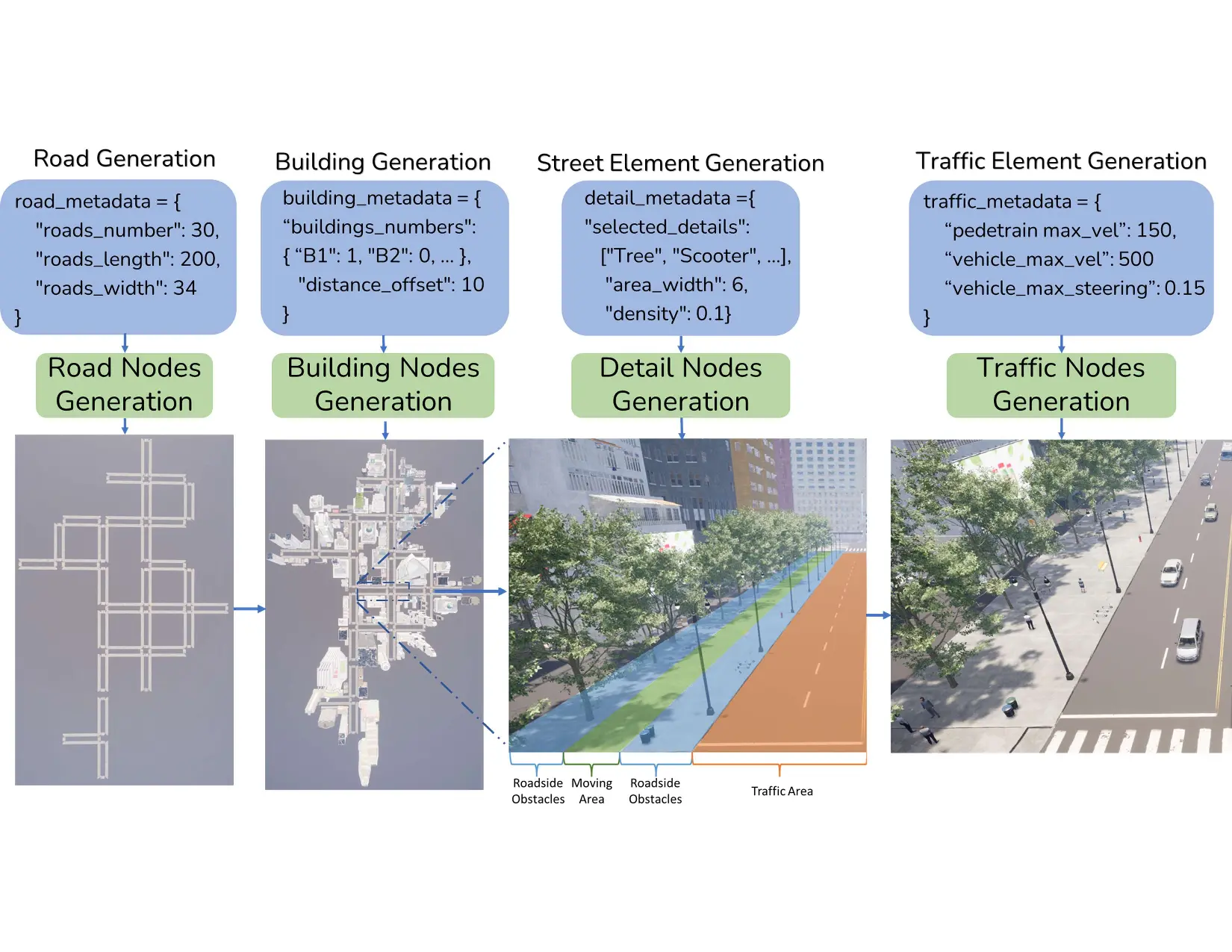
Figure 1: Overview of SimWorld Robotics (SWR). Built upon Unreal Engine 5, SWR is a
simulation platform for large-scale, photorealistic, and dynamic urban environments.
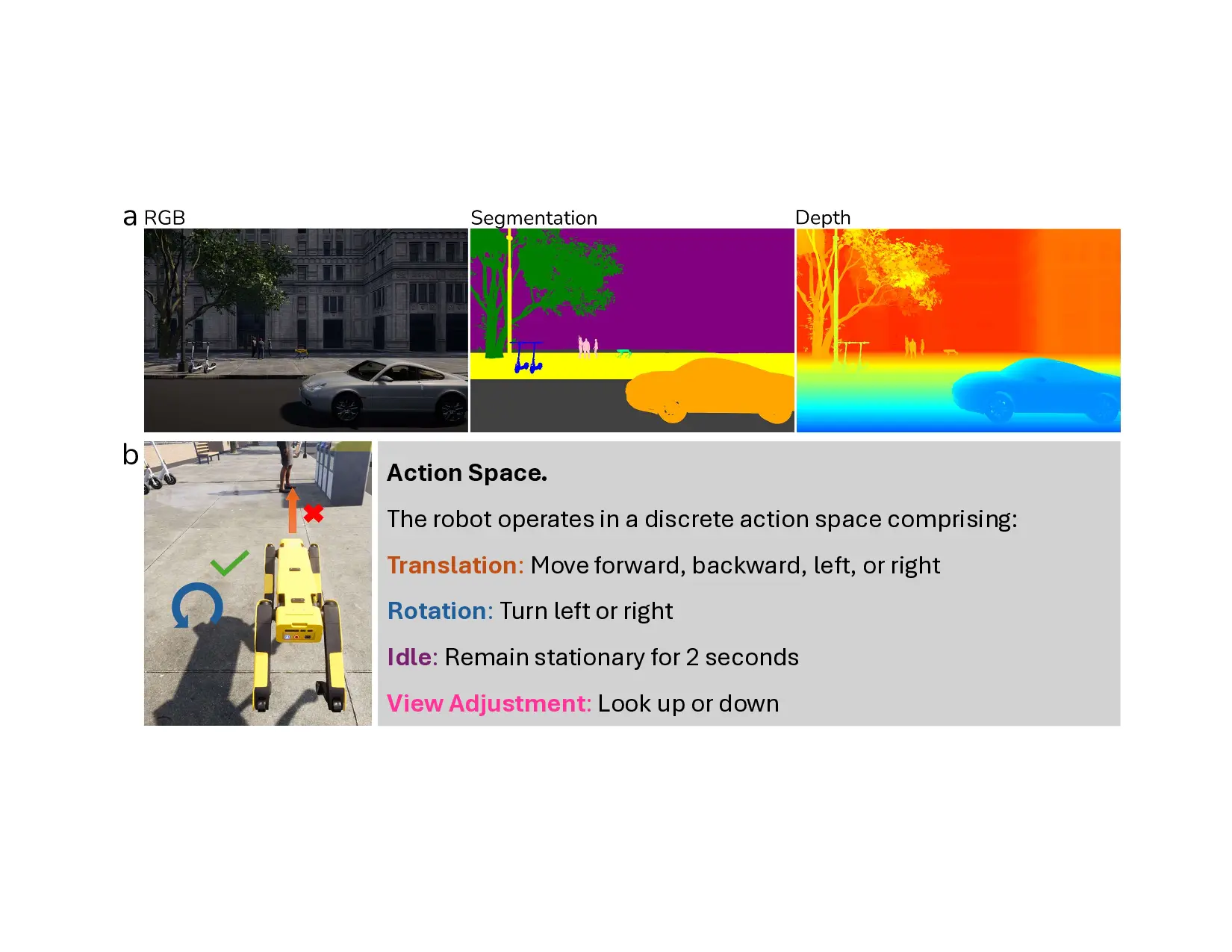
It offers
diverse high-fidelity building and object assets, supports embodied agents with rich action spaces,
includes a background traffic system powered by city-scale waypoint generation, and enables
comprehensive city procedural generation.
Compared to indoor scenarios, robotics in outdoor environments, in particular, large urban
environments, introduces additional challenges, such as (1) 3D perception, spatial reasoning and
grounding in large environments; (2) safe navigation in dynamic scenes with people and traffic; (3)
long-range spatial memory; and (4) multi-agent collaboration and communication in task.
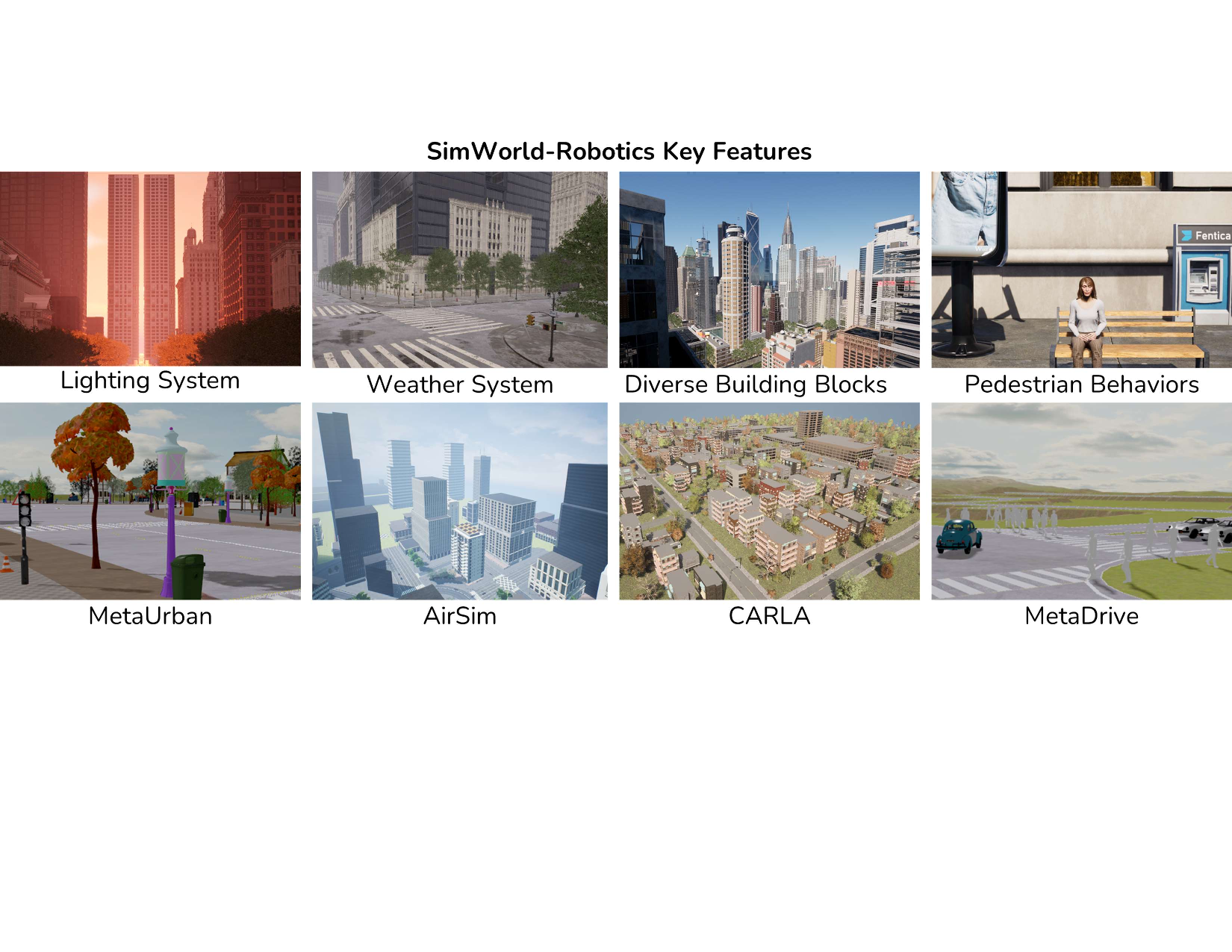
There have been urban simulators developed in recent years.
However, to address the critical
challenges faced by real-world robotics in urban environments, they lack the necessary realism,
customizability, scalability, and versatility. For instance, well-known simulators such as AirSim [45],
CARLA [12] mainly focus on autonomous driving domains.
While it supports some manual
customization to the provided city environments, it does not support procedural city environment
generation.
It also does not support the flexible control of embodied agents (such as mobile
robots or pedestrians) other than vehicles. More recent city simulators, such as MetaDrive [29],
MetaUrban [56], significantly improve the scalability. However, the simulated environments still
lack photorealism as shown in Figure 2.
Therefore, we introduce SimWorld-Robotics (SWR), a new embodied AI simulation platform for
large-scale, photorealistic, and dynamic urban environments.
As illustrated in Figure 1, SWR
offers diverse high-fidelity building and object assets, multiple types of embodied agents with rich
action spaces, a waypoint-based background traffic system, and a c
…(Full text truncated)…
📸 Image Gallery
Reference
This content is AI-processed based on ArXiv data.