Robotic Manipulation of a Rotating Chain with Bottom End Fixed
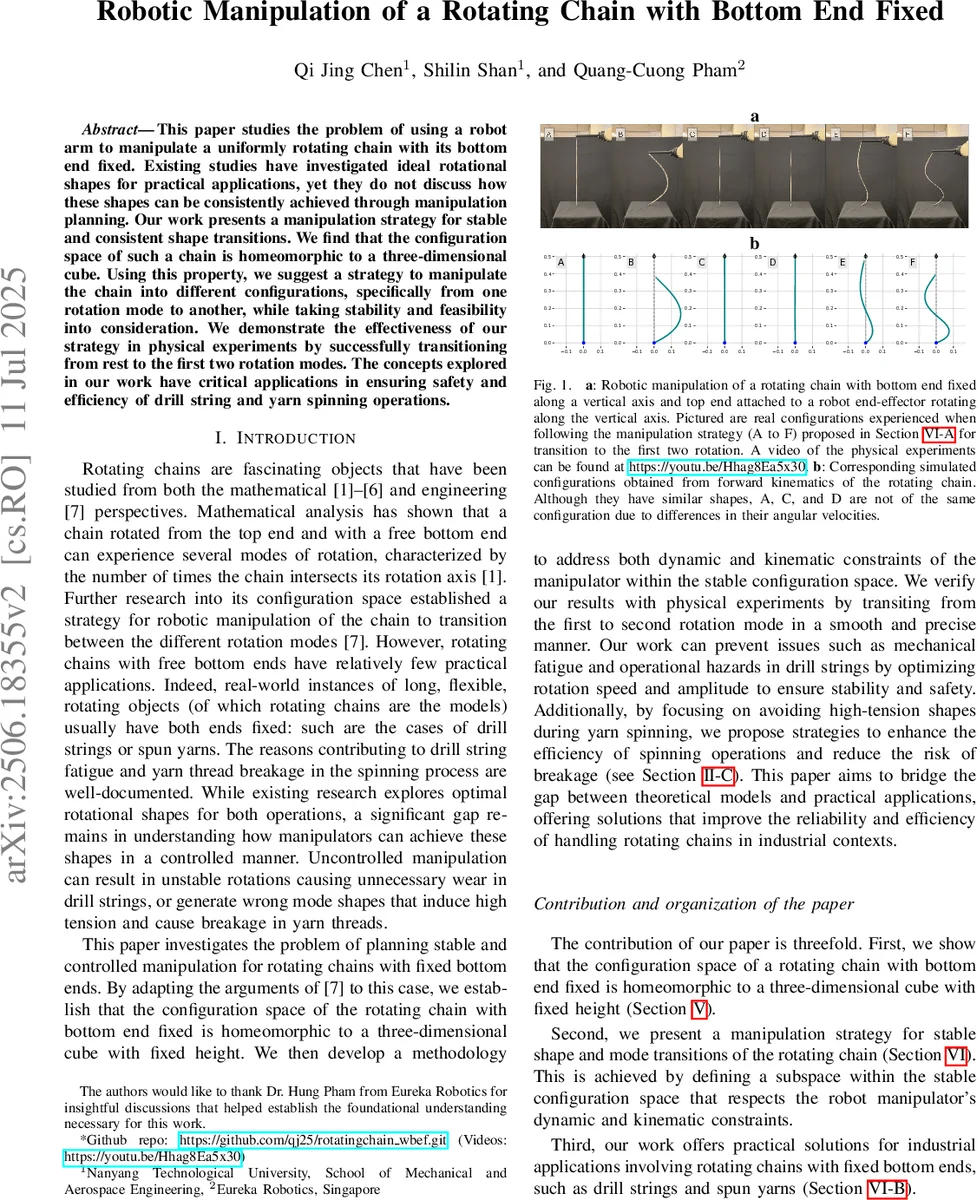
This paper studies the problem of using a robot arm to manipulate a uniformly rotating chain with its bottom end fixed. Existing studies have investigated ideal rotational shapes for practical applications, yet they do not discuss how these shapes can be consistently achieved through manipulation planning. Our work presents a manipulation strategy for stable and consistent shape transitions. We find that the configuration space of such a chain is homeomorphic to a three-dimensional cube. Using this property, we suggest a strategy to manipulate the chain into different configurations, specifically from one rotation mode to another, while taking stability and feasibility into consideration. We demonstrate the effectiveness of our strategy in physical experiments by successfully transitioning from rest to the first two rotation modes. The concepts explored in our work have critical applications in ensuring safety and efficiency of drill string and yarn spinning operations.
💡 Research Summary
The paper addresses the problem of manipulating a uniformly rotating chain whose lower end is fixed, a configuration that appears in industrial settings such as drill strings and yarn spinning. While prior work has studied the ideal shapes of rotating chains and the configuration space of a chain with a free lower end, it has not provided a systematic way to achieve those shapes through robot manipulation.
The authors first derive the equations of motion for the fixed‑bottom chain, incorporating the constraint force needed to keep the lower end stationary. By introducing dimensionless variables they rewrite the governing differential equation into a boundary‑value problem (BVP). A simple shooting method is used to solve the BVP for any given set of control inputs (attachment radius r, angular speed ω, and initial slope ρ′(0)). Multiple solutions can exist for the same inputs, each corresponding to a different rotation mode, defined as the number of times the chain crosses its vertical axis.
A central theoretical contribution is the proof that the configuration space C (the set of all admissible triples (ω, ρ, T) satisfying the dynamics) is homeomorphic to a three‑dimensional cube of fixed height. The authors define a parameter space A = (0, L̅_max) × (0, T̅_max) × (0, 1) where L̅ = L ω²/g, T̅ = T ω²/(µg²) and c = ρ′(0) (scaled). They construct a continuous bijection f : A → C using the shooting method and prove its continuity and invertibility, establishing the topological equivalence. This result allows the configuration space to be parameterized by three scalar variables, dramatically simplifying path planning.
Stability analysis is performed with a 10‑link lumped‑mass model linearized around equilibrium. Eigenvalue analysis identifies a sub‑space of A where the real parts of all eigenvalues are negative; this “stable subspace” imposes practical limits on ω, T, and c. The authors illustrate the stable region in Figure 3, showing that high angular speeds must be paired with sufficient tension to remain stable.
Based on these insights, the manipulation strategy consists of two stages. First, a target rotation mode is selected, and the corresponding (L̅, T̅, c) coordinates are computed, yielding the desired ω and tension T. Second, a feasible trajectory in the robot’s control space V = (r, ω, h) is generated that moves from the current configuration to the target while staying inside the stable subspace and respecting the robot’s kinematic and dynamic limits (e.g., maximum joint speeds, reachable attachment radius). The trajectory is executed by gradually varying r and ω, with real‑time feedback adjusting T to keep the chain within the stable region.
Physical experiments were carried out using a 6‑DOF industrial robot arm holding a 1‑meter uniform chain. Starting from rest, the robot increased ω smoothly to achieve the first rotation mode (single axial crossing) and then further increased ω to transition to the second mode (double crossing). High‑speed video and tension sensors confirmed that the observed shapes matched the simulated configurations and that the chain remained in the predicted stable region throughout the transitions.
The paper concludes by discussing practical implications. In drill‑string operations, the ability to plan stable rotation speeds and tensions can reduce fatigue‑induced failures and avoid harmful axial vibrations. In yarn spinning, selecting appropriate rotation modes prevents excessive tension that leads to thread breakage, thereby improving productivity. Because the configuration space is topologically simple, the proposed framework can be integrated into real‑time robot controllers for on‑site deployment. Overall, the work bridges the gap between theoretical analysis of rotating chains and actionable manipulation planning, offering a robust, experimentally validated method for safe and efficient handling of fixed‑bottom rotating chains.
Comments & Academic Discussion
Loading comments...
Leave a Comment