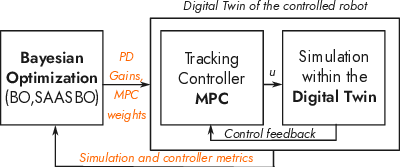
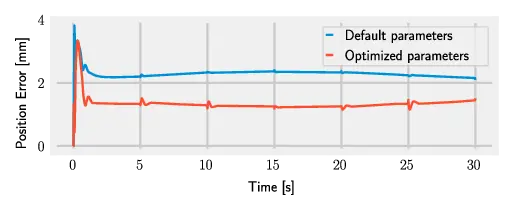
This paper presents an auto-tuning framework for torque-based Nonlinear Model Predictive Control (nMPC), where the MPC serves as a real-time controller for optimal joint torque commands. The MPC parameters, including cost function weights and low-level controller gains, are optimized using high-dimensional Bayesian Optimization (BO) techniques, specifically Sparse Axis-Aligned Subspace (SAASBO) with a digital twin (DT) to achieve precise end-effector trajectory real-time tracking on an UR10e robot arm. The simulation model allows efficient exploration of the high-dimensional parameter space, and it ensures safe transfer to hardware. Our simulation results demonstrate significant improvements in tracking performance (+41.9%) and reduction in solve times (-2.5%) compared to manually-tuned parameters. Moreover, experimental validation on the real robot follows the trend (with a +25.8% improvement), emphasizing the importance of digital twin-enabled automated parameter optimization for robotic operations.
Deep Dive into Bayesian Optimization for Automatic Tuning of Torque-Level Nonlinear Model Predictive Control.
This paper presents an auto-tuning framework for torque-based Nonlinear Model Predictive Control (nMPC), where the MPC serves as a real-time controller for optimal joint torque commands. The MPC parameters, including cost function weights and low-level controller gains, are optimized using high-dimensional Bayesian Optimization (BO) techniques, specifically Sparse Axis-Aligned Subspace (SAASBO) with a digital twin (DT) to achieve precise end-effector trajectory real-time tracking on an UR10e robot arm. The simulation model allows efficient exploration of the high-dimensional parameter space, and it ensures safe transfer to hardware. Our simulation results demonstrate significant improvements in tracking performance (+41.9%) and reduction in solve times (-2.5%) compared to manually-tuned parameters. Moreover, experimental validation on the real robot follows the trend (with a +25.8% improvement), emphasizing the importance of digital twin-enabled automated parameter optimization for rob
Bayesian Optimization for Automatic Tuning of
Torque-Level Nonlinear Model Predictive Control
Gabriele Fadini∗⋆, Deepak Ingole∗, Tong Duy Son†, Alisa Rupenyan∗
∗ZHAW Centre for Artificial Intelligence, Z¨urich University of Applied Sciences, Winterthur, Switzerland
† Siemens Digital Industries Software, Leuven, Belgium
Abstract— This paper presents an auto-tuning framework
for torque-based Nonlinear Model Predictive Control (nMPC),
where the MPC serves as a real-time controller for optimal
joint torque commands. The MPC parameters, including cost
function weights and low-level controller gains, are optimized
using high-dimensional Bayesian Optimization (BO) techniques,
specifically Sparse Axis-Aligned Subspace (SAASBO) with a
digital twin (DT) to achieve precise end-effector trajectory
real-time tracking on an UR10e robot arm. The simulation
model allows efficient exploration of the high-dimensional
parameter space, and it ensures safe transfer to hardware.
Our simulation results demonstrate significant improvements
in tracking performance (+41.9%) and reduction in solve times
(-2.5%) compared to manually-tuned parameters. Moreover,
experimental validation on the real robot follows the trend
(with a +25.8% improvement), emphasizing the importance
of digital twin-enabled automated parameter optimization for
robotic operations.
Index Terms— Torque Control, Nonlinear Model Predictive
Control, Trajectory Tracking, Real-Time Control, Bayesian
Optimization, Robot Control, Digital Twin.
I. INTRODUCTION
Torque-based
Model
Predictive
Control
(MPC)
has
emerged as a powerful framework for robot control, enabling
the direct selection of joint torques while planning opti-
mal control sequences over a receding horizon [1]. Unlike
kinematic controllers that rely on cascaded control loops,
torque MPC computes optimal torque commands respecting
actuator limits and dynamic constraints [2–4].
The practical success of torque MPC depends critically
on tuning its many parameters, such as the weights in
the optimization problem, solver tolerances, and the low-
level controller feedback gains. Each combination creates
different trade-offs between tracking accuracy, computational
efficiency, and robustness. While MPC provides a solid foun-
dation for optimal control, realizing its full potential requires
systematic refinement of these parameters [5]. Manual tuning
of this high-dimensional space is tedious, often suboptimal,
and highly task-dependent. Unlike kinematic control, torque-
level MPC enables higher compliance, making it suitable for
contact-rich tasks and impedance control [6], but this formu-
lation can potentially increase complexity and the chance of
⋆Corresponding Author
This work was supported as a part of NCCR Automation, a National
Centre of Competence in Research, funded by the Swiss National Science
Foundation (grant number 51NF40 225155).
{fadi,inge,rupn}@zhaw.ch, son.tong@siemens.com
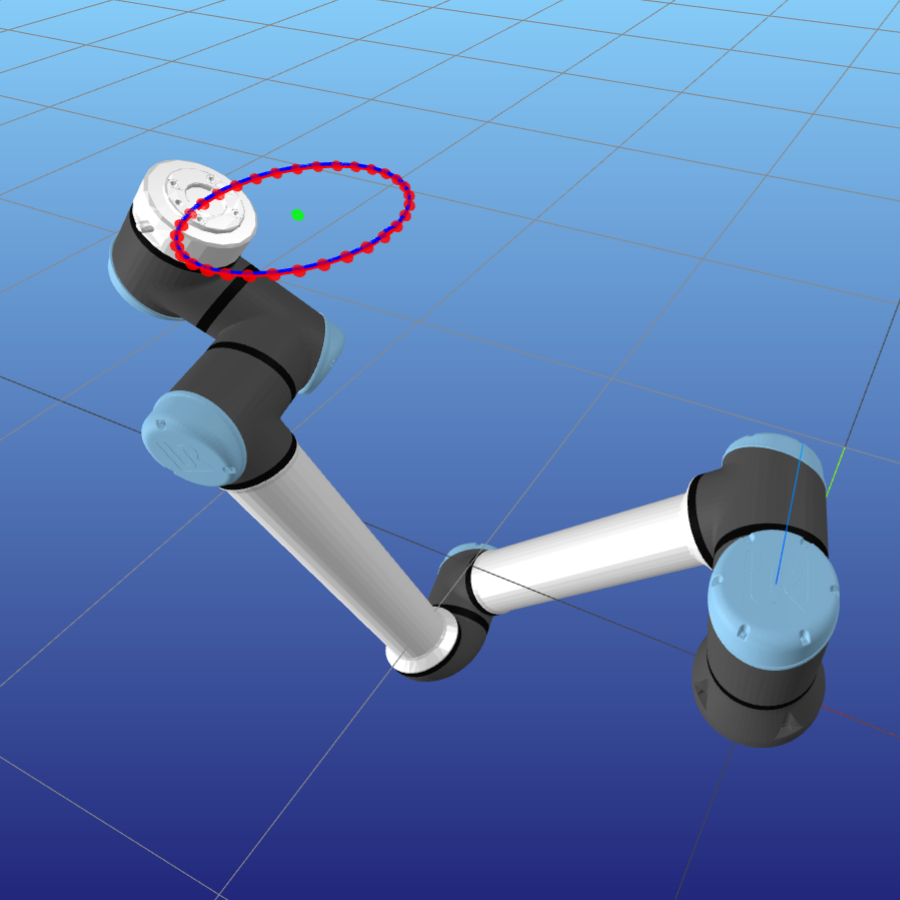
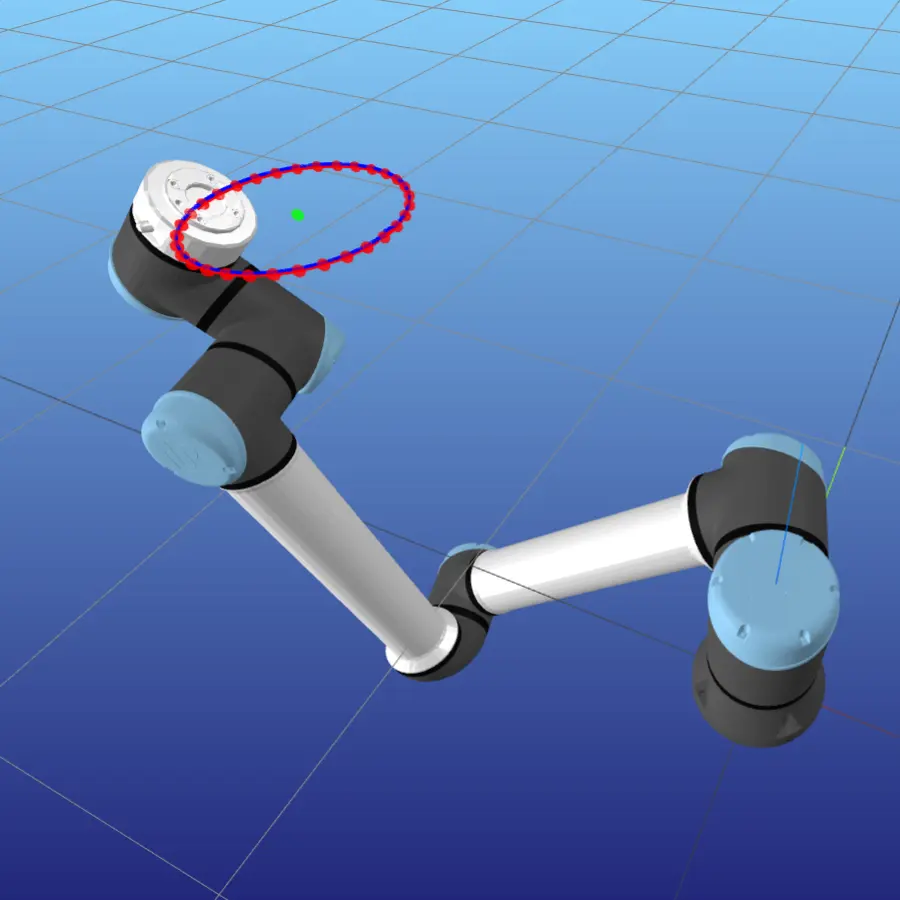
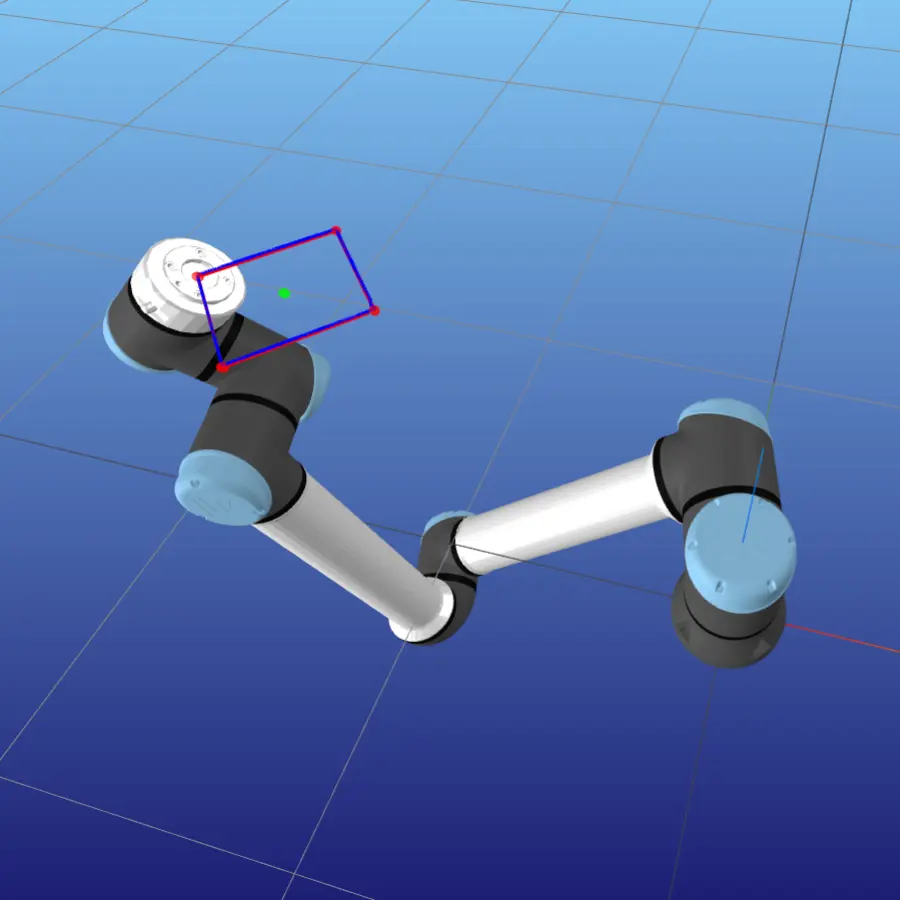
Fig. 1: UR10e robot executing torque-based MPC leveraging
a digital twin for real-time optimization.
system modeling error. Hence, torque-level MPC requires
accurate dynamics modeling to ensure successful sim-to-
real transfer [7]. We address this challenge by leveraging
a system’s digital twin for safe MPC parameter exploration
(Fig. 1), combined with automated tuning methods [8–10].
Recent advances in Bayesian Optimization (BO) provide
promising avenues for automated parameter tuning [5, 11–
13]. In particular, Sparse Axis-Aligned Subspace Bayesian
Optimization (SAASBO) [14, 15] has shown remarkable
performance in high-dimensional problems (hundreds of
parameters) by exploiting low-dimensional structure, making
it well-suited for robotic applications.
This paper’s contributions are the following:
• Implementation of a torque-level nMPC interfaced with
an extensible digital twin of the UR10e robot arm.
• Automated parameter optimization framework using
high-dimensional Bayesian Optimization to balance
real-time execution and control performance.
• Comprehensive
testing
demonstrating
improvement
over baselines in simulation and the real system.
II. PROBLEM FORMULATION
A. Robot Dynamics
Building upon prior force control methodologies [16, 17],
we augment the classical MPC formulation with an explicit
model of the robot’s actuation dynamics. We consider a
robot manipulator operating under torque control, where the
control input u ∈Rnu consists of joint torque commands
and nu is the number of joints. The state of the robot
is represented by x = [q; v] ∈Rnq+nv, where the joint
arXiv:2512.03772v1 [cs.RO] 3 Dec 2025
positions q ∈Rnq and velocities v ∈Rnv. The robot
dynamics follow the standard manipulator equation:
M(q) ˙v + C(q, v)v + g(q) = u,
(1)
where M(q) ∈Rnv×nv is the joint inertia matrix, C(q, v)
represents Coriolis and centrifugal terms, g(q) is the gravity
vector, and u are the applied joint torques.
B. Model Predictive Control Solver Description
We formulate the torque-based MPC optimal control prob-
lem at each time step t
…(Full text truncated)…
This content is AI-processed based on ArXiv data.