Fitts' List Revisited: An Empirical Study on Function Allocation in a Two-Agent Physical Human-Robot Collaborative Position/Force Task
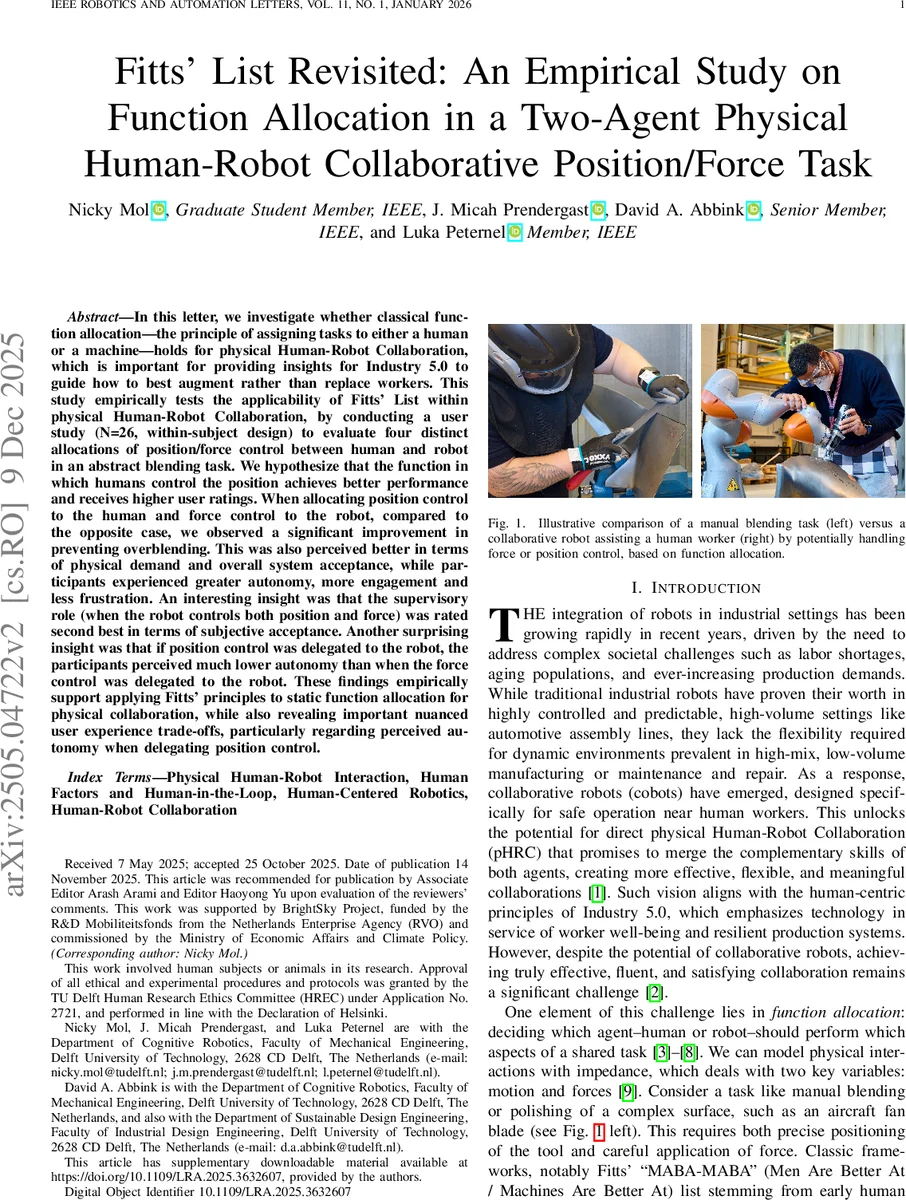
In this letter, we investigate whether classical function allocation-the principle of assigning tasks to either a human or a machine-holds for physical Human-Robot Collaboration, which is important for providing insights for Industry 5.0 to guide how to best augment rather than replace workers. This study empirically tests the applicability of Fitts’ List within physical Human-Robot Collaboration, by conducting a user study (N=26, within-subject design) to evaluate four distinct allocations of position/force control between human and robot in an abstract blending task. We hypothesize that the function in which humans control the position achieves better performance and receives higher user ratings. When allocating position control to the human and force control to the robot, compared to the opposite case, we observed a significant improvement in preventing overblending. This was also perceived better in terms of physical demand and overall system acceptance, while participants experienced greater autonomy, more engagement and less frustration. An interesting insight was that the supervisory role (when the robot controls both position and force) was rated second best in terms of subjective acceptance. Another surprising insight was that if position control was delegated to the robot, the participants perceived much lower autonomy than when the force control was delegated to the robot. These findings empirically support applying Fitts’ principles to static function allocation for physical collaboration, while also revealing important nuanced user experience trade-offs, particularly regarding perceived autonomy when delegating position control.
💡 Research Summary
The paper investigates whether the classic function‑allocation principle known as Fitts’ “MABA‑MABA” list—humans excel at perception, judgment and adaptability while machines excel at speed, consistent force and repeatable precision—holds for physical human‑robot collaboration (pHRC), a key concern for Industry 5.0. To this end, the authors designed an experimental blending task that requires both precise positioning of a tool tip and controlled downward force to remove “damage” patches on a visual display. The task was implemented on a 7‑DOF KUKA LBR iiwa robot equipped with a force/torque sensor, a custom handle, and a large monitor that provides real‑time visual feedback on removal progress and over‑blending errors.
Twenty‑six healthy participants (22–42 years, 4 female, 22 male) performed the task under four static allocation conditions in a within‑subject design, with order balanced by a Latin square. The conditions were: HH (human controls both position and force), HR (human controls position, robot controls force), RH (robot controls position, human controls force), and RR (robot controls both; human supervises and can intervene). Position control was realized by setting translational stiffness Kt to 0 N/m (free) or 5000 N/m (rigid guidance) depending on the condition; force control used a capped range of 5 N–40 N. Each condition comprised five trials of identical difficulty, and participants received a brief 2‑minute familiarization before each condition.
Objective performance metrics were task completion time and the number of over‑blending incidents (applying force where no damage existed, which created new “damage”). Subjective metrics included NASA‑TLX workload, Van der Laan usefulness and satisfaction scores, and self‑reported autonomy, engagement, and competence. Data were first tested for normality; parametric RM‑ANOVA or non‑parametric Friedman tests were applied as appropriate, with Holm‑Bonferroni correction for post‑hoc comparisons.
Key findings: (1) The HR condition significantly reduced over‑blending compared with RH (p < 0.01) and yielded a ~12 % reduction in completion time. (2) NASA‑TLX scores were lowest for HR, indicating the least perceived physical demand. (3) Subjectively, HR achieved the highest autonomy (4.3/5), engagement (4.5/5), and usefulness (4.6/5) ratings. The supervisory RR condition received the second‑best overall acceptance despite lower autonomy scores, suggesting users value reliable automation when it does not completely remove their sense of control. (4) RH scored markedly lower on autonomy (2.9/5) and elicited higher frustration, highlighting a perceived loss of control when the robot dictates the tool’s trajectory.
These results empirically confirm that Fitts’ principle extends to pHRC: allocating position to the human and force to the robot improves both objective efficiency and user experience. However, the study also uncovers nuanced trade‑offs: delegating position control to the robot can severely diminish perceived autonomy, even if force control remains human‑led. Consequently, designers of collaborative cobots should not only follow the MABA‑MABA guideline but also embed transparent supervisory interfaces that allow humans to intervene, thereby preserving a sense of agency. Future work is suggested to explore dynamic, context‑dependent allocation strategies and to validate the findings across other industrial tasks such as assembly, sanding, or polishing.
Comments & Academic Discussion
Loading comments...
Leave a Comment