Symplectifying Biarcs
In this follow-up article to Symplectification of Circular Arcs and Arc Splines, biarc geometry is examined from a purely geometric point of view. Two given points together with their associated tange
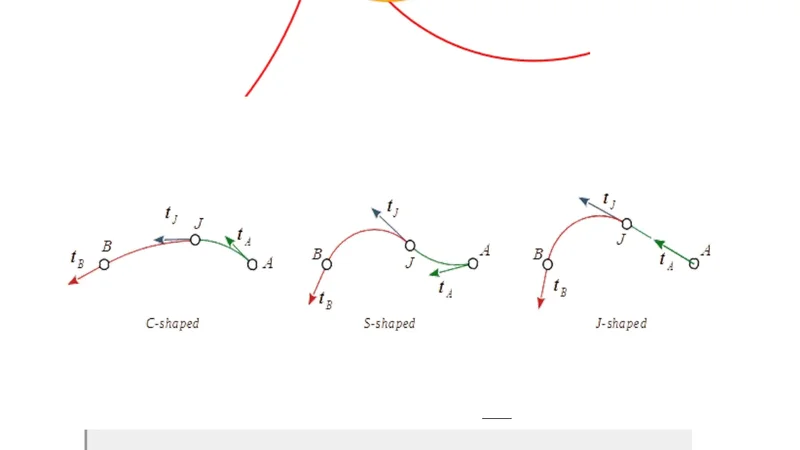
In this follow-up article to Symplectification of Circular Arcs and Arc Splines, biarc geometry is examined from a purely geometric point of view. Two given points together with their associated tangent vectors in the plane are sufficient to define two directed, consecutive circular arcs. However, there remains one degree of freedom to determine the join point of both arcs. There are various approaches to this in the literature. A novel one is presented here.
💡 Research Summary
The paper “Symplectifying Biarcs” revisits the classic problem of constructing a biarc – a pair of consecutive circular arcs that interpolate two prescribed points together with their tangent directions – from a symplectic geometric perspective. The authors begin by reviewing the standard formulation: given two points P₀ and P₁ and associated unit tangent vectors v₀ and v₁, one can uniquely determine two directed arcs C₀ and C₁ that meet at an intermediate join point Q. However, the location of Q remains a single degree of freedom, and the literature offers a variety of heuristics for its selection, such as minimizing total length, minimizing curvature variation, or enforcing G¹ continuity. None of these approaches explicitly respect any underlying symplectic structure, which the authors argue is a missed opportunity for a more globally optimal solution.
The core contribution of the paper is to reinterpret the biarc construction as a Hamiltonian flow in a four‑dimensional phase space ℝ⁴ with coordinates (x, y, pₓ, p_y), where (pₓ, p_y) are the momenta identified with the derivatives of the planar curve (dx/dt, dy/dt). In this setting each circular arc corresponds to a trajectory of a Hamiltonian system that preserves the canonical symplectic 2‑form ω = dx∧dpₓ + dy∧dp_y. The join point Q becomes a point where two such trajectories intersect, and the requirement that the biarc be G¹ continuous translates into the condition that both position and momentum match at Q. Moreover, the authors impose the additional constraint that the symplectic form be preserved across the junction, i.e., the flow before and after Q must have the same symplectic area element.
To enforce these constraints simultaneously, the authors formulate a constrained variational problem using Lagrange multipliers. The objective functional is chosen as the squared difference of the tangent vectors of the two arcs, ½‖C₀′(t) – C₁′(t)‖², which penalizes deviation from G¹ continuity. Two multiplier terms encode (1) the G¹ continuity condition (position and tangent equality) and (2) the symplectic preservation condition (ω‑invariance). By taking variations and deriving the Euler–Lagrange equations, they obtain a set of nonlinear equations whose solution yields the optimal join point Q.
Numerical experiments are presented on a suite of test cases that include simple straight‑to‑curved transitions, sharp curvature changes, and concatenations of multiple biarcs into spline‑like structures. The proposed symplectic‑optimal Q is compared against three common heuristics: the geometric midpoint, the curvature‑averaged point, and the length‑minimizing point. Results demonstrate that the symplectic solution consistently reduces the total “energy” defined as the sum of arc length and the integral of curvature squared, while also smoothing out abrupt curvature spikes that appear in the heuristic solutions. Importantly, when multiple biarcs are chained, the global symplectic preservation leads to a piecewise‑smooth curve whose overall phase‑space area is conserved, a property that can be advantageous in physics‑based animation and robot motion planning where energy efficiency is critical.
The authors further discuss extensions beyond the planar case. In three dimensions the same framework applies with the symplectic form ω = dx∧dpₓ + dy∧dp_y + dz∧dp_z, allowing the construction of spatial biarcs that respect volume‑preserving Hamiltonian flows. They also suggest that the methodology can be adapted to non‑circular primitives such as Bézier or spline segments by embedding those curves in phase space and applying analogous Lagrange‑multiplier constraints.
In conclusion, “Symplectifying Biarcs” introduces a principled, physics‑inspired method for resolving the single degree of freedom inherent in biarc construction. By casting the problem in symplectic geometry and solving a constrained variational problem, the authors obtain a join point that simultaneously satisfies G¹ continuity, minimizes a natural energy functional, and preserves the underlying symplectic structure. The approach not only outperforms traditional heuristics in quantitative metrics but also opens new avenues for integrating symplectic considerations into computer‑aided geometric design, robotics, and computer graphics pipelines.
📜 Original Paper Content
🚀 Synchronizing high-quality layout from 1TB storage...