This paper presents a cutting-edge robotic inspection solution designed to automate quality control in automotive manufacturing. The system integrates a pair of collaborative robots, each equipped with a high-resolution camera-based vision system to accurately detect and localize surface and thread defects in aluminum high-pressure die casting (HPDC) automotive components. In addition, specialized lenses and optimized lighting configurations are employed to ensure consistent and high-quality image acquisition. The YOLO11n deep learning model is utilized, incorporating additional enhancements such as image slicing, ensemble learning, and bounding-box merging to significantly improve performance and minimize false detections. Furthermore, image processing techniques are applied to estimate the extent of the detected defects. Experimental results demonstrate real-time performance with high accuracy across a wide variety of defects, while minimizing false detections. The proposed solution is promising and highly scalable, providing the flexibility to adapt to various production environments and meet the evolving demands of the automotive industry.
Deep Dive into A Comprehensive Framework for Automated Quality Control in the Automotive Industry.
This paper presents a cutting-edge robotic inspection solution designed to automate quality control in automotive manufacturing. The system integrates a pair of collaborative robots, each equipped with a high-resolution camera-based vision system to accurately detect and localize surface and thread defects in aluminum high-pressure die casting (HPDC) automotive components. In addition, specialized lenses and optimized lighting configurations are employed to ensure consistent and high-quality image acquisition. The YOLO11n deep learning model is utilized, incorporating additional enhancements such as image slicing, ensemble learning, and bounding-box merging to significantly improve performance and minimize false detections. Furthermore, image processing techniques are applied to estimate the extent of the detected defects. Experimental results demonstrate real-time performance with high accuracy across a wide variety of defects, while minimizing false detections. The proposed solution
Quality control plays a crucial role in automotive manufacturing. Even minor defects introduced during production can result in significant performance issues and safety risks, emphasizing the importance of stringent quality inspections [1]. Traditionally, quality control processes in automotive production have been heavily dependent on skilled human operators to inspect components visually. This approach is not only costly and time-intensive but also susceptible to inconsistencies arising from operator fatigue and subjective decision-making [2]. In addition, manual inspection often struggles to meet the rising demands for precision and speed in modern manufacturing. Therefore, reliance on these traditional processes can hinder production efficiency and increase the risk of defective products reaching the market. To address these challenges, robotic solutions offer a promising alternative that delivers consistent, fast and accurate defect detection. By automating the inspection process, these advanced systems not only boost production efficiency, but also enhance the overall reliability of automotive manufacturing. The deployment of robotic systems in complex industrial environments poses several challenges, such as ensuring consistent image acquisition, optimizing speed, and achieving high detection accuracy across a wide range of defect types and sizes. Moreover, implementing artificial vision systems becomes difficult in cases of high geometric complexity of the parts. Several strategies have been proposed for quality control in automotive manufacturing. One approach introduces a hierarchical system that leverages simulated data for automated inspection [3]. Another study [4] presents an advanced machine learning technique to detect and classify aluminum surface defects, a task commonly applied in various manufacturing contexts and closely related to the automotive industry. In publications such as [2], [5], [6] Convolutional Neural Networks (CNNs) are used for defect identification. Deep learning techniques for visual inspection in automotive assembly lines are explored in [7], which employs methods such as object detection, semantic segmentation and anomaly detection. A comprehensive review of state-of-the-art object detection models for steel defect detection is provided in [8]. Recent advancements include the "You Only Look Once" (YOLO) [9] or "Single Shot MultiBox Detector" (SSD) [10] architectures, utilized in works such as, [11], [12], [13], [14],
and [15]. Specifically, [13] and [15] enhance the SSD and YOLO algorithms, respectively, to optimize the detection of small defects. Additionally, [16] proposes an illumination setup for optimal image acquisition, which is a crucial aspect of computer vision tasks that remains challenging due to the reflective nature of the components. However, all the mentioned approaches focus solely on computer vision and have yet to be integrated into a complete automated system for real-time quality inspection. Lastly, in [17], a mobile robot uses a specific sensor to measure flush and gap in car bodies, but it does not address the highly demanding task of detecting defects in aluminum HPDC parts.
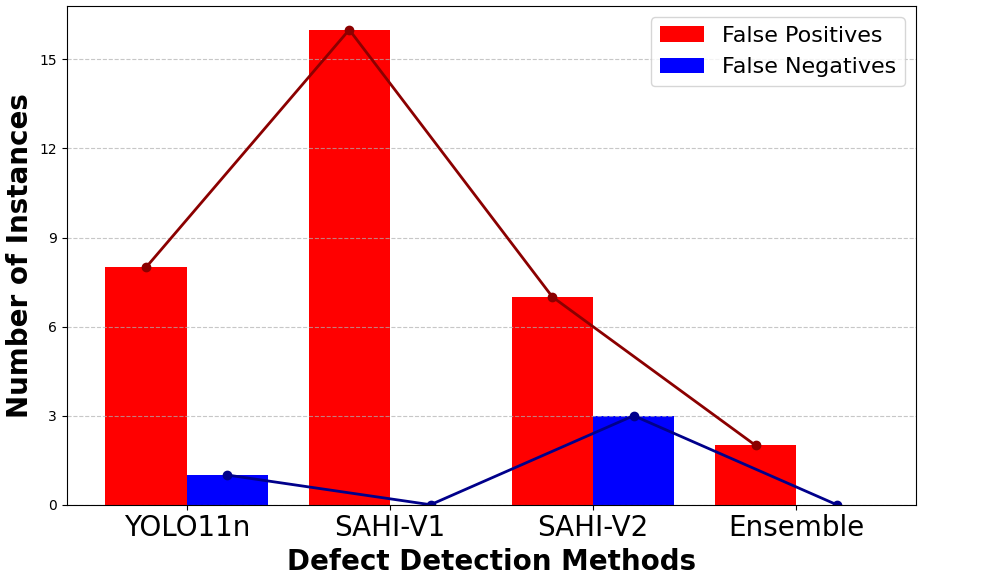
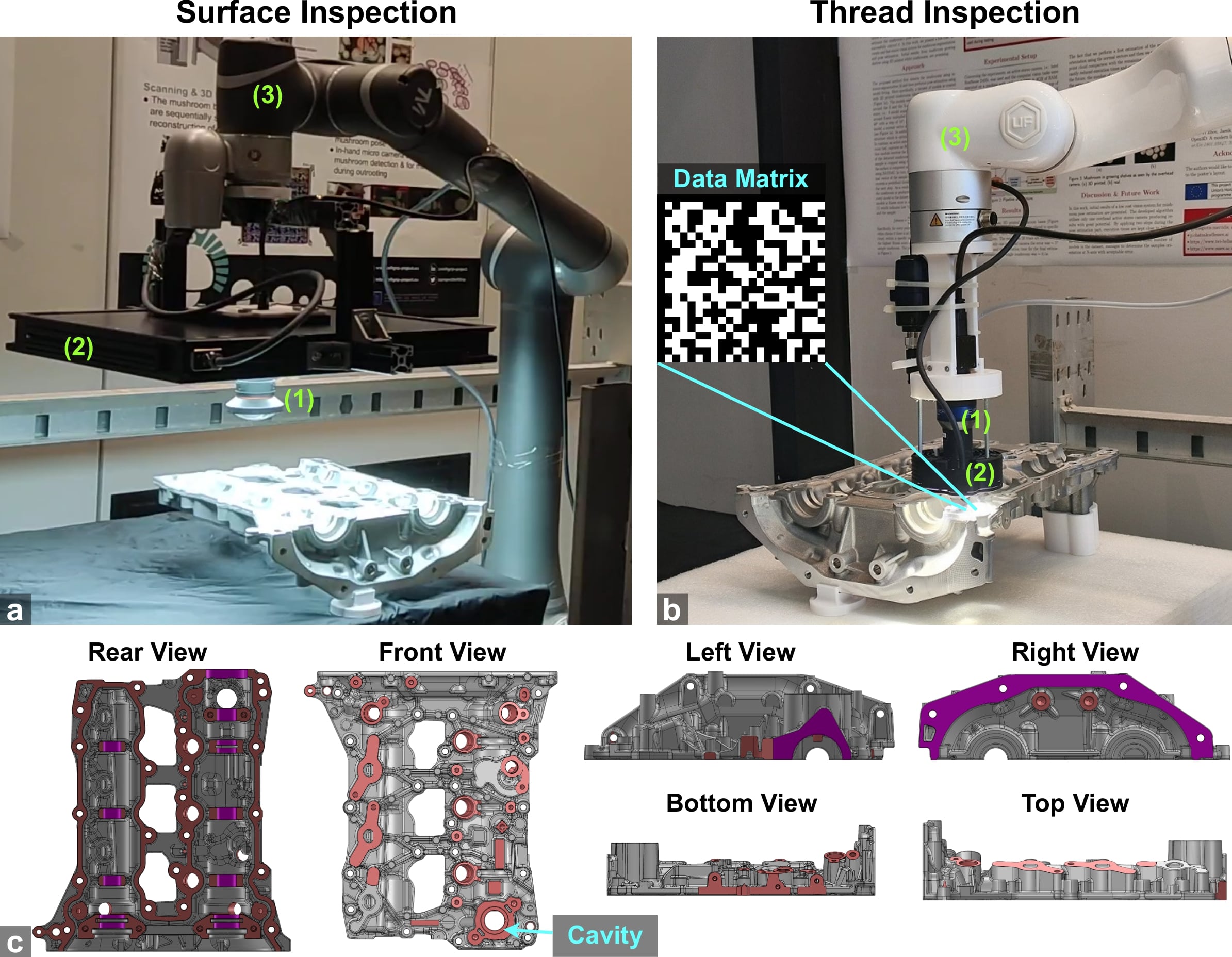
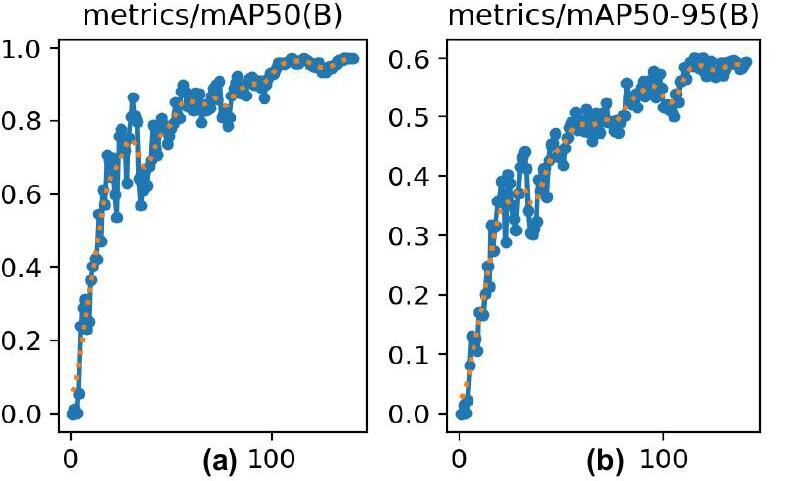
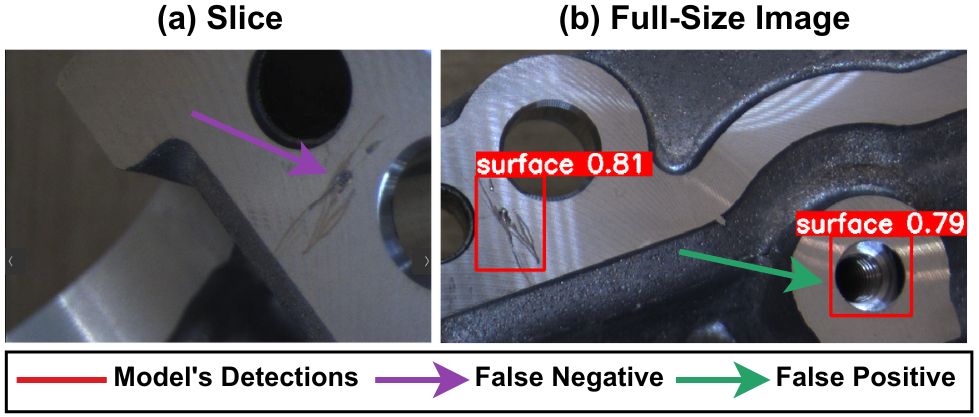
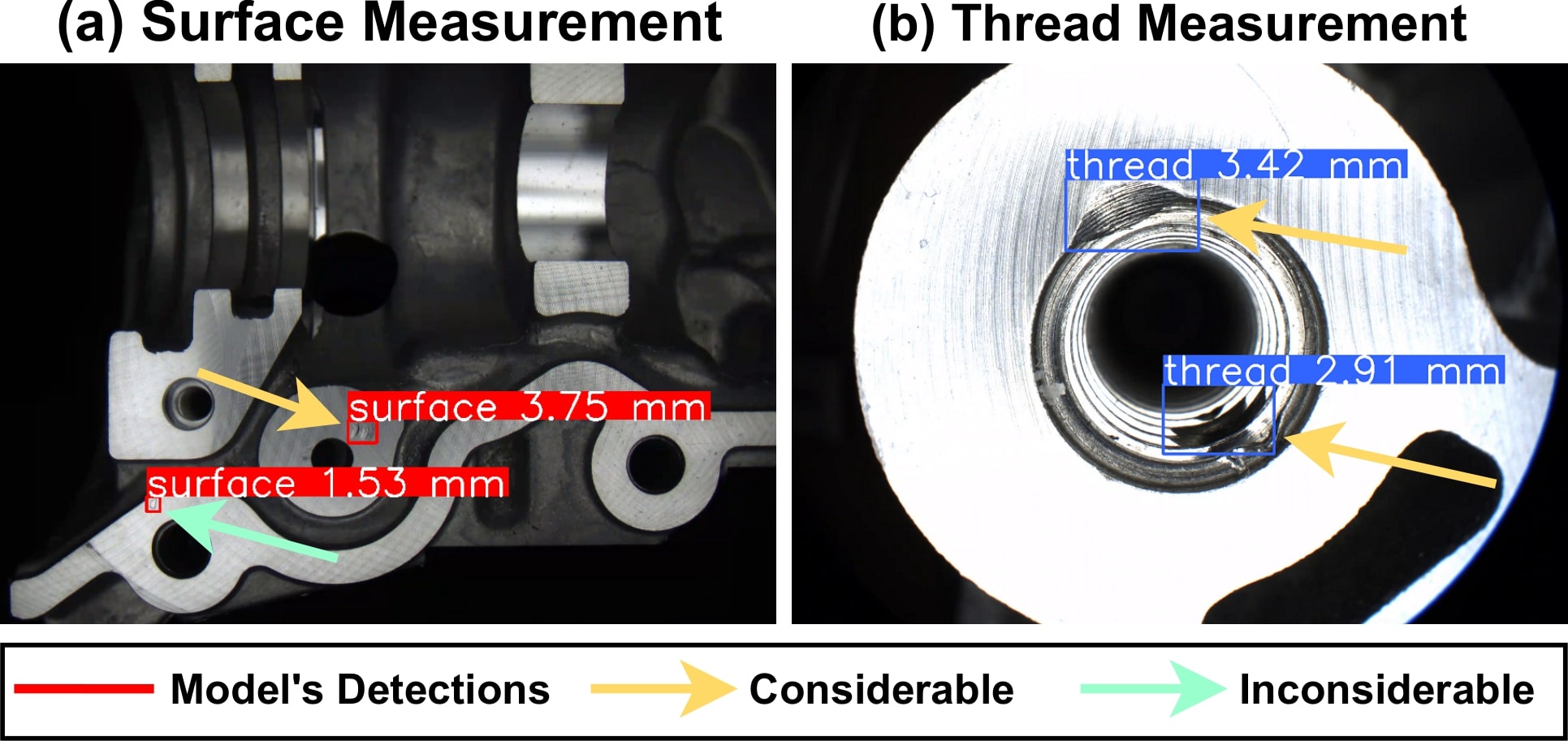
Our approach develops a comprehensive visual inspection framework and integrates it into a robotic solution. A scanning workflow is employed for image acquisition under optimized lighting configurations, designed to eliminate reflections on aluminum surfaces and ensure clear illumination for thread inspection. The overall solution for inspecting surfaces (Fig. 1a) and threads (Fig. 1b) of HPDC automotive parts comprises three main hardware components: (1) A highresolution camera-based vision system, (2) A specialized lighting setup, (3) Two collaborative robots. For defect detection and localization, the YOLO11n [18] model is employed, offering high accuracy and robustness. Several enhancements have been integrated into the detection pipeline, including image slicing, ensemble learning, and bounding box merging, all aimed at improving detection performance and reliability. Additionally, a defect measurement module is incorporated to assess the severity of each detected defect, providing a comprehensive inspection framework.
The main contributions of this work include: 1) a robust system that inspects both surfaces and threads of aluminum HPDC automotive components, 2) the integration of advanced techniques in the detection pipeline to improve accuracy and reduce false positives, and 3) the development of a deep learning based defect measurement module that estimates the size of the detected defects.
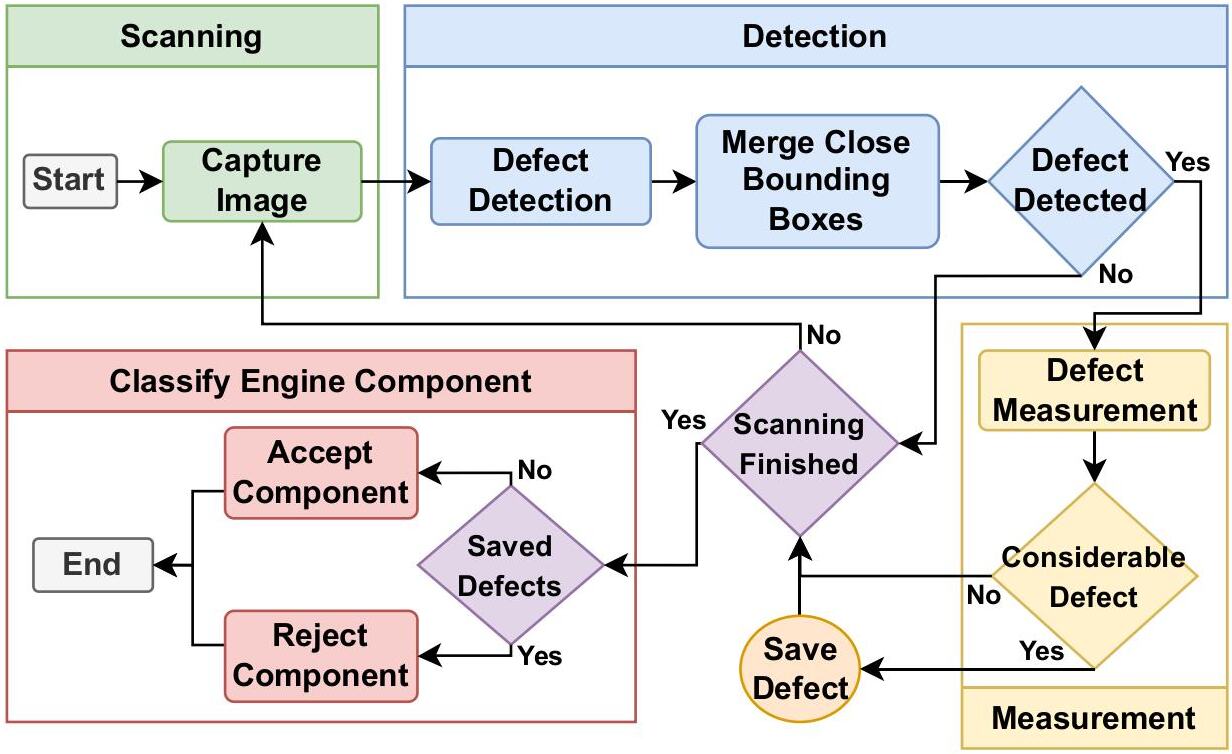
This paper is organized as follows: Sect. II describes the system setup, covering hardware components and software frameworks, while Sect. III outlines the automated inspection process, including the scanning, defect detection, and measurement methods. Sect. IV presents the experimental results, and Sect. V concludes with a discussion of future research directions.
This se
…(Full text truncated)…
This content is AI-processed based on ArXiv data.