Performance Characterization Using AoI in a Single-loop Networked Control System
The joint design of control and communication scheduling in a Networked Control System (NCS) is known to be a hard problem. Several research works have successfully designed optimal sampling and/or control strategies under simplified communication mo…
Authors: Jaya Prakash Champati, Mohammad H. Mamduhi, Karl H. Johansson
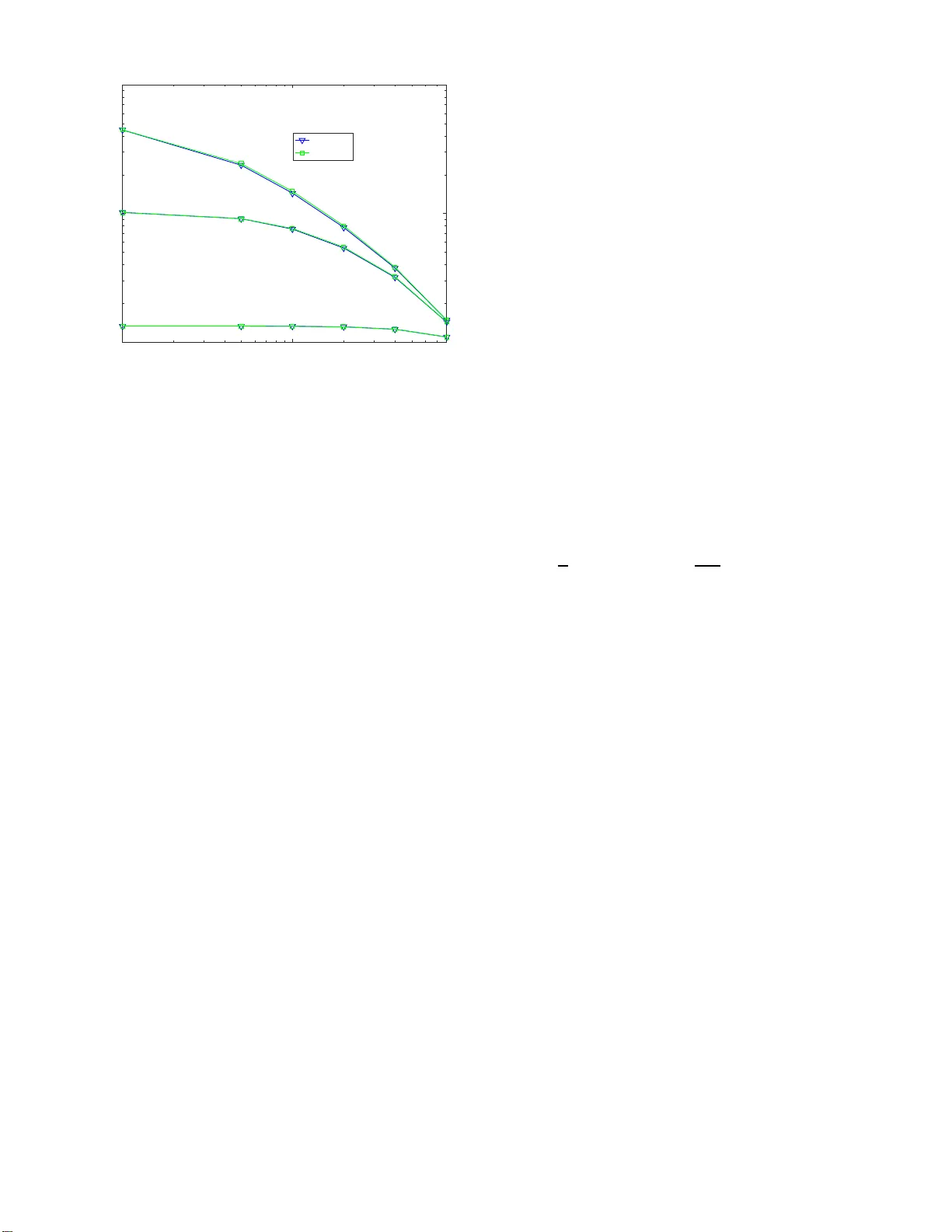
Performance Characte rizati on Using AoI in a Single-loop Network ed Control System Jaya Prakash Champati ∗ , Mohammad H. Mamduhi † , Karl H. Joh a nsson † , James Gross ∗ ∗ Division of I nformatio n Science and Engineering, EECS, KTH Royal I nstitute of T echnolo g y , Stockholm, Sweden † Division of Au tomatic Con trol, EECS, KTH Royal I n stitute of T echn o logy , Stockholm, Swed en { jpra,ma mduhi,k allej,jamesgr } @kth.se Abstract —The joint design of control and com munication scheduling in a Networked Control S ystem (NCS) i s known to be a hard pr oblem. Sev eral research w orks ha ve successfully designed optimal sampling and/or control strategies under simpli- fied communication models, wher e transmission delays/times ar e negligible o r fixed. Howe ver , considering sophi sticated communi- cation models, with rand om transmission times, result in h ighly coupled and difficult-to-solve optimal design problems due to the parameter inter -dep en dencies between estimation/control and communication layers. T o t ackl e this pr oblem, in this wor k, we in- vestigate the applicability of Age-of-Information (AoI) for solving control/estimation problems in an NCS und er i.i.d. transmission times. Our motivation f or this inv estigation stems from the fo llowing facts: 1) recent re sults i ndicate that AoI can be tackled under relativ ely sophisticated communication models, and 2) a lower AoI in an NCS may result in a lower estimation/cont rol cost. W e stud y a join t op t i mization of sampling and scheduling fo r a single-loop stochastic L TI networked system wi th the objectiv e of mini mizing the time-av erage squared norm of the estimation error . W e first show that u nder mild assumptions on informa tion structure the optimal contro l poli cy can be designed independ en tly fr om the samplin g and scheduli ng policies. W e then d eriv e a key result that mini mizin g the estimation error is equivalent to minimizing a functi on of AoI when the sampling decisions are independ ent of the state of the L TI system. N otin g that min imizing the function of AoI is a stochastic combinatorial optimization problem and is hard to solv e, we re sort to h euristic algorithms obtained by extending existing algorithms in the AoI literature. W e also id entify a cl ass of L TI system dynamics fo r whi ch min imizing the estimation error is equivalent to minimizing the expected AoI. I . I N T R O D U C T I O N In the recent past, there ha s b een a n ever incr easing in terest in stud ying Networked Control Systems (NCS) that suppo rt time-critical-co ntrol-loo p app lications which include, among many others, smar t g r ids, Internet- of-Thin g s (IoT), sensor networks an d aug mented rea lity [1], [2]. In such ap plications a status upd ate that is received after certain du r ation of its generation time may b ecome stale at th e recei ver and the control decision taken based on this stale sample m a y lead to untimely fee dback and hence und esired contro l actio n. Thus, the fr eshness of th e status u pdates at the receiver plays a key role in th e design of such sy stems wh erein time is more critical at th e receiving end . Even th ough NCSs have bee n studied extensively from the contro l perspec tive focusing on optim izing contro l per- This work has been partial ly supported by the Swedish Research Council VR unde r grant 2016-04404, and Knut and Alice W alle nberg Fou ndatio n. forman ce, m ajority o f th e work s have considered design- ing sampling an d/or control strategies over s implified net- working/com munication mod els with idealized assumptions wherein status updates are assumed to h ave zero or con stant transmission d elay . Even f o r the fu ndamental p roblem of Minimum Mean Square Erro r (MMSE) estimation, resu lts are scarce for co mputing op timal ev ent-based sam pling strategies when the tr ansmission delays in the network between the sampler and th e estimator are i.i.d . Th is can be attr ibuted to the complicated parameter inter -depen d encies between estima- tion/contr o l and co mmunicatio n layers, that arise due to the end-to- end delay , resulting in a highly coupled and d ifficult-to- solve o ptimal d esign pro blems [3]. H owever , as th e emerging networked co ntrol applicatio ns are en vision ed to be runn in g on th e ed ge in f u ture wireless ne twork s, it is n ecessary to consider mo re realistic communication models wh erein th e transmission delays in the n etwork are non -negligible an d random . Recently , the Age of I n formatio n (AoI) metric, propo sed in [ 4], has emerged as a novel metric to q uantify th e fr eshness of the receiv ed status updates and has attracted significant attention fro m com munication and n etworking com munity . I t is defined as the time elapsed since the generation of the latest succ e ssfully received status up d ate at the destination. Sev eral works have studied the p roblem of m inimizing some function of Ao I under different queuing and communica tio n models [5]–[9]. While the works in [5]–[7] consider time av er- aged AoI, the authors in [8] consider minimizing th e tail of the AoI, and the autho rs in [9] co nsider any no n -decreasing and measurable function of AoI. Apart f rom studying the ef fects of commun ication sch eduling on Ao I, none of the above works consider estimation/con trol o bjectiv es in n etworked systems. Nonetheless, we would like to no te th at: 1) All the above works minim ize some functio n of Ao I assuming the transmission time s are either i.i.d . o r Markovian. 2) A gen e ral consensus is that, a lower AoI in an NCS may result in a lower estimation/con trol cost, because having access to f resher state info rmation ofte n improves the estimation/con tr ol pe r forman c e. While item 1) suggests that AoI could be tackled und e r rela- ti vely sophisticated comm unication m odels, item 2) sugg ests that the solution s p roposed for AoI co uld be consider ed f o r WůĂŶƚƉƌŽĐĞƐƐ ;>d/^LJƐƚĞŵͿ ^ĞŶƐŽƌ ĐƚƵĂƚŽƌ ŽŶƚƌŽůůĞƌ ŽŵŵƵŶŝĐĂƚŝŽŶ EĞƚǁŽƌŬ N ƐƚŝŵĂƚŽƌ Q Q Q Fig. 1: Sing le-loop n etwork contro l sy stem . studying estimation/contro l costs. Gi ven the above facts, the question we would like to pursue is wheth er the sche d uling strategies prop osed in the Ao I literatu re, u nder sop histicated commun ication models, could be used or e xtended to minimize estimation/con tr ol costs in an N CS. Answerin g this que stion will not on ly shed light o n the p otential use of sche d uling strategies propo sed in the Ao I literature for networked control, but further m otiv ates the work on the AoI metric u nder mo re realistic com munication mode ls. Howe ver, to ach iev e this, we need a precise und erstanding of the re la tio nship between AoI and estimation/contr ol costs in networked sy stem s. The autho rs in [ 10] have studied the MMSE p roblem with i.i.d. transmission de lays fo r Wiener process estimatio n . Th ey have shown that th e estimation erro r is a function of AoI if the sampling decisions are independen t of the observed W einer process; oth erwise, the e stimation erro r is not a functio n of AoI. Following this line of research, in this paper we examine the relation between AoI and a typica l co n trol cost for a Linear-T im e -Inv arian t (L TI) system. In p articular, we co nsider a single-loop L TI stoc h astic networked sy stem , shown in Fig- ure 1, where the n ext state of the system is a linear f u nction of the curr e nt state, the co n trol input and a n associated Gau ssian noise. The system is e quipped with an e ven t-based sensor that decides about th e n ext sampling instant. Th e samples/status updates are delivered to an estimato r by a com munication link having random tr ansmission time per status u p date. The freshness of the status up dates r eceiv ed at the estimato r is a function of the sampling policy , co mmunicatio n schedulin g policy , and th e distribution of the tran smission times. Using the received u pdates, th e estimato r comp utes the curren t state of the plant and feeds it to a controller that com putes the contr o l input, which is in stantaneously av ailab le at the actuato r an d the feedbac k loo p is closed. W e first note that under s ome mild assumptions on th e informa tio n structures of the co n trol unit and the sampling unit, the optimal c o ntrol p o licy can be designed ind e pendently from th e samplin g p olicy , and then the optimal sam pling po licy minimizes a function of mean square e stimation error [11]. W e then show that the latter objective function can be expressed as a functio n o f AoI. Having these, we derive the optima l design for the sing le - loop NCS with the cost as a fun ction of AoI. Noting th at min imizing the fu nction of AoI in our prob lem setting is a stochastic combinato rial optimiza tio n p roblem a n d is h ard to solve, we study heuristic algo r ithms by extending existing algo r ithms in th e Ao I literatu r e [9]. The rest of this pape r is organized as follows. Section II introd uces the prob lem statement and the overall system model. Sec tio n II I pr esents the main results on perfor mance characterizatio n in terms of A o I an d heuristics to solve the problem . Numerical results are presented in Section IV , and we conclud e the pa p er in Section V . I I . P RO B L E M S T A T E M E N T W e study a single- loop NCS, shown in Fig u re 1, wh ere a single non- scalar con trolled linear time-inv ariant system closes the loop between th e plant ( c o llocated with the sensors) and the controller (co llocated with the estimator) through a commun ication network. Th e link from the con tr oller to the plant is supposed to be a direct e rror-free conn ection sending the contro l signals to th e actuator in a timely mann er . The system time is slotted and n ∈ Z ≥ 0 denotes a time slot, where Z ≥ 0 is th e set of n on-negative integers. The L TI system ev olves linearly as follows: X n = AX n − 1 + B U n − 1 + W n − 1 , (1) where X n ∈ R d is the state of the system at time slot n , d is the system dim e n sion, U n ∈ R q represents the con trol input, and W n ∼ N (0 , Σ) ∈ R d is the exogenou s noise having multi-variate Gaussian d istribution with ze r o m ean and covariance Σ . The constant matrices A ∈ R d × d and B ∈ R d × q represent the system an d input m atrices, respectively . The noise realizations are assumed to be mu tually ind ependen t and ide ntically Gaussian distrib uted, he n ce, we can re-write Σ = σ 2 I d , where I d is a d × d iden tity matrix an d σ 2 is the variance. In add ition, we assume that the noise realizations are ind ependen t from the in itial co ndition X 0 , which itself is presumed to be selecte d from any arbitrary rando m distribution with finite mo ments. A sensor samples the state of the system ac c o rding to a sampling po licy g , wh ich specifies the time slots in which samples are generated . The samples are submitted to a work- conservin g server , e.g., a commu nication link, which can stor e them in a queu e. The server tr ansmits th e samples/packets to the co ntrol unit, that consists of an estimator a nd a con troller , using a non -preemp tive schedulin g po licy π . The scheduling policy π decide s when a packet that is queued will be transmitted. Th e transmission link between the co ntroller and the actuato r is assumed to be p erfect, i.e., the actuator receives the control signal as so o n as the contr o l inp ut is executed. W e use k to denote the ind ex of a sample that is received k th in the order at the recei ver . Let Y k ∈ { 0 , 1 , 2 , . . . } denote the transmission time of the samp le k . W e assume that Y k ’ s are i.i.d. f or all k , an d E [ Y ] < ∞ . W e use D k to den ote the departur e time of sample k . In th is work, we co nsider both samplin g and scheduling policies are statio nary randomized policies. Un der a station- ary randomized po licy , the decision in slot n is completely determined by the tr ansmission time of the most rec e ntly transmitted pac ket and som e fixed probab ility mea sure. W e formalize th is definition shortly in Sec tio n II I. Let G SR and Π SR denote the set of all stationary r andomize d sampling po licies and stationary ran domized schedu ling policies, respectively . In time step n , let δ n represent the sampler ’ s decision either to sample th e state o f the system or not, i.e., δ n = ( 1 , X n is sampled , 0 , otherwise . At the control unit, we denote the age of information at time n by ∆ n = n − T n , wh ere T n is the most recent gen e ration time of any packet that is receiv ed by time n . Note th at ∆ n depend s on th e samp lin g p o licy . Also, we note that ∆ n increases by a u nit step in each time slot un til the departure of some p a cket and it d rops to a v alu e equal to the system delay of th at p acket. In [1 2], [ 13] the nec e ssary condition s fo r the op timal con- troller to be of the certainty equ i valence (CE) fo rm are der i ved for the NCS scenar io w ith state-based sensor data samp ling. Inspired by the m e n tioned works, we use their r esults to show that th e optimal con trol p olicy in our prob le m can be considered to be in the class of CE control un der so m e mild assumptions on the informatio n stru cture. It is discussed in [12] that the optimal con tr ol is CE if 1) the sampling decision δ n at every time-step n is indepen dent o f the ap p lied co ntrol inputs { U 0 , . . . , U n − 1 } , and , 2) an error-free instantan eous ac- knowledgement ch annel exists b e tween contro l an d sampling sides to info rm the sam pler about data delivery status. More precisely , the mentioned conditions guaran tee independence of the sampling decisions from th e control actions. Assuming that the sampler has access to th e full plan t inf ormation together with the in stantaneous data delivery ac knowledgment fr o m the controller, the sampler can reconstruct the statistics of the input signals by an estimator installed a t the sampling side . A s we confine ou r attention to the class o f stationary ran domized policies, the sam pler can be assumed to be dep endent on the primitive param eters of the sy stem, i.e., { X 0 , W 0 , . . . , W n } , the co nstant paramete r s A, B , Σ , and th e schedu ling o utcome throug h the acknowledgement while any depe ndency on th e control inputs app ears in statistical f orm co mputed at the sampler . T h erefore, we can rely on the results of [12], [13] on the optim ality of CE co n troller assuming that the samp ler has access to the mentioned informatio n set and a time ly acknowledgement signal is exchanged b etween co ntroller an d sampler . The op tim al control po licy can th en be expr essed in form of ce r tainly eq uiv alen ce co n trol as fo llows : U n = − K n E [ X n |I n ] , (2) where K n is the optimal co n trol gain, an d I n = { X 0 , U 0 , . . . , U n − 1 , ∆ n , X n − ∆ n } is the controller info rmation history at tim e -step n . It should be noted tha t any po ssible design of the sampler neither affects the contr o l law no r th e control gain K n , but affects the estimation precision E [ X n |I n ] . Moreover , due to the independ e nce of the design of the control law from the samplin g process, we can design the control inp ut optimally accor d ing to the desired optimality criteria, e.g. LQG control (see [13] fo r detailed derivation of the op tim al control gain based o n LQG control). This a ffects only the contro l gain K n , and we o m it it for th e purpo se of brevity . T he compu ted control signal is fe d back to the actuator and we can th en express the closed-loo p dyna m ics a s fo llows: X n = ( A − B K n − 1 ) X n − 1 + B K n − 1 X n − 1 − ˆ X n − 1 + W n − 1 . The estimator at the control side computes the estimation E [ X n |I n ] . T o derive the dy namics o f the estimator, let us first derive the dy namics of the system state X n as a f unction of the de fined ag e of infor mation ∆ n . Using (1) we co nclude X n = A ∆ n X n − ∆ n + ∆ n X j =1 A j − 1 W n − j (3) + B U n − 1 + AB U n − 2 + . . . + A ∆ n − 1 B U n − ∆ n T aking the expectatio n from the expression (3) cond itioned on I n , the estimated system state ˆ X n can b e expr essed as ˆ X n = E [ X n |I n ] = A ∆ n X n − ∆ n (4) + B U n − 1 + AB U n − 2 + . . . + A ∆ n − 1 B U n − ∆ n . Using (3) an d (4), we can co mpute the estima tio n error e n at the estimato r side as follows: e n = X n − ˆ X n = ∆ n X i =1 A i − 1 W n − i . (5) W e ar e interested in find in g station ary rand omized policies g an d π that minimize the time-average squ ared er ror n orm, i.e., we aim to solve P , wh ere P : minimize ( g ∈G SR ,π ∈ Π SR ) lim n →∞ 1 n n − 1 X j =0 k e j k 2 2 . Our go al is to establish a co ncrete relation between the objective fun ction of P 1 and ∆ n . In particula r, we show tha t solving P is equivalent to minimizing a specific fun c tio n of ∆ n . Given this equivalence, we use alg orithms from the Ao I literature to solve P . I I I . J O I N T O P T I M I Z A T I O N O F S A M P L I N G A N D S C H E D U L I N G P O L I C I E S Note that und er the sampling policy g , a sample can be generated in any time slot. Howe ver, there is no advantage in generating samp les a n d stor in g th e m in a que u e while a samp le is being tr ansmitted. T o see this, from (4) and (5) we in fer that the estimation of the system state using a recen t state results in a lower err or th an that o f using an older state. Thus, whe n the transmission of a packet is finished, sampling th e current state and transmitting the packet r esults in lower error than 1 In the domain of stationary randomiz ed polic ies conside red in this pape r , ∆ n is stationary and er godic . This is also t rue for the erro r proce ss e n , giv en in (5), which turns out to be stationary and ergodic. Thus, the limit in the object i ve of P exists. transmitting older pa ckets stored in the queue. Therefo re, π is degenerate and the samples are nev er queue d . The samp ling policy th e n can be defined as g , { G k , k ≥ 1 } , where G k is a decision variable which represen ts th e number of time slots th e system waits b efore genera ting a new sample k after the transmission of sam ple ( k − 1) . W e a ssum e that G k ∈ { 0 , 1 , . . . , M } f or all k , where M < ∞ denotes th e maximu m waiting time tolerate d by the system 2 . Under a causal sampling policy g , G k is de termined by the ob servations { Y i , i ≤ k } and previous decision s { G i , i ≤ k − 1 } . Let G den ote the set of all causal policies. A stationary random ized po licy is a cau sal policy under which G k is assigned a value from { 0 , 1 , . . . , M } based on Y k − 1 and a fixed prob ability measure. I n th e following we formally define the stationary r andomized po licies G SR . G SR , { g ∈ G : ∀ a ∈ { 0 , 1 , . . . , M } , P { G k ≤ a | Y k − 1 = y } is indepen d ent of k } . Theorem 1. P is equ ivalent to ˜ P , almost sur ely , wher e ˜ P : min g ∈G SR E [ f (∆)] s.t. G k ∈ { 0 , 1 , . . . , M } , ∀ k . wher e th e functio n f : Z ≥ 0 → R + , and is g iven b y , f (∆) = ∆ − 1 X i =0 T r A i ⊤ A i Σ , T r ( · ) is th e trace op erator , a nd E [ f (∆)] = E h P Y k − 1 + G k + Y k − 1 j = Y k − 1 P j − 1 i =0 T r A i ⊤ A i Σ i E [ Y k + G k ] . (6 ) Pr oof. The proo f is g i ven in the Appen dix. The result in Theor em 1 asserts th a t m inimizing th e time av eraged sq uare err or norm is equiv alen t to minimizing the expected value of a spec ific fu n ction of AoI, i.e. f (∆) , with parameters A Σ . In the following coro llary we present a condition under which the so lution of ˜ P is eq uiv alen t to minimizing the expected AoI E [∆] . Corollary 1. The optima l solution of ˜ P is e quivalent to minimizing the e x pected Ao I E [∆] if ther e e xists a constant γ ∈ R + such that f ( j ) = j − 1 X i =0 T r A i ⊤ A i Σ = γ j, ∀ j. (7) Pr oof. One can show that the expected Ao I for sam pling policy g = { G k , k ≥ 1 } is g i ven by , E [∆] = E h P Y k − 1 + G k + Y k − 1 j = Y k − 1 j i E [ G k + Y k ] . (8) 2 For the sake of simplicity in expositio n we abuse the notati on by using G k , which actually is a mapping from the domain of the sampling polic y g , at the departure insta nt of sample k , to { 0 , 1 , . . . , M } . Therefo re, th e result follows by substituting (7) in (6), and (8). Remark 1. Th e class of orthogo nal matrices satisfy con dition (7) and ther efor e, meet the r equir ement of Cor ollary 1 . T o show this, we r eca ll th at any orthogonal ma trix M , M ⊤ = M − 1 holds, and h ence M ⊤ M = I . In addition, ( M r ) ⊤ = ( M ⊤ ) r holds for o rthogonal matrices. Havin g these equ alities together with the conditio n (7) results in j X i =1 T r M i ⊤ M i Σ = j X i =1 T r ( M ⊤ M | {z } I ) i Σ ! = j X i =1 T r (Σ) = j T r (Σ) Hence, ther e always exists γ = T r (Σ) , ∀ j . It is worth notin g that fo r the scalar case, A ∈ { 1 , − 1 } ar e the only va lues tha t satisfy co ndition (7). Remark 2. Assuming that th e A matrix is orthogo nal r esults in having a stochastic lossless o pen-loo p linear system, i. e. r emoving the contr o l fr om the equa tion (1), any increase in the mean size of the sys tem state would corr espond to stochastic noise. In fact, without any con tr ol input ¯ U n − 1 , we have E [ k X n k 2 ] = E [ k X n − 1 k 2 ] + Σ . This means even without co ntr ol, such a stochastic system is mean-sq uar e bound ed if Σ and X 0 ar e b oth bound ed. Having contr ol r esults naturally in tigh ter bound s. Removing noise fr om the system (1), i.e having a d eterministic system, and if A is orthogonal we have a linea r system tha t is mar ginally stable, i.e. k X n k 2 = k X n − 1 k 2 . Adding contr ol to the noiseless system with orthogon al A matrix, u nder contr ollab ility of the pa ir ( A, B ) , any stab ilizing contr oller r esults in a n asymptotically stable clo sed-loop system. Heuristic Alg orithms for Solving ˜ P : From Th eorem 1 solving ˜ P is equivalent to solv ing P , an d thus we aim to solve ˜ P . Howev er , since G k are discrete variables, ˜ P is a stochastic combin atorial o ptimization pr oblem, which is ha rd to s olve, in general. Therefore, we aim f or go od h e uristic solutions by first solving ˜ P by replacing the constraint with G k ∈ [0 , M ] , a n d then r ound the r esulting G k values. T o this end, we u se th e algorithms propo sed in [ 9] 3 , where the authors h ave stu d ied the pro blem o f min imizing the expected value of any non-negative and non-d ecreasing fun ction of AoI with G k ∈ [0 , M ] . Note that f ( · ) is no n-negative and non- decreasing function , howe ver , the op timality r esults in [9] are not directly a pplicable to ˜ P as the decision variable G k are discrete. Th e heuristic solu tions we study ar e described below . • Minimizing Expected Ao I Solution (MEAS) : In this heuristic we use [Algor ithm 2, [9]] to co mpute G k . I n [Algorithm 2, [9]], whenever the tran smission of packet ( k − 1 ) is c o mpleted, G k is computed using the observed transmission time y of that packet, or mor e formally using 3 Recent ly , the authors in [14 ] proposed improve d algorith ms for a more general ized version of the problem studied in [9]. Y k − 1 = y . For th e sake of com pleteness, in Algorithm 1 , we presen t the d etails of comp utation of G k . Algor ithm 1 outputs continu ous values for G k , i.e., G k ∈ [0 , M ] for all k . W e rou nd the values by using the floor f unction. Algorithm 1 : Algo r ithm for comp uting G k 1: given l = 0 , su fficiently large u , toleranc e ǫ 2: repeat 3: β : = ( l + u ) / 2 4: G k = ma x( β − y , 0) 5: o : = E ( Y k + G k ) 2 − 2 β E [ Y k + G k ] . 6: if o ≥ 0 , u : = β ; e lse , l : = β . 7: until u − l ≤ ǫ 8: Compu te G k = ma x( β − y , 0) . 9: return G k • Zero-wait po licy : Unde r the zero -wait policy , a new packet is generated and im mediately transmitted only when the pr evious pac ket finishes its tr ansmission. W e no te that [ A lg orithm 1, [ 9]] can also be used to obtain a heuristic solution for P . Howev er , in our simulation we foun d that any trivial implemen tation of an extension of [ A lg orithm 1, [ 9]] for finding a heuristic solutio n for ˜ P resu lts in a solu tion equiv alent to zero-wait policy . Therefor e, we leave the non- trivial exten sio n of that algorithm for future work . I V . N U M E R I C A L R E S U LT S In this section, we present our initial numerical results, where we study MEA S and zer o-wait po licies, and co mpare their perf ormance under geometric transmission time distribu- tion with succ ess prob ability p . W e consider sing le dimension system d = 1 , i.e., A is a scalar . W e observed similar results for d = 2 which are n ot pre sen ted due to redun dancy . In Figure 2, we present th e solution provided b y MEAS by plotting G k versus y , for different p values. W e truncate the x-axis values at y = 10 . W e observe that for smaller values o f p , waiting times are larger . For example, when p = 0 . 1 , we compute G k > 0 , fo r a ll y ≤ 8 , an d G k = 7 , if Y k = 1 . T o interpret this, when the pr o bability of success is low and if the pr evious tran smission happen s successfully in fewer time slots than expected, then it is beneficial to wait bef ore the next transmission. Under zero-wait policy , the expected AoI for geometric service tim e s can be com puted as follows: E [∆] = E [ Y 2 k ] 2 E [ Y k ] + E [ Y k ] − 1 2 = 4 − p 2 p − 1 2 . W e note that th e co nstant 1 2 appears in th e ab ove expression as ∆ n in our system model is a discrete-time function . In T able I, we com pare the time-average square d err or achieved by MEAS and zero- wait p olicy for A = 1 . Since A = 1 satisfies condition (7), for this case solving P is eq uiv alen t to minimizing E [∆] (cf. Cor o llary 1), and we expect the solution 1 2 3 4 5 6 7 8 9 10 y 0 1 2 3 4 5 6 7 G k p = 0 . 1 p = 0 . 2 p = 0 . 25 p = 0 . 5 Fig. 2: W aiting time function g ( y ) of MEAS algo r ithm. provided by MEAS to b e near op timal. Note that MEAS provides lower value than zer o-wait p olicy , but the d ifference is n o t significan t. T ABLE I: Com parison of time-av erage squared error under zero-wait po licy an d MEAS alg o rithm for A = 1 . p Zero wait MEAS 0.01 1 99 189.15 0.05 39 37.22 0.1 19 18.21 0.2 9 8.70 0.4 4 4 0.8 1.5 1.5 In Figure 3, we com p are M EAS and zero-wait policy for A values less than 1 . W e ag a in observe th e same trend as b efore. W e conclud e that, for geometric transmission tim e distribution zero-wait po licy is fav o rable as it has lower comp utational complexity and achie ves time-average squared er ror th at is negligibly close to th at o f M E AS. Finally , we n ote that for A v alues gr eater th an 1 , the time-average squ a red error approa c h es infinity . V . C O N C L U S I O N S A N D F U T U R E W O R K The mo ti vation for this work is to inves tigate the applica b il- ity of the strategies/solutions p roposed in the AoI literature to typical estimation/con trol pr oblems in NCSs. As a first step, in this work, we have stud ied the join t o ptimal samp ling an d scheduling po licies o f a single- loop stochastic L TI n etworked system. Th e main con tribution has b een in character izing the est imation error as a function of AoI. More pr ecisely , for the giv en system model with a single source, i.i.d. ser - vice/transmission time s and event-based sampling, we have shown that minimizin g the time -av erage squar ed no rm of the estimation err or is equ i valent to minimizing E [ f (∆)] , wh ere f is a no n-negative and n on-decr easing f unction with para m eters A (the L TI matrix) and Σ (the no ise covariance). Mo r eover , it 10 -2 10 -1 p 10 0 10 1 10 2 Time-avg. squared error MEAS Zero wait A = . 99 A = . 95 A = . 50 Fig. 3: Time average squar ed er r or u nder different algor ithms for varying p an d different A values. is d iscussed that certainty eq uiv alen ce controllers can be real- ized und er certain assumptions o n the inf ormation stru ctures av ailab le for the co ntrol unit an d the samp lin g unit. Furth e r, we have pr ovided a c o ndition f or A u nder wh ich min im izing the time averaged square norm is eq uiv alen t to min imizing expected AoI. Noting that minimizin g E [ f (∆)] is a stochastic combinato rial optimization pro b lem, we resort to studying heuristic algorithm s MEAS (an extension of Algor ithm 2 [9]) and the zero-wait po licy . Our initial n umerical r esults show that, un der geometr ic serv ic e time distribution, the zero- wait po licy , d espite h aving lower computational complexity , achieves o nly slightly higher estima tio n error in compar iso n with MEAS. W e lea ve the compr e hensive nume r ical analysis studying different heuristic solutions u nder different service-time d is- tributions for futu re work. W e also aim to fin d heu r istics solutions with perfor mance gu arantees, for solvin g ˜ P . R E F E R E N C E S [1] J. Baillieu l and P . J. Antsaklis, “Control and communic ation challenge s in networke d real-time systems, ” Pr oceedings of the IEEE , vol. 95, no. 1, pp. 9–28, Jan 2007. [2] R. A. Gupta and M. Chow , “Netwo rked control system: Ove rvie w and research trends, ” IEEE T ransac tions on Industrial Electr onics , vol. 57, no. 7, pp. 2527–2 535, July 2010. [3] M. Chiang, S. H. Low , A. R. Calderbank, and J. C. Doyle, “Layering as optimizatio n decomposition: A mathematica l theory o f network archit ecture s, ” P r oceedings of the IEEE , vol. 95, no. 1, pp. 255–312, Jan 2007. [4] S. Kaul, M. Gruteser , V . Rai, and J. K enne y , “Minimizing age of informati on in ve hicula r networks, ” in Proc. IEEE SECON , 2011. [5] S. Kaul, R. Y ates, and M. Grutese r , “Real-t ime status: How often should one update?” in Pr oc. IEEE INFOCOM , 2012. [6] R. D. Y at es and S. Kaul, “Re al-ti me status updat ing: Multiple sources, ” in P r oc. IEEE ISIT , 2012. [7] R. D. Y ates, “Lazy is timely: Status updates by an energy harvesti ng source, ” in Pro c. IEEE ISIT , 2015. [8] J. P . Champati, H. Al-Zubaidy , and J. Gross, “Stati stical guarantee optimiza tion for age of information for the D/G/1 queue, ” in Proc . IEE E INFOCOM W orkshop , April 2018, pp. 130–135. [9] Y . S un, E. Uysal-Biy ikog lu, R. D. Y ate s, C. E . Koksal, and N. B. Shrof f, “Update or wait: How to ke ep your data fresh, ” IEEE T ransact ions on Informatio n Theory , vol . 63, no. 11, pp. 7492–7508, Nov 2017. [10] Y . Sun, Y . Polyanskiy , and E . Uysal-Bi yik oglu, “Remote estimat ion of the wiener process over a channel with random delay , ” in Pro c. IEEE ISIT , 2017. [11] D. Maity , M. H. Mamduhi, S. Hirche , K. H. Johansson, and J. S. Baras, “Optimal LQG con trol under delay- depende nt costly informa tion, ” IEEE Contr ol Systems Letters , vol . 3, no. 1, pp. 102–107 , Jan 2019. [12] C. Ramesh, H. Sandberg , and K. H. Johansson, “Design of state- based schedulers for a netwo rk of control loops, ” IEEE T ransactions on Automatic Contr ol , v ol. 58, no. 8, pp. 1962–1975, Aug 2013. [13] A. Molin and S. Hirche, “On the optimality of certain ty equi v alence for ev ent-triggered control systems, ” IEE E T ransactions on Automatic Contr ol , vol. 58, no. 2, pp. 470–474, Feb 2013. [14] Y . Sun and B. Cyr , “Sampling for data freshness optimizat ion: Non- linea r age funct ions, ” CoRR , vol. abs/18 12.07241, 2018. [15] J. P . Champati, H. Al-Zubaidy , and J. Gross, “On the distrib ution of AoI for the GI/GI/1/1 and GI/GI/1/2* systems: Exact expressions and bounds, ” in Pr oc. IEEE INFOCOM , 2019. [16] A. Kumar , D. Manju nath, and J. Kuri, Communication Netwo rking: A n Analytic al Appr oac h . Morgan Kaufmann Publishe rs Inc., 2004. A P P E N D I X A. Pr oof of Theo r em 1 Since E [ Y ] < ∞ , and Z k < M for all k , numb er of samples transmitted goe s to infinity as n goes to infinity . Therefo re, we divide the time line using inter-departure times { D k − D k − 1 , k ≥ 1 } , a nd ref ormulate th e ob jectiv e fun c tio n as f ollows: lim n →∞ 1 n n − 1 X j =0 k e j k 2 2 = lim K →∞ 1 D K K X k =1 D k − 1 X j = D k − 1 k e j k 2 2 , (9) where D 0 = 0 , and the inter-departur e time is given by D k − D k − 1 = Y k + G k . Recall that Y k ’ s are i.i.d. Und er a station ary ran domized policy , G k only dep ends on Y k − 1 , and thus G k ’ s ar e also i.i. d . Therefo re, ( D k − D k − 1 ) ’ s are i.i.d as well, ∀ k . Let ζ k , P D k − 1 j = D k − 1 k e j k 2 2 . In th e following we show that the r andom variables ζ k are id entically distributed a nd ζ k is indepen d ent o f { ζ i , i ≤ k − 2 } . W e note that, for j = D k − 1 we have ∆ D k − 1 = Y k − 1 , because at the departure instant of sample ( k − 1) AoI r educes to sample ( k − 1) ’ s waiting time in queue, which is zero, plu s its transmission time Y k − 1 . Sin ce AoI increases by one in each time slot until next d eparture it is easy to see that for j = D k − 1 , ∆ D k − 1 = Y k − 1 + G k + Y k − 1 . Therefo re, f o r D k − 1 ≤ j ≤ D k − 1 , we have e j = ∆ j X i =1 A i − 1 W j − i = Y k − 1 + j − D k − 1 X i =1 A i − 1 W j − i . From the above an alysis and using a change of variable, we obtain ζ k = D k − 1 X j = D k − 1 k e j k 2 2 = Y k − 1 + G k + Y k − 1 X j = Y k − 1 k e j k k 2 2 , (10) where e j k = j X i =1 A i − 1 W D k − 1 + j − Y k − 1 − i . Note that ζ k is a fun c tion of Y k − 1 , G k , Y k and { W i , D k − 1 − Y k − 1 ≤ i ≤ D k − 1 + G k + Y k − 1 } . It is easy to see that ζ k are identically distributed. Further, sinc e Y k are i.i.d., G k is a function of Y k − 1 and W i are i.i.d, we infer that ζ k is indepen d ent o f { ζ i , i ≤ k − 2 } . Giv en the ab ove prop e rties o f { ζ k } an d { D k − D k − 1 } , we use th e extended renewal r eward theor em [Theorem 2 [ 15]] and obtain the fo llowing resu lt. lim K →∞ 1 D K K X k =1 ζ k = E [ ζ k ] E [ D k − D k − 1 ] a.s. (11) Using (1 1), (10) an d (9), we obtain lim n →∞ 1 n n − 1 X j =0 k e j k 2 2 = E [ P Y k − 1 + G k + Y k − 1 j = Y k − 1 k e j k k 2 2 ] E [ Y k + G k ] a.s. (12) For 1 ≤ r ≤ d , let e j k ( r ) denote the r th element of th e vector e j k . Let a ( i ) ( r , l ) den ote the elemen t in r th row and l th column of the matrix A i , and w i ( r ) denote th e r th elemen t of the vector W i . No te that, for all r , e j k ( r ) is a linear combinatio n of i.i.d . Gaussian random variables. Th erefore e j k ( r ) is G a u ssian w ith zero mean and variance σ 2 e jk ( r ) = σ 2 j X i =1 d X l =1 [ a ( i − 1) ( r , l )] 2 . (13) This im p lies that for any j and k , k e j k k 2 2 is χ 2 -distributed and E [ k e j k k 2 ] = d X r =1 σ 2 e jk ( r ) . (14) Now , we h av e E Y k − 1 + G k + Y k − 1 X j = Y k − 1 k e j k k 2 2 = E E Y k − 1 + G k + Y k − 1 X j = Y k − 1 k e j k k 2 2 Y k − 1 , Y k = σ 2 E Y k − 1 + G k + Y k − 1 X j = Y k − 1 j X i =1 d X r =1 d X l =1 [ a ( i − 1) ( r , l )] 2 = E Y k − 1 + G k + Y k − 1 X j = Y k − 1 j − 1 X i =0 T r A i ⊤ A i Σ (15) In th e seco nd step a b ove, we have used (13) and ( 14). In the last step we have used Σ = σ 2 I d . From from (12) and (15), we have, alm ost surely , lim n →∞ 1 n n − 1 X j =0 k e j k 2 2 = E h P Y k − 1 + G k + Y k − 1 j = Y k − 1 P j − 1 i =0 T r A i ⊤ A i Σ i E [ Y k + G k ] . (16) T o finish the pr oof it is sufficient to show that E [ f (∆)] is equal to (16). Since ∆ n is stationary and ergod ic, by Birk hoffs ergodic theorem [ 16], almost sur ely , E [ f (∆)] = lim n →∞ 1 n n − 1 X j =0 f (∆ j ) = lim K →∞ 1 D K K X k =1 D k − 1 X j = D k − 1 f (∆ j ) . (17) T o simplify (17), we use step s similar to that used in deriv- ing ( 12) fro m (9), and obtain lim K →∞ 1 D K K X k =1 D k − 1 X j = D k − 1 f (∆ j ) = E h P Y k − 1 + G k + Y k − 1 j = Y k − 1 f ( j ) i E [ Y k + G k ] . Hence th e result is proven.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment