Beyond Point Estimates: Likelihood-Based Full-Posterior Wireless Localization
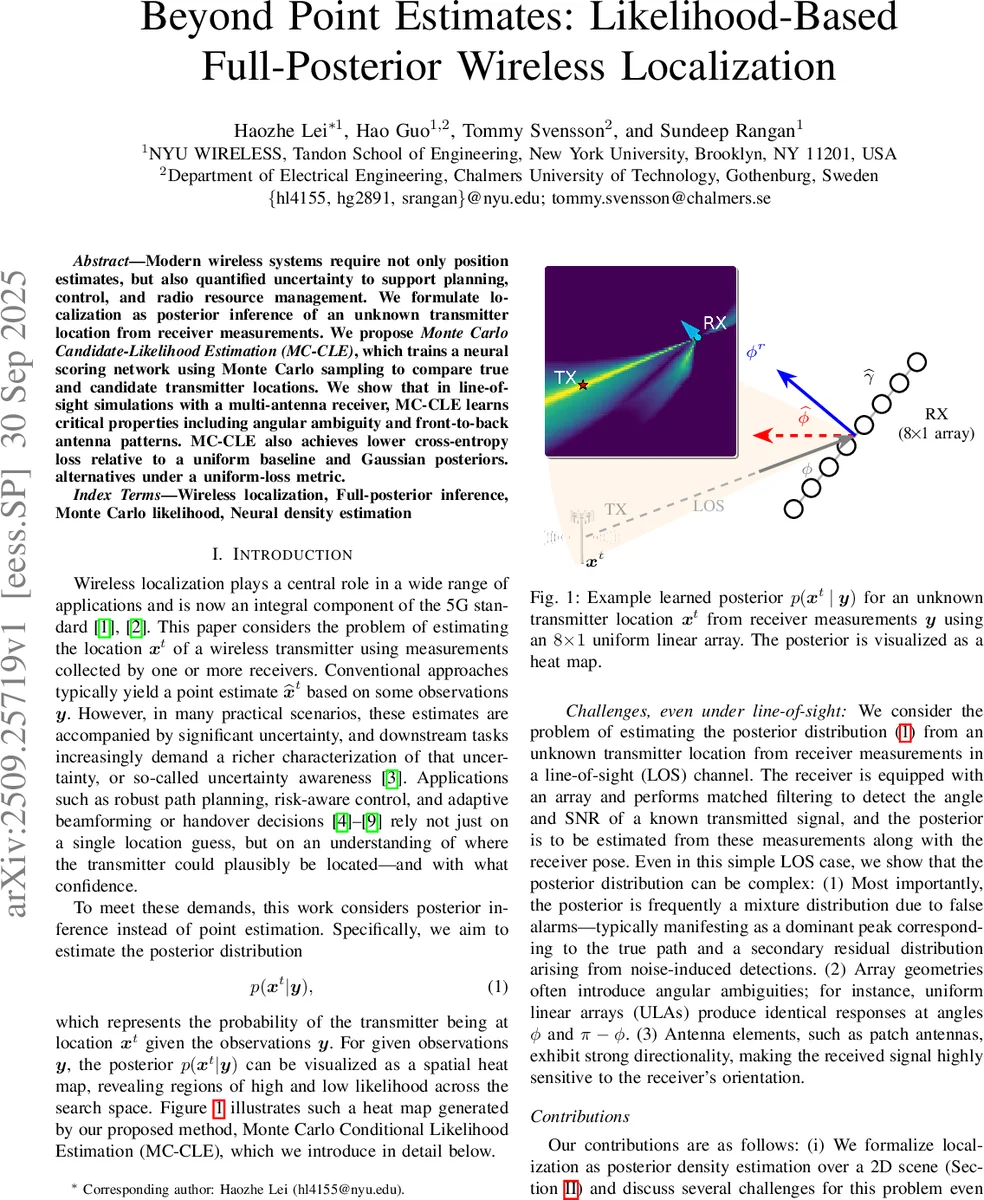
Modern wireless systems require not only position estimates, but also quantified uncertainty to support planning, control, and radio resource management. We formulate localization as posterior inference of an unknown transmitter location from receiver measurements. We propose Monte Carlo Candidate-Likelihood Estimation (MC-CLE), which trains a neural scoring network using Monte Carlo sampling to compare true and candidate transmitter locations. We show that in line-of-sight simulations with a multi-antenna receiver, MC-CLE learns critical properties including angular ambiguity and front-to-back antenna patterns. MC-CLE also achieves lower cross-entropy loss relative to a uniform baseline and Gaussian posteriors. alternatives under a uniform-loss metric.
💡 Research Summary
This paper addresses the growing need for not only point estimates but also full uncertainty quantification in wireless localization. The authors formulate the problem as posterior inference of an unknown transmitter location xₜ given receiver measurements y, and they propose a novel learning framework called Monte Carlo Candidate‑Likelihood Estimation (MC‑CLE). MC‑CLE approximates the un‑normalized log‑likelihood g_θ(xₜ, y) with a neural network and estimates the partition function Z_θ(y) by Monte Carlo summation over a set of randomly drawn candidate positions. By minimizing a sampled cross‑entropy loss, the network learns to output a likelihood that correctly concentrates around the true location while accounting for false alarms, angular ambiguities, and antenna directionality.
The input to the network consists of physically motivated features: a unit vector pointing from the receiver to the candidate transmitter, a logarithmic distance term, a scaled SNR, and sine/cosine encodings of the receiver orientation and measured angle of arrival. The architecture uses two hidden layers (64 and 16 units) with ReLU activations, ending in a scalar output representing g_θ.
Experiments are conducted in a 12 GHz, 200 MHz LOS scenario with an 8‑element uniform linear array and a realistic 3GPP antenna pattern (3 dB beamwidth 65°). A dataset of 100 000 TX‑RX pairs is generated uniformly over a 100 × 100 m area; 75 % is used for training and 25 % for validation. MC‑CLE is compared against two Gaussian baselines (Cartesian and polar parameterizations) that also use neural networks to predict mean and covariance.
Performance is evaluated on two candidate sets: a regular grid (961 points) and a random set (1 000 points). The metrics are sampled cross‑entropy loss L, geometric improvement G = e^{−L}, and gap‑closure ratio R = −L · log K · 100 %. MC‑CLE achieves G≈30–32 and R≈49–50 % on both sets, substantially outperforming the Gaussian models (G≈10–11, R≈33–34 %). Visualizations of posterior heat‑maps show that MC‑CLE captures multimodal structures caused by ULA symmetry, front‑to‑back antenna gain, and mixture components from false detections—features that Gaussian posteriors cannot represent.
The contributions are threefold: (i) a Bayesian formulation of wireless localization that seeks the full posterior rather than a point estimate; (ii) a practical Monte Carlo‑based training objective that sidesteps the intractable normalization constant; and (iii) empirical evidence that the learned likelihood faithfully reflects complex physical phenomena. The work opens avenues for extending the approach to multi‑measurement, non‑LOS, and real‑time scenarios, as well as integrating additional sensor modalities.
Comments & Academic Discussion
Loading comments...
Leave a Comment