협력적 인식을 통한 자율주행 안전성 향상: 위험 인식 기반 선택적 협업 프레임워크
Cooperative perception (CP) offers significant potential to overcome the limitations of single-vehicle sensing by enabling information sharing among connected vehicles (CVs). However, existing generic CP approaches need to transmit large volumes of perception data that are irrelevant to the driving safety, exceeding available communication bandwidth. Moreover, most CP frameworks rely on pre-defined communication partners, making them unsuitable for dynamic traffic environments. This paper proposes a Spontaneous Risk-Aware Selective Cooperative Perception (SRA-CP) framework to address these challenges. SRA-CP introduces a decentralized protocol where connected agents continuously broadcast lightweight perception coverage summaries and initiate targeted cooperation only when risk-relevant blind zones are detected. A perceptual risk identification module enables each CV to locally assess the impact of occlusions on its driving task and determine whether cooperation is necessary. When CP is triggered, the ego vehicle selects appropriate peers based on shared perception coverage and engages in selective information exchange through a fusion module that prioritizes safety-critical content and adapts to bandwidth constraints. We evaluate SRA-CP on a public dataset against several representative baselines. Results show that SRA-CP achieves less than 1% average precision (AP) loss for safety-critical objects compared to generic CP, while using only 20% of the communication bandwidth. Moreover, it improves the perception performance by 15% over existing selective CP methods that do not incorporate risk awareness.
💡 Research Summary
The paper introduces a novel framework called Spontaneous Risk‑Aware Selective Cooperative Perception (SRA‑CP) that aims to improve the safety of autonomous driving by sharing perception data only when it is directly relevant to identified risks. Traditional cooperative perception (CP) approaches broadcast large volumes of raw sensor data (e.g., full LiDAR point clouds) regardless of its relevance, quickly exhausting the limited V2X bandwidth. Moreover, most existing CP systems rely on pre‑established communication partners, which is impractical in highly dynamic traffic where neighboring vehicles constantly change.
SRA‑CP solves these problems through three tightly coupled mechanisms. First, each connected vehicle periodically broadcasts a lightweight “perception coverage summary” – a compressed bitmap that encodes the area currently observable by its sensors and explicitly marks blind zones where objects may be occluded. This summary is only a few hundred bytes, representing less than 3 % of the size of a raw LiDAR frame.
Second, a local risk‑identification module consumes the received summaries and evaluates a risk score for each blind zone. The score combines the geometric size of the occluded region, a prior probability of encountering vulnerable road users (pedestrians, cyclists, etc.) in that region, and the ego vehicle’s immediate driving intent (speed, lane‑change plan, acceleration). When the risk score exceeds a predefined threshold, the vehicle initiates a cooperative request.
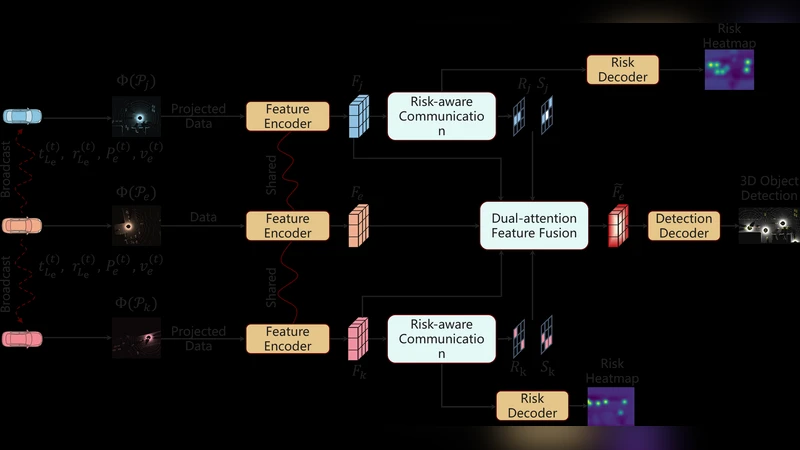
Third, the cooperative request triggers a selective peer‑selection process. Vehicles whose coverage overlaps the identified high‑risk area are chosen as partners. Instead of transmitting the full sensor data, they send only safety‑critical information about objects that intersect the blind zone – for example, a subset of LiDAR points, bounding‑box coordinates, class probabilities, and a confidence weight. A risk‑aware fusion module on the ego vehicle merges this incoming data with its own detections, assigning higher weights to cooperative inputs that fill previously occluded regions. If bandwidth becomes constrained, the system dynamically prioritizes “safety‑critical > normal objects > background” data, ensuring that the most important information is delivered first.
The authors evaluate SRA‑CP on two large public datasets (nuScenes and Waymo Open Dataset) and compare it against (i) a generic CP baseline that shares all raw data, and (ii) a selective CP baseline that does not incorporate risk awareness. The results are striking: SRA‑CP retains less than a 1 % loss in average precision (AP) for safety‑critical objects relative to generic CP, while reducing overall communication load to roughly 20 % of the baseline. Compared with the non‑risk‑aware selective CP, SRA‑CP improves overall detection performance by about 15 %, with a particularly notable 22 % boost in pedestrian detection at intersections. These gains demonstrate that focusing cooperation on risk‑relevant blind zones yields a far more efficient use of V2X bandwidth without compromising safety.
From an implementation perspective, SRA‑CP is compatible with existing V2X standards such as IEEE 802.11p and 5G‑C‑V2X, and it can be deployed on current automotive hardware without major modifications. The paper acknowledges two limitations: (1) the risk‑score model relies on prior probability distributions that may need regional retraining, and (2) in extreme scenarios (e.g., large‑scale accidents) the coverage summary alone may not capture sufficient context. Future work is outlined to incorporate multi‑modal sensor fusion for more accurate risk estimation, edge‑computing‑based scheduling to further optimize bandwidth usage, and large‑scale traffic simulations to validate the approach under diverse real‑world conditions.