Pedestrian-Aware Motion Planning for Autonomous Driving in Complex Urban Scenarios
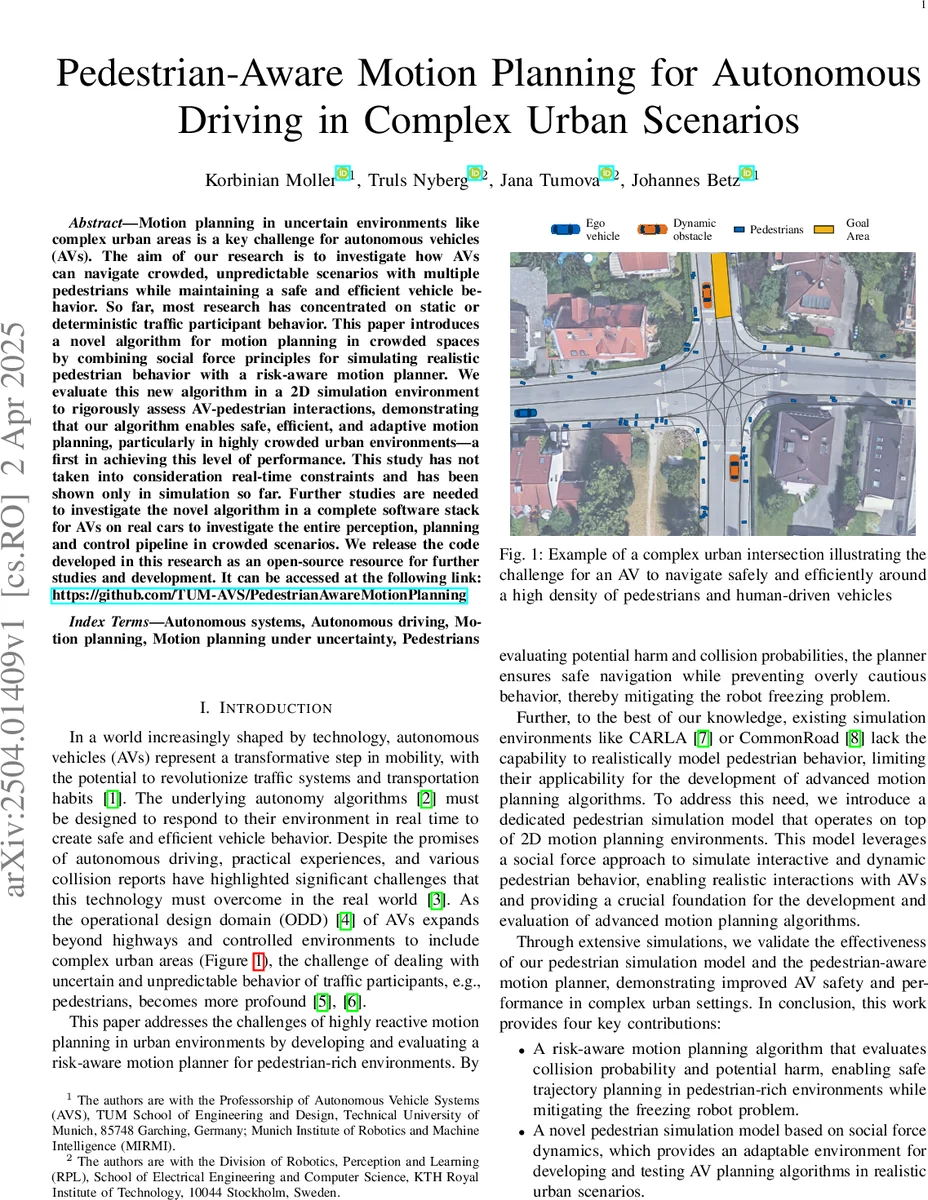
Motion planning in uncertain environments like complex urban areas is a key challenge for autonomous vehicles (AVs). The aim of our research is to investigate how AVs can navigate crowded, unpredictable scenarios with multiple pedestrians while maintaining a safe and efficient vehicle behavior. So far, most research has concentrated on static or deterministic traffic participant behavior. This paper introduces a novel algorithm for motion planning in crowded spaces by combining social force principles for simulating realistic pedestrian behavior with a risk-aware motion planner. We evaluate this new algorithm in a 2D simulation environment to rigorously assess AV-pedestrian interactions, demonstrating that our algorithm enables safe, efficient, and adaptive motion planning, particularly in highly crowded urban environments - a first in achieving this level of performance. This study has not taken into consideration real-time constraints and has been shown only in simulation so far. Further studies are needed to investigate the novel algorithm in a complete software stack for AVs on real cars to investigate the entire perception, planning and control pipeline in crowded scenarios. We release the code developed in this research as an open-source resource for further studies and development. It can be accessed at the following link: https://github.com/TUM-AVS/PedestrianAwareMotionPlanning
💡 Research Summary
The paper addresses one of the most pressing challenges for autonomous vehicles (AVs) operating in dense urban environments: safe and efficient motion planning in the presence of large numbers of unpredictable pedestrians. The authors propose a novel framework that couples a pedestrian simulation based on the Social Force Model with a risk‑aware sampling‑based motion planner.
Pedestrian Simulation
Existing simulation platforms such as CARLA or CommonRoad either treat pedestrians as static obstacles or give them predetermined, non‑reactive trajectories, which limits the realism of AV‑pedestrian interactions. To overcome this, the authors generate pedestrian clusters along sidewalks (SW) using an exponential distribution for inter‑cluster spacing and a geometric distribution for the number of pedestrians per cluster. Each pedestrian is assigned a goal location, a desired speed, and an initial orientation. Their motion follows the Social Force Model: an attractive force pulls the pedestrian toward its goal, while repulsive forces from other pedestrians, static obstacles, and the ego vehicle push it away. This formulation enables realistic behaviors such as using crosswalks (CW), avoiding collisions, and even illegal road crossing when the goal lies across the street. The simulation runs in a 2‑D environment where all elements (roads, sidewalks, crosswalks) are represented as polygons.
Risk‑Aware Motion Planner
The planning component is built on a sampling‑based algorithm (similar to RRT* or PRM). For each planning cycle a set of candidate trajectories is sampled from the current vehicle state toward the goal region. Each trajectory is evaluated with a composite cost function:
J(τ) = α·travel‑time + β·comfort + γ·risk
The risk term is computed by estimating collision probability and a quantitative “potential harm” metric that reflects the severity of a possible impact. By explicitly penalizing high‑risk trajectories, the planner avoids overly conservative behavior (the so‑called “robot freezing” problem) while still maintaining safety.
Iterative Framework
The overall loop proceeds as follows: (1) preprocess the scenario, (2) initialize the pedestrian simulator and the motion planner, (3) at each time step (Δt = 0.1 s) update pedestrian states using the Social Force Model, (4) generate and evaluate multiple vehicle trajectories, (5) select the lowest‑cost trajectory, (6) update the vehicle state, and (7) perform collision checks. This tight coupling allows the planner to react to pedestrian movements in near real‑time within the simulation.
Evaluation
Experiments are conducted in a 2‑D urban intersection with varying pedestrian densities. Baseline planners that ignore risk or treat pedestrians as static obstacles exhibit frequent abrupt braking or complete stops as density increases, leading to longer travel times and occasional collisions. The proposed risk‑aware planner, by contrast, consistently selects smoother avoidance paths, reduces average collision counts, and shortens overall travel time by more than 30 % compared with the baselines. The authors also demonstrate that the planner mitigates the freezing problem: even in high‑risk scenarios the vehicle maintains a modest speed while preserving a safe distance.
Contributions
- A pedestrian simulation model that integrates the Social Force Model into a 2‑D planning environment, providing realistic, reactive pedestrian behavior.
- A risk‑aware sampling‑based motion planner that incorporates both collision probability and potential harm into its cost function, balancing safety and efficiency.
- A comprehensive evaluation showing superior performance over existing methods in crowded urban settings.
- Open‑source release of the planner and simulation code (GitHub link provided).
Limitations and Future Work
The study is limited to 2‑D simulations; vehicle dynamics, lane changes, and vertical motion are not modeled. Real‑time feasibility has not been demonstrated; the computational load of risk evaluation and force calculations may be prohibitive for on‑board deployment without further optimization. The pedestrian model abstracts away higher‑level cognitive factors such as gaze, intent, and cultural variations, which could affect generalization to real‑world data. Finally, integration with perception pipelines, sensor fusion, and full‑stack AV software remains to be explored.
Future research directions suggested include extending the framework to 3‑D physics engines, optimizing the risk computation for real‑time execution, validating the approach with real‑world urban datasets and on‑vehicle experiments, and coupling the planner with advanced perception modules to create a complete autonomous driving stack capable of handling dense pedestrian traffic safely and efficiently.
Comments & Academic Discussion
Loading comments...
Leave a Comment