Real-time sea state estimation is vital for applications like shipbuilding and maritime safety. Traditional methods rely on accurate wave-vessel transfer functions to estimate wave spectra from onboard sensors. In contrast, our approach jointly estimates sea state and vessel parameters without needing prior transfer function knowledge, which may be unavailable or variable. We model the wave-vessel system using pseudo mass-spring-dampers and develop a dynamic model for the system. This method allows for recursive modeling of wave excitation as a time-varying input, relaxing prior works' assumption of a constant input. We derive statistically consistent process noise covariance and implement a square root cubature Kalman filter for sensor data fusion. Further, we derive the Posterior Cramer-Rao lower bound to evaluate estimator performance. Extensive Monte Carlo simulations and data from a high-fidelity validated simulator confirm that the estimated wave spectrum matches methods assuming complete transfer function knowledge.
Deep Dive into Joint Estimation of Sea State and Vessel Parameters Using a Mass-Spring-Damper Equivalence Model.
Real-time sea state estimation is vital for applications like shipbuilding and maritime safety. Traditional methods rely on accurate wave-vessel transfer functions to estimate wave spectra from onboard sensors. In contrast, our approach jointly estimates sea state and vessel parameters without needing prior transfer function knowledge, which may be unavailable or variable. We model the wave-vessel system using pseudo mass-spring-dampers and develop a dynamic model for the system. This method allows for recursive modeling of wave excitation as a time-varying input, relaxing prior works’ assumption of a constant input. We derive statistically consistent process noise covariance and implement a square root cubature Kalman filter for sensor data fusion. Further, we derive the Posterior Cramer-Rao lower bound to evaluate estimator performance. Extensive Monte Carlo simulations and data from a high-fidelity validated simulator confirm that the estimated wave spectrum matches methods assuming
Understanding sea waves and their interaction with a vessel is crucial for many maritime applications.
Well-known examples include predicting arrival times, optimising mission paths, reducing hull fatigue, among many others [15,30,37,36,40,16]. Conventionally, wave buoys are used to measure wave properties.
Increasing coverage of the oceans with wave buoys demands building new observation systems and their maintenance. The task is costly and information from dispersed wave buoys are not always accurate since they do not provide complete information about a particular vessel location. This necessitates exploring alternative options to better understand the sea state at a vessel’s location. An attractive method is Email addresses: ranjeet.tiwari@adelaide.edu.au (Ranjeet K. Tiwari), daniel.sgarioto@defence.gov.au (Daniel Sgarioto), peter.graham@defence.gov.au (Peter Graham), alexei.skvortsov@defence.gov.au (Alexei Skvortsov), sanjeev.arulampalam@defence.gov.au (Sanjeev Arulampalam), damith.ranasinghe@adelaide.edu.au (Damith C. Ranasinghe) arXiv:2511.21997v1 [eess.SP] 27 Nov 2025 to employ sensors onboard a vessel to estimate wave properties, effectively treating the vessel as a wave buoy [34].
Previous sea state estimation methods from ship sensor data introduced both parametric and nonparametric formulations for spectral estimation in the frequency domain [27,29,33,34,35,39,41]. The main limitation of these approaches is that their outputs are not available at short intervals, and depending on the required frequency resolution and the cross-spectral estimation method, obtaining a sea state estimate may take several minutes [42]. This is less desirable in real-time operational settings. Although recent advances have improved computational efficiency [ [8,38], methods for obtaining the estimate at shorter intervals without full knowledge of the wave-vessel transfer functions remain an area of active interest. Consequently, researchers investigated methods for online estimation using onboard sensor measurements [42,40,20,21,4].
Pioneering work in [42] introduced a Kalman filter formulation for online estimation of wave properties, validated with synthesised datasets. Follow-on research extended the method to account for the motion of a moving ship [40]. Later efforts aimed to refine these methods. For example, [20] introduced a Wiener component to the transfer function in the Kalman filtering approach, aiming to mitigate overestimation at higher frequencies. The study in [21] further extended the inverse estimation approach to multi-directional sea waves, where both directions and frequencies are discretized to estimate the sea wave spectrum. These online estimation methods directly consider the elevation of components of a sea wave as part of the system’s state. This formulation leads to a linear problem; however, its solution requires prior knowledge of the relationship between wave elevation and the specific vessels response to impacting sea waves modeled by a transfer function.
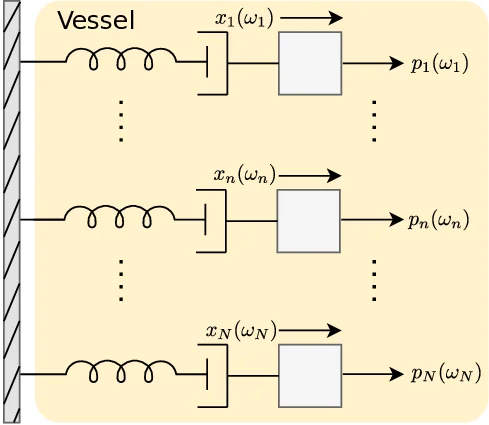
A key challenge with the existing online estimation problem formulations stems from the need to obtain an accurate transfer function for a vessel [30]. Accurate knowledge of the transfer function may not be readily available, especially in operational settings, because of its dependence on specific vessel parameters, such as waterline breadth and draught, as well as the loading conditions that can vary over time [36,8,31,38,46]. Consequently, our prior work in [46] proposed a new approach based on a sea-vessel system analogous to a pseudo mass-spring-damper model [11,26,32] characterising the interaction between wave impact and vessel response. By comparing the dynamics of a mass-spring-damper system with known wave-vessel dynamics, the method derives parameters such as pseudo mass and pseudo damping coefficient in scenarios where vessel parameters are unknown. Notably, the approach offers a joint estimation of states, unknown wave excitations, and vessel parameters, thereby mitigating the need for accurate knowledge of the transfer function. However, the preliminary investigation focused on a feasibility demonstration with a singlefrequency wave impact, and the method could not account for the sea wave spectra encountered in practical settings, in both data acquisition and wave estimation.
In this work, we develop a method for online sea wave estimation for sea wave spectra that is resilient to incomplete knowledge of the transfer function parameters and to dynamic changes in the vessels physical characteristics, such as mass and breadth. We propose a system of massspringdamper models, along with a wavebuoy equivalence, to formulate an inputstateparameter estimation problem using noisy measurements from onboard sensors, where sensor measurements and their derived quantities are treated as system states.
In this approach, the wave elevation is not directly considered as a state; instead, the wave excitation impacting the vessel
…(Full text truncated)…
This content is AI-processed based on ArXiv data.