We study the computational power of the Full-Tilt model of motion planning, where slidable polyominos are moved maximally around a board by way of a sequence of directional ``tilts.'' We focus on the deterministic scenario in which the tilts constitute a repeated clockwise rotation. We show that general-purpose computation is possible within this framework by providing a direct and efficient simulation of space-bounded Turing machines in which one computational step of the machine is simulated per $O(1)$ rotations. We further show that the initial tape of the machine can be programmed by an initial tilt-sequence preceding the rotations. This result immediately implies new PSPACE-completeness results for the well-studied problems of \emph{occupancy} (deciding if a given board location can be occupied by a tile), \emph{vacancy} (deciding if a location can be emptied), \emph{relocation} (deciding if a tile can be moved from one location to another), and \emph{reconfiguration} (can a given board configuration be reconfigured into a second given configuration) that hold even for deterministically repeating tilt cycles such as rotations. All of our PSPACE-completeness results hold even when there is only a single domino in the system beyond singleton tiles. Following, we show that these results work in the Single-Step tilt model for larger constant cycles. We then investigate computational efficiency by showing a modification to implement a two-tape Turing machine in the Full-Tilt model and Systolic Arrays in the Single-Step model. Finally, we show a cyclic implementation for tilt-efficient Threshold Circuits.
Deep Dive into General Computation using Slidable Tiles with Deterministic Global Forces.
We study the computational power of the Full-Tilt model of motion planning, where slidable polyominos are moved maximally around a board by way of a sequence of directional ``tilts.’’ We focus on the deterministic scenario in which the tilts constitute a repeated clockwise rotation. We show that general-purpose computation is possible within this framework by providing a direct and efficient simulation of space-bounded Turing machines in which one computational step of the machine is simulated per $O(1)$ rotations. We further show that the initial tape of the machine can be programmed by an initial tilt-sequence preceding the rotations. This result immediately implies new PSPACE-completeness results for the well-studied problems of \emph{occupancy} (deciding if a given board location can be occupied by a tile), \emph{vacancy} (deciding if a location can be emptied), \emph{relocation} (deciding if a tile can be moved from one location to another), and \emph{reconfiguration} (can a given
General Computation using Slidable Tiles with Deterministic
Global Forces∗
Alberto Avila-Jimenez1, David Barreda1, Sarah-Laurie Evans1, Austin Luchsinger1, Aiden
Massie1, Robert Schweller1, Evan Tomai1, and Tim Wylie1
1University of Texas Rio Grande Valley
Abstract
We study the computational power of the Full-Tilt model of motion planning, where slidable poly-
ominos are moved maximally around a board by way of a sequence of directional “tilts.” We focus on
the deterministic scenario in which the tilts constitute a repeated clockwise rotation.
We show that
general-purpose computation is possible within this framework by providing a direct and efficient simu-
lation of space-bounded Turing machines in which one computational step of the machine is simulated
per O(1) rotations. We further show that the initial tape of the machine can be programmed by an
initial tilt-sequence preceding the rotations. This result immediately implies new PSPACE-completeness
results for the well-studied problems of occupancy (deciding if a given board location can be occupied
by a tile), vacancy (deciding if a location can be emptied), relocation (deciding if a tile can be moved
from one location to another), and reconfiguration (can a given board configuration be reconfigured into
a second given configuration) that hold even for deterministically repeating tilt cycles such as rotations.
All of our PSPACE-completeness results hold even when there is only a single domino in the system
beyond singleton tiles. Following, we show that these results work in the Single-Step tilt model for larger
constant cycles. We then investigate computational efficiency by showing a modification to implement a
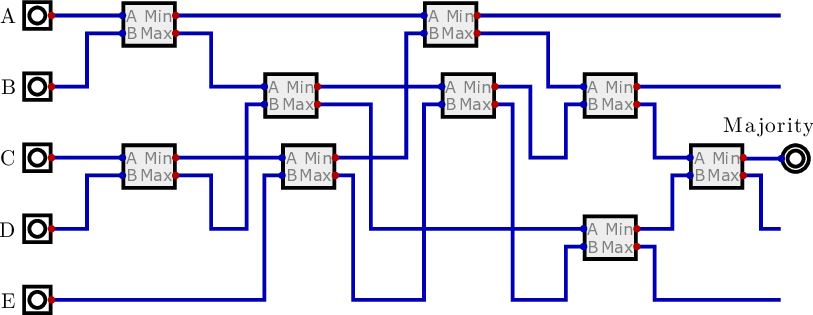
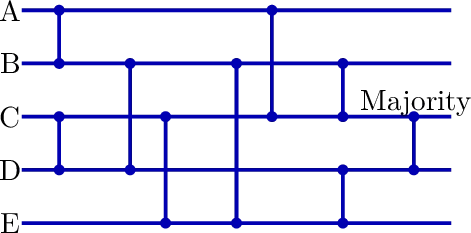
two-tape Turing machine in the Full-Tilt model and Systolic Arrays in the Single-Step model. Finally,
we show a cyclic implementation for tilt-efficient Threshold Circuits.
1
Introduction
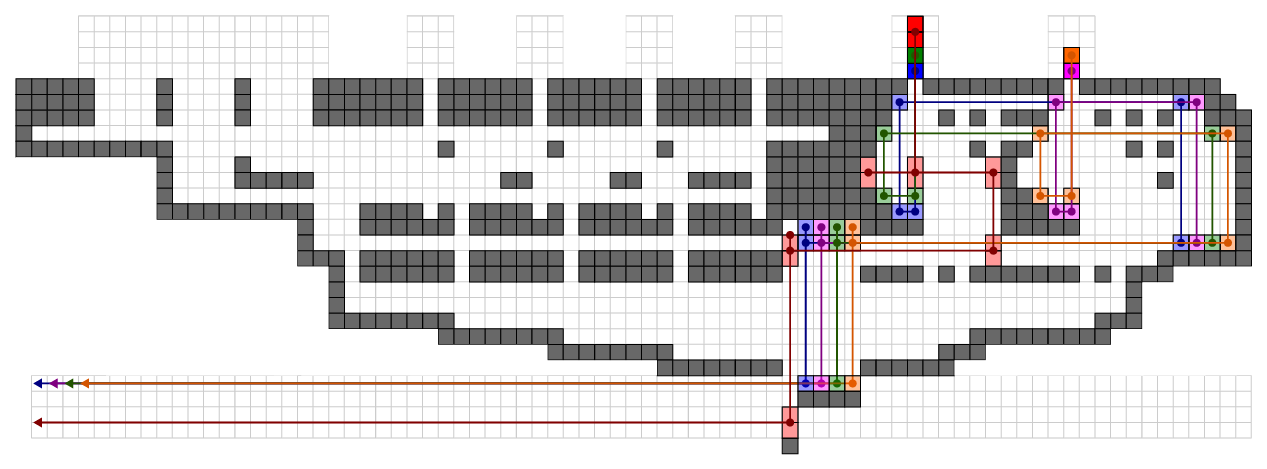
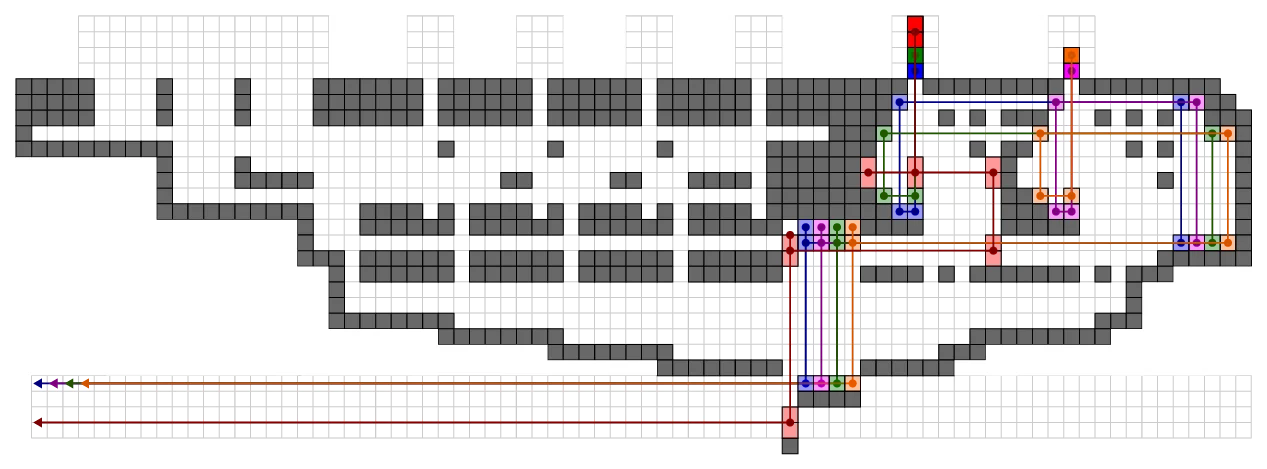
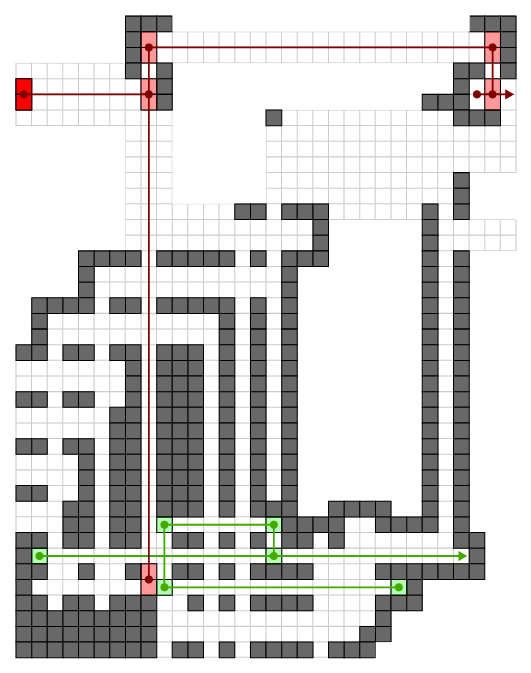
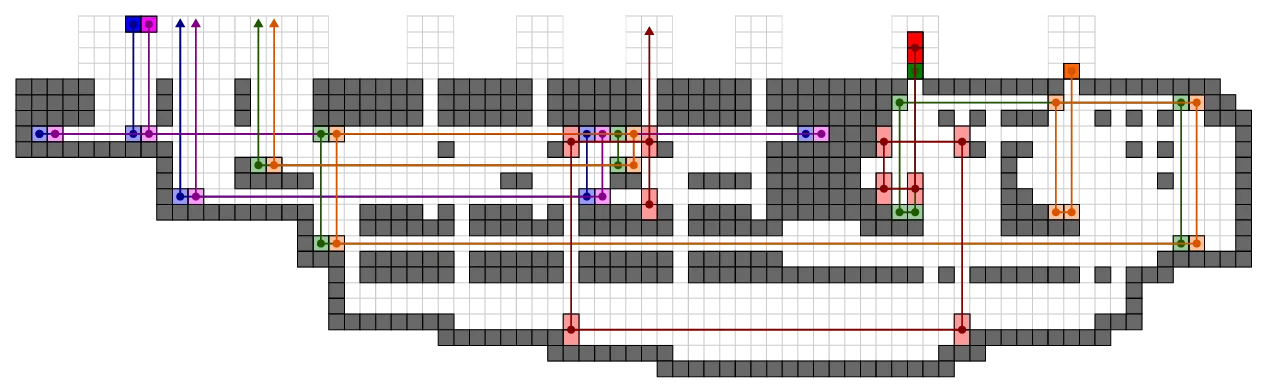
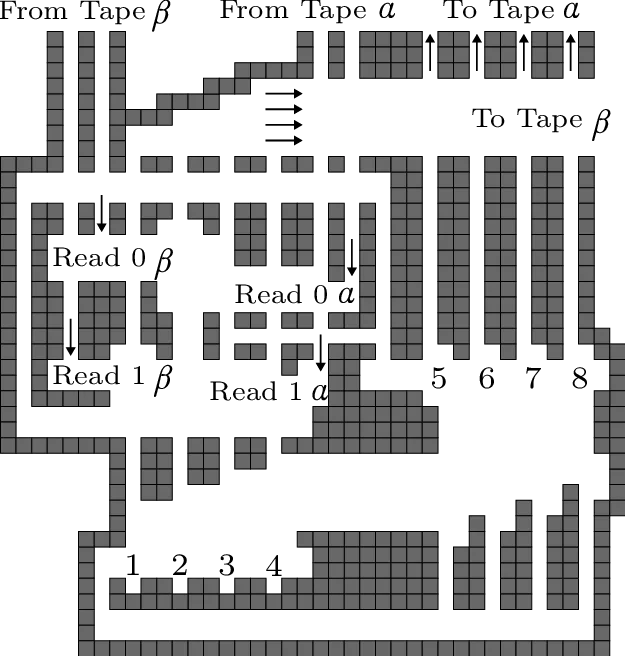
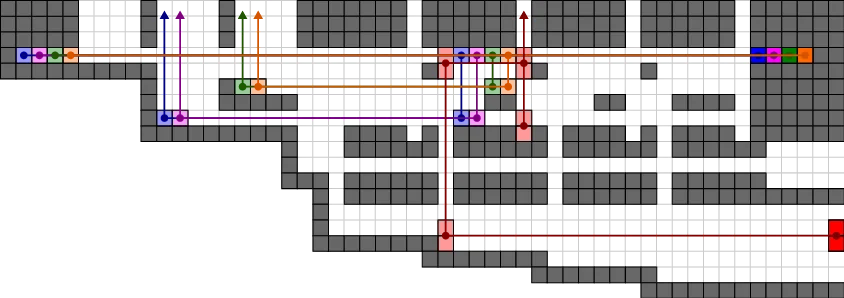
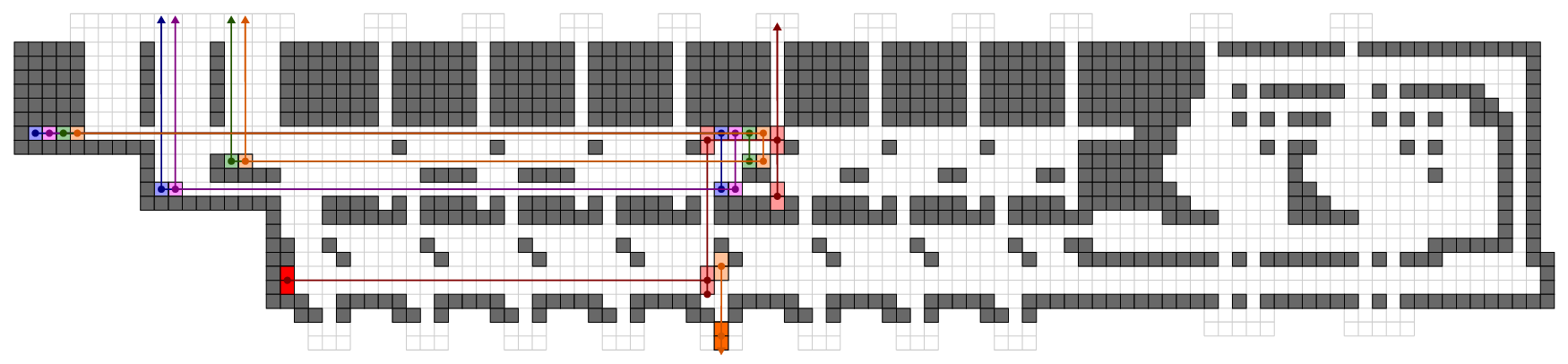
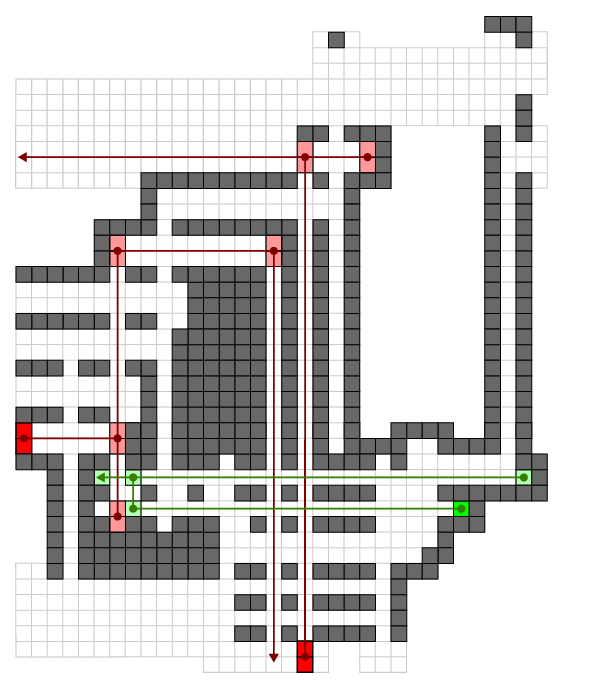
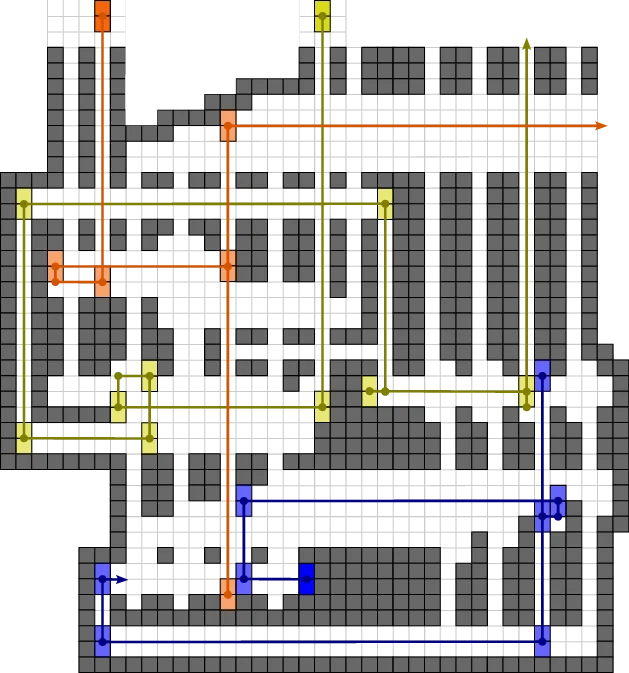
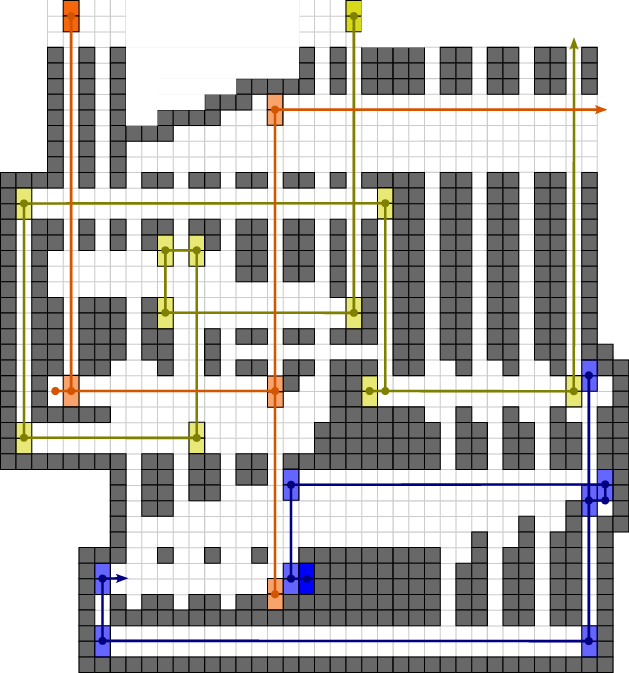
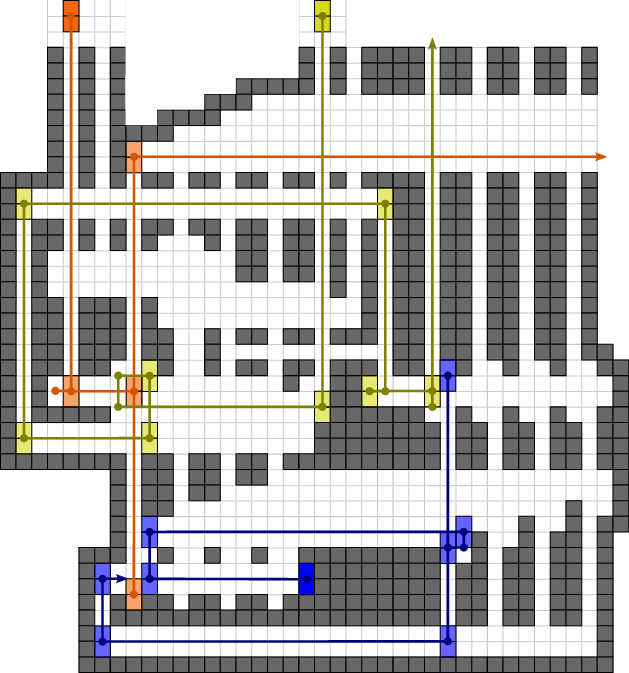
The “tilt” motion-planning model [8] is an elegant and simple model of multi-agent motion planning where
polyominos are moved based on external global controls such as gravity, magnetic fields, or light. The model
consists of a 2D grid board with a mix of fixed immovable walls and a collection of slidable polyominos
that move maximally based on directional tilt commands. By applying sequences of such directional tilts,
polyominos can be rearranged into different permutations, possibly simulating computation. If glues are
added, the initial polyominos can combine into larger shapes, and the tilt framework serves as a model of
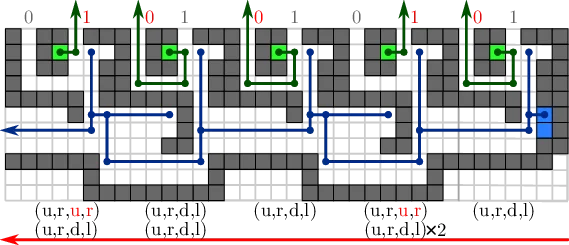
self-assembly. In this paper, we focus on one of the simplest variants of this model where the tilt sequence
is a simple repeated clockwise rotation (a rotational tilt sequence).
Motivation and Previous Work.
The study of Tilt is motivated by the fact that this extremely simple
and natural model of global control has extensive depth. For example, in terms of computation, dual-rail
logic devices and binary counters have been designed [6]. In terms of complexity, PSPACE-completeness
has been shown for various natural problems such as finding the minimum number of tilts to reconfigure a
board [6], or deciding if a configuration is reachable [4, 5] at all. In terms of self-assembly, work has been done
on designing boards to efficiently self-assemble target shapes in a pipelined manner [7], in parallel [29], in
∗This research was supported in part by National Science Foundation Grant CCF-2329918.
1
arXiv:2512.06574v1 [cs.CG] 6 Dec 2025
Model
Tilt
Relocation
Occupancy
Vacancy
Reconfig.
Poly.Poly.> 1
Ref.
Seq.
Size Count
FT
Det.
PSPACE-C PSPACE-C PSPACE-C
PSPACE-C
2
1
Thm. 2
General
PSPACE-C
PSPACE-C
PSPACE-C∗
PSPACE-C
1
0
[4, 14, 18]
SS
Det.
PSPACE-C PSPACE-C PSPACE-C
PSPACE-C
2
1
Cor. 2
General
PSPACE-C
PSPACE-C
PSPACE-C∗
PSPACE-C
1
0
[4, 14, 18]
Table 1: Summary of our results for the problems of relocation, occupancy, vacancy, and reconfiguration for
deterministically repeating tilt cycles. The new results are in bold. The dash lines follow from the other
results. “Poly. Size” is the maximum size of any polyomino, and “Poly. > 1 Count” is the number of
polyominos in the system that are not singletons. ∗This has not been formally proven, but was conjectured
[18] and is likely true based off [14].
Model
Cycle
Single
Multi-
Ref.
Cycle
Threshold
Ref.
Length
Tape TM
Tape TM
Length
Circuits
Full-Tilt
4
O(1)
O(1)
Thms. 1, 3
4
O(d)
Thm. 4
Single-Step
280
O(1)
O(T)
Cors. 1, 3
6
O(dw)
Cor. 5
Table 2: Summary of deterministic computation results related to other models in terms of the cycles required
for simulation. T refers to the length of the tape of the Turing Machine. For circuits, d and w are the depth
and width of the circuit, respectively.
3D [20], and in a universal manner where a single board can be programmed by a tilt sequence to construct
a selected shape or pattern from a general class [4, 5]. Despite its power, the simplicity of global control
permits applications at the macro, micro, and nano scale, including examples of large populat
…(Full text truncated)…
This content is AI-processed based on ArXiv data.