vEDGAR -- Can CARLA Do HiL?
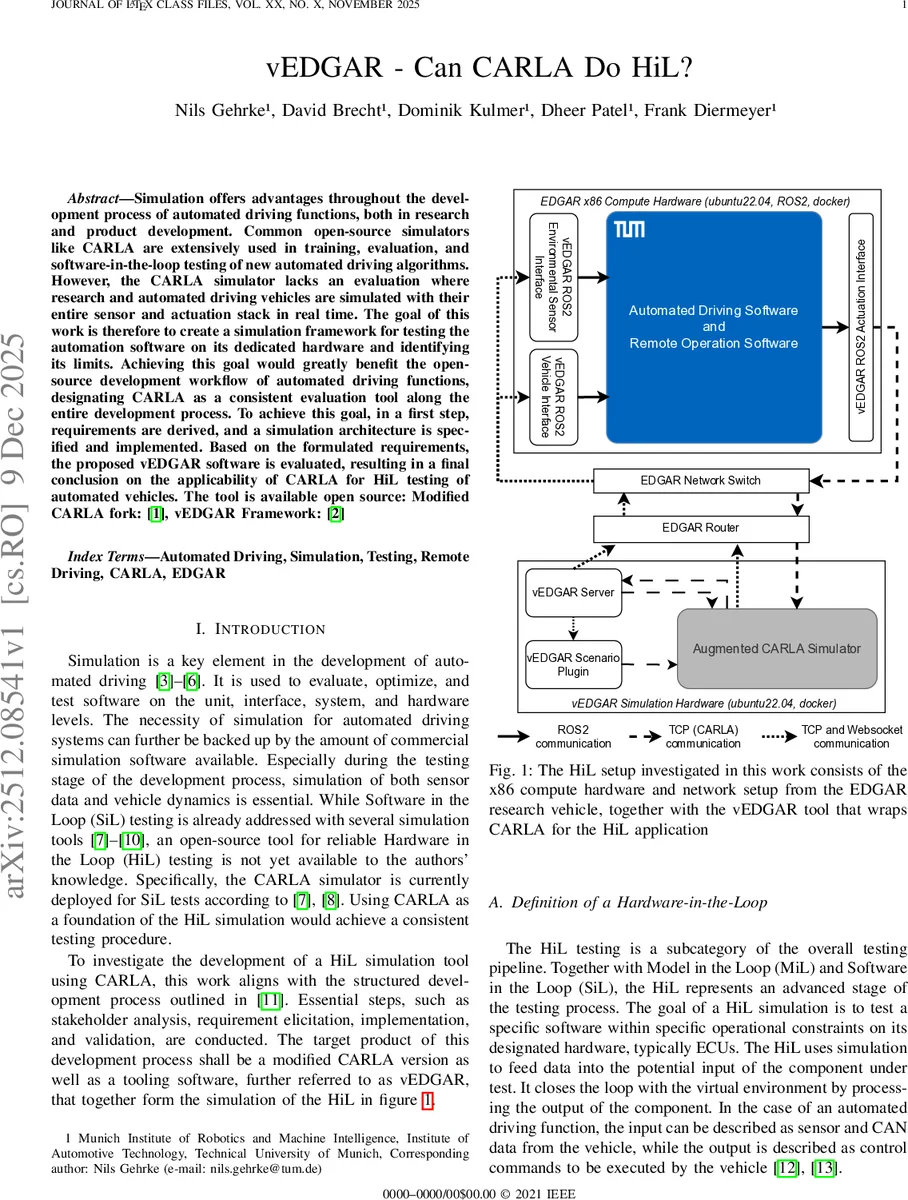
Simulation offers advantages throughout the development process of automated driving functions, both in research and product development. Common open-source simulators like CARLA are extensively used in training, evaluation, and software-in-the-loop testing of new automated driving algorithms. However, the CARLA simulator lacks an evaluation where research and automated driving vehicles are simulated with their entire sensor and actuation stack in real time. The goal of this work is therefore to create a simulation framework for testing the automation software on its dedicated hardware and identifying its limits. Achieving this goal would greatly benefit the open-source development workflow of automated driving functions, designating CARLA as a consistent evaluation tool along the entire development process. To achieve this goal, in a first step, requirements are derived, and a simulation architecture is specified and implemented. Based on the formulated requirements, the proposed vEDGAR software is evaluated, resulting in a final conclusion on the applicability of CARLA for HiL testing of automated vehicles. The tool is available open source: Modified CARLA fork: https://github.com/TUMFTM/carla, vEDGAR Framework: https://github.com/TUMFTM/vEDGAR
💡 Research Summary
The rapid advancement of autonomous driving technology necessitates robust simulation environments throughout the entire development lifecycle, from initial research to final product deployment. While widely-used open-source simulators like CARLA have become industry standards for training and Software-in-the-Loop (SIL) testing, they possess a significant limitation: the inability to simulate the entire sensor and actuation stack in real-time on dedicated hardware. This gap prevents developers from evaluating how autonomous software performs when subjected to the physical constraints, latencies, and real-time processing requirements of actual automotive hardware.
To address this critical deficiency, this paper introduces “vEDGAR,” a novel simulation framework designed to bridge the gap between software-centric simulation and Hardware-in-the-Loop (HiL) testing. The primary objective of this work is to transform CARLA into a consistent evaluation tool capable of testing automation software on its intended dedicated hardware, thereby identifying the operational limits of the hardware-software integration.
The research methodology follows a structured approach: first, the authors derived specific technical requirements necessary for HiL-capable simulation. Second, a specialized simulation architecture was specified and implemented to meet these requirements. A key technical contribution of this work is the development of a “Modified CARLA fork,” which incorporates essential changes to the original CARLA codebase to support real-time hardware interfacing. Finally, the proposed vEDGAR framework was rigorously evaluated to determine the applicability of CARLA for HiL testing of autonomous vehicles.
The significance of vEDGAR lies in its potential to unify the autonomous driving development pipeline. By enabling a seamless transition from algorithm training in virtual environments to hardware-level validation, vEDGAR allows for the identification of critical failure points related to hardware latency and sensor-actuator synchronization that are invisible in traditional SIL environments. This integration promotes a more reliable and cost-effective development workflow. Furthermore, the authors have made both the modified CARLA fork and the vEDGAR framework available as open-source projects, empowering the global research community to advance the state-of-the-art in hardware-integrated autonomous driving simulation.
Comments & Academic Discussion
Loading comments...
Leave a Comment