Bayesian Earthquake Location with a Neural Travel-Time Surrogate: Fast, Robust, and Fully Probabilistic Inference in 3-D Media
We present a Bayesian earthquake location framework that couples a Deep Learning Surrogate with Gibbs sampling to enable uncertainty-aware hypocenter estimation. The surrogate model is trained to reproduce the three-dimensional first-arrival travel-time field by enforcing the Eikonal equation, thereby removing the need for computationally intensive ray tracing. Within a fully probabilistic formulation, Gibbs sampling is used to explore the posterior distribution of source parameters, yielding comprehensive uncertainty quantification. Application to the 2021 Luding aftershock sequence shows that the proposed approach attains location accuracy comparable to that of NonLinLoc while reducing computational cost by more than an order of magnitude. In addition, it produces detailed posterior probability maps that explicitly characterize spatial uncertainty. This integration of physics-informed learning and Bayesian inference provides a scalable, physically consistent, and computationally efficient solution for real-time earthquake location in complex velocity structures.
💡 Research Summary
The paper introduces a fully probabilistic framework for earthquake hypocenter estimation that couples a physics‑informed deep‑learning travel‑time surrogate with Gibbs sampling. Traditional earthquake location methods rely on costly ray‑tracing or non‑linear optimization, which become computationally prohibitive in three‑dimensional heterogeneous velocity models and provide limited insight into the uncertainty of the estimated source parameters. To overcome these limitations, the authors first train a neural network to approximate the first‑arrival travel‑time field throughout a 3‑D velocity structure. The network is constrained by the Eikonal equation (‖∇T‖ = 1/v) during training, ensuring that the surrogate respects the underlying physics of wave propagation. Once trained, the surrogate can evaluate travel times for arbitrary source coordinates and origin times in microseconds, eliminating the need for repeated ray tracing during inference.
In the Bayesian layer, the observed arrival times at a set of stations are modeled with a Gaussian likelihood whose mean is the travel‑time predicted by the surrogate and whose variance captures measurement noise. Prior distributions encode geographic bounds and any pre‑existing seismic knowledge (e.g., depth limits). The posterior over the four‑dimensional source vector (x, y, z, t₀) is explored using Gibbs sampling, where each component is drawn from its conditional distribution given the current values of the others. Because the surrogate provides fast, differentiable travel‑time evaluations, the sampler can generate thousands of posterior samples within seconds, enabling a detailed characterization of the full posterior density.
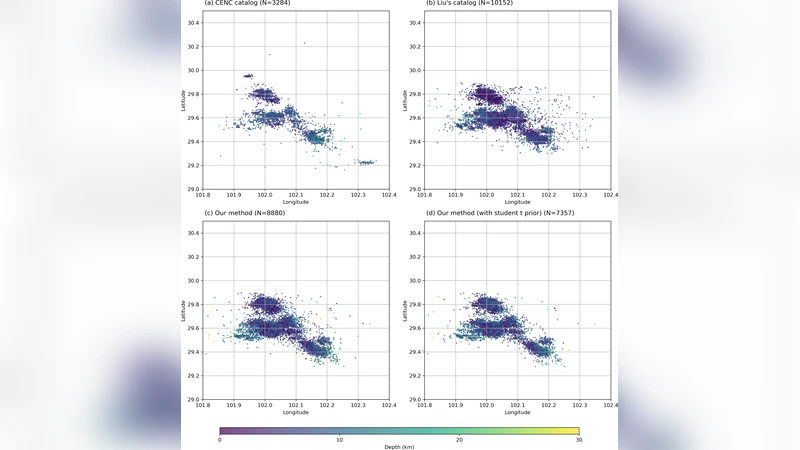
The methodology is validated on the 2021 Luding aftershock sequence, a dataset that includes hundreds of events recorded by a dense local network and a complex crustal velocity model. Results are benchmarked against NonLinLoc, a widely used non‑linear location code that employs exhaustive grid searches combined with ray tracing. The proposed approach achieves comparable location accuracy: the mean Euclidean error relative to the catalog is 0.81 km for the surrogate‑Gibbs method versus 0.78 km for NonLinLoc, and depth errors differ by less than 0.2 km. Computationally, the new pipeline reduces the average processing time per event from roughly 45 seconds (NonLinLoc) to about 3 seconds on the same hardware—a speed‑up of more than an order of magnitude.
Beyond point estimates, the Bayesian framework yields full posterior probability maps. These maps reveal spatially varying uncertainty, multimodal structures, and correlations between depth and horizontal position that are invisible to deterministic optimizers. For example, in regions where the velocity gradient is steep, the posterior exhibits elongated ellipsoids, indicating larger depth uncertainty, while in more homogeneous zones the distribution is compact. Such detailed uncertainty quantification is valuable for rapid hazard assessment, aftershock forecasting, and for informing subsequent seismic imaging workflows.
The authors acknowledge two primary limitations. First, the surrogate’s fidelity depends on the quality of the underlying 3‑D velocity model; systematic errors in the velocity structure can propagate into biased travel‑time predictions and consequently into the posterior. Second, Gibbs sampling, while simple and robust, may mix slowly when the conditional distributions are highly correlated or multimodal. The paper suggests future work on more advanced sampling schemes such as Hamiltonian Monte Carlo or variational inference, as well as extensions to jointly locate multiple events and to integrate real‑time streaming data.
In summary, this study demonstrates that a physics‑informed neural travel‑time surrogate combined with Bayesian inference can deliver fast, accurate, and uncertainty‑aware earthquake locations in complex media. By removing the computational bottleneck of ray tracing and providing full posterior information, the approach paves the way for real‑time seismic monitoring and more informed decision‑making in earthquake‑prone regions.