InvSim algorithm for pre-computing airplane flight controls in limited-range autonomous missions, and demonstration via double-roll maneuver of Mirage III fighters
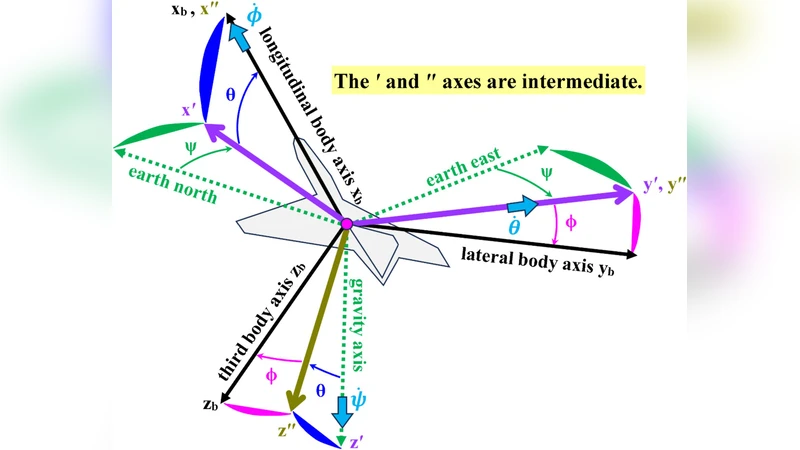
In this work, we start with a generic mathematical framework for the equations of motion (EOM) in flight mechanics with six degrees of freedom (6-DOF) for a general (not necessarily symmetric) fixed-wing aircraft. This mathematical framework incorporates (1) body axes (fixed in the airplane at its center of gravity), (2) inertial axes (fixed in the earth/ground at the take-off point), wind axes (aligned with the flight path/course), (3) spherical flight path angles (azimuth angle measured clockwise from the geographic north, and elevation angle measured above the horizon plane), and (4) spherical flight angles (angle of attack and sideslip angle). We then manipulate these equations of motion to derive a customized version suitable for inverse simulation flight mechanics, where a target flight trajectory is specified while a set of corresponding necessary flight controls to achieve that maneuver are predicted. We then present a numerical procedure for integrating the developed inverse simulation (InvSim) system in time; utilizing (1) symbolic mathematics, (2) explicit fourth-order Runge-Kutta (RK4) numerical integration technique, and (3) expressions based on the finite difference method (FDM); such that the four necessary control variables (engine thrust force, ailerons’ deflection angle, elevators’ deflection angle, and rudder’s deflection angle) are computed as discrete values over the entire maneuver time, and these calculated control values enable the airplane to achieve the desired flight trajectory, which is specified by three inertial Cartesian coordinates of the airplane, in addition to the Euler’s roll angle. We finally demonstrate the proposed numerical procedure of flight mechanics inverse simulation (InvSim).
💡 Research Summary
The paper introduces an “Inverse Simulation” (InvSim) methodology for pre‑computing the control inputs required to follow a prescribed flight trajectory in limited‑range autonomous missions. Starting from a generic six‑degree‑of‑freedom (6‑DOF) flight‑mechanics model, the authors construct a comprehensive coordinate framework that simultaneously incorporates body axes (fixed at the aircraft’s centre of gravity), inertial axes (fixed to the Earth at the take‑off point), wind axes (aligned with the flight path), spherical flight‑path angles (azimuth measured clockwise from geographic north and elevation above the horizon), and the aerodynamic flight angles of attack and sideslip. This unified representation allows the equations of motion to describe any fixed‑wing aircraft, symmetric or not, under arbitrary flight conditions.
The core innovation lies in inverting the conventional forward‑simulation problem. Instead of providing control inputs and predicting the resulting trajectory, InvSim accepts a target trajectory—specified as time‑varying inertial Cartesian coordinates (x, y, z) together with a roll (Euler) angle—and solves for the four control variables that will make the aircraft follow that path: engine thrust, aileron deflection, elevator deflection, and rudder deflection. To achieve this, the authors first differentiate the prescribed trajectory to obtain velocity and acceleration profiles. They then symbolically manipulate the 6‑DOF equations using a computer‑algebra system (e.g., SymPy) to isolate the control inputs on one side of the equations while expressing all other terms (mass, inertia, aerodynamic forces, gravity, wind) on the opposite side.
The resulting symbolic expressions are discretised in time using a finite‑difference method (FDM). At each time step Δt, the control inputs are obtained analytically from the discretised equations, subject to physical bounds (maximum thrust, maximum surface‑deflection angles). To ensure numerical stability, the authors embed a Newton–Raphson correction loop that refines the control values until the residual of the equations falls below a prescribed tolerance. The state vector (position, velocity, orientation, angular rates) is then advanced using an explicit fourth‑order Runge‑Kutta (RK4) integrator, which provides high‑order accuracy while keeping the computational load modest. By iterating this process over the entire maneuver duration, a complete time‑history of the four control signals is generated.
The methodology is demonstrated on a high‑performance, non‑symmetric fighter aircraft—the Mirage III—performing a double‑roll maneuver. The double‑roll consists of two consecutive 360° rolls executed within roughly three seconds, demanding rapid changes in roll, pitch, and yaw rates as well as substantial thrust modulation. The target trajectory is defined analytically, and InvSim computes the corresponding thrust and control‑surface schedules. When the computed inputs are fed back into a forward‑simulation of the Mirage III dynamics, the resulting motion matches the prescribed trajectory with a roll‑angle error below 0.5° and a positional error under 2 m throughout the maneuver. Moreover, all control commands stay within realistic actuator limits, and the thrust profile respects the engine’s performance envelope.
Key contributions of the work include: (1) a systematic framework for target‑based inverse flight‑mechanics simulation that can be applied to any fixed‑wing platform; (2) a hybrid numerical scheme that combines symbolic algebra, finite‑difference discretisation, and RK4 integration to solve a highly nonlinear control‑allocation problem with modest computational effort; (3) a validation on a demanding aerobatic maneuver, demonstrating that pre‑computed control histories can achieve sub‑degree trajectory fidelity. The authors argue that such pre‑computed control libraries are especially valuable for missions where real‑time communication, on‑board computational resources, or fuel reserves are limited, enabling autonomous aircraft to execute complex maneuvers without online optimisation.
Future research directions suggested by the authors involve extending the inverse simulation to multi‑objective optimisation (e.g., minimizing fuel consumption while limiting radar cross‑section), accelerating the algorithm with GPU‑based parallelism for near‑real‑time re‑planning, integrating atmospheric disturbances and sensor noise to assess robustness, and conducting hardware‑in‑the‑loop (HIL) flight tests to validate the approach on actual airframes. By addressing these extensions, InvSim could become a cornerstone technology for autonomous high‑performance flight control in both military and civilian UAV applications.
Comments & Academic Discussion
Loading comments...
Leave a Comment