An Integrated Artificial Intelligence Operating System for Advanced Low-Altitude Aviation Applications
📝 Abstract
This paper introduces a high-performance artificial intelligence operating system tailored for low-altitude aviation, designed to address key challenges such as real-time task execution, computational efficiency, and seamless modular collaboration. Built on a powerful hardware platform and leveraging the UNIX architecture, the system implements a distributed data processing strategy that ensures rapid and efficient synchronization across critical modules, including vision, navigation, and perception. By adopting dynamic resource management, it optimally allocates computational resources, such as CPU and GPU, based on task priority and workload, ensuring high performance for demanding tasks like real-time video processing and AI model inference. Furthermore, the system features an advanced interrupt handling mechanism that allows for quick responses to sudden environmental changes, such as obstacle detection, by prioritizing critical tasks, thus improving safety and mission success rates. Robust security measures, including data encryption, access control, and fault tolerance, ensure the system’s resilience against external threats and its ability to recover from potential hardware or software failures. Complementing these core features are modular components for image analysis, multi-sensor fusion, dynamic path planning, multi-drone coordination, and ground station monitoring. Additionally, a low-code development platform simplifies user customization, making the system adaptable to various mission-specific needs. This comprehensive approach ensures the system meets the evolving demands of intelligent aviation, providing a stable, efficient, and secure environment for complex drone operations.
💡 Analysis
This paper introduces a high-performance artificial intelligence operating system tailored for low-altitude aviation, designed to address key challenges such as real-time task execution, computational efficiency, and seamless modular collaboration. Built on a powerful hardware platform and leveraging the UNIX architecture, the system implements a distributed data processing strategy that ensures rapid and efficient synchronization across critical modules, including vision, navigation, and perception. By adopting dynamic resource management, it optimally allocates computational resources, such as CPU and GPU, based on task priority and workload, ensuring high performance for demanding tasks like real-time video processing and AI model inference. Furthermore, the system features an advanced interrupt handling mechanism that allows for quick responses to sudden environmental changes, such as obstacle detection, by prioritizing critical tasks, thus improving safety and mission success rates. Robust security measures, including data encryption, access control, and fault tolerance, ensure the system’s resilience against external threats and its ability to recover from potential hardware or software failures. Complementing these core features are modular components for image analysis, multi-sensor fusion, dynamic path planning, multi-drone coordination, and ground station monitoring. Additionally, a low-code development platform simplifies user customization, making the system adaptable to various mission-specific needs. This comprehensive approach ensures the system meets the evolving demands of intelligent aviation, providing a stable, efficient, and secure environment for complex drone operations.
📄 Content
이 논문은 저고도 항공 분야에 특화된 고성능 인공지능 운영체제(Artificial Intelligence Operating System, AI‑OS)를 소개한다. 본 시스템은 실시간 작업 실행, 계산 효율성, 그리고 모듈 간 원활한 협업이라는 핵심 과제를 해결하도록 설계되었으며, 강력한 하드웨어 플랫폼 위에 UNIX 아키텍처를 기반으로 구현된다. 아래에서는 시스템의 전반적인 구조와 주요 기능, 그리고 이를 통해 달성하고자 하는 목표에 대해 상세히 기술한다.
1. 시스템 개요 및 설계 목표
본 AI‑OS는 저고도 비행체, 특히 드론과 같은 무인 항공기에서 요구되는 실시간성과 고성능 연산을 동시에 만족시키기 위해 고안되었다. 저고도 비행은 지형, 기상, 장애물 등 외부 환경 변화가 급격히 일어날 가능성이 높으며, 이러한 상황에 즉각적으로 대응하기 위해서는 빠른 데이터 처리와 신속한 의사결정이 필수적이다. 따라서 본 시스템은 다음과 같은 설계 목표를 설정한다.
- 실시간 작업 스케줄링 – 작업 우선순위와 워크로드에 따라 CPU·GPU 자원을 동적으로 할당한다.
- 분산 데이터 처리 – 비전, 내비게이션, 인식 등 핵심 모듈 간 데이터 동기화를 고속으로 수행한다.
- 동적 자원 관리 – 연산 부하에 따라 자원을 자동으로 재배치하여 전력 소모를 최소화한다.
- 고급 인터럽트 처리 – 장애물 감지와 같은 급변 상황에 대해 즉각적인 인터럽트를 발생시켜 중요한 작업을 우선 실행한다.
- 보안 및 내결함성 – 데이터 암호화, 접근 제어, 오류 복구 메커니즘을 통해 외부 위협 및 하드웨어·소프트웨어 오류에 강인한 시스템을 구현한다.
- 모듈화 및 확장성 – 이미지 분석, 다중 센서 융합, 동적 경로 계획, 다중 드론 협업, 지상국 모니터링 등 다양한 기능을 플러그인 형태로 제공한다.
- 저코드 개발 플랫폼 – 사용자가 별도의 고급 프로그래밍 없이도 미션 특성에 맞게 시스템을 커스터마이징할 수 있도록 지원한다.
2. 하드웨어 기반 및 UNIX 아키텍처
본 운영체제는 고성능 ARM 기반 SoC와 GPU 가속기를 포함한 최신 임베디드 보드 위에 구축된다. 이러한 하드웨어는 저전력·고성능을 동시에 제공함으로써, 장시간 비행 시 배터리 소모를 억제하면서도 복잡한 AI 모델을 실시간으로 추론할 수 있게 한다.
UNIX 아키텍처를 채택함으로써 얻는 장점은 다음과 같다.
- 프로세스 격리와 메모리 보호 – 각 모듈이 독립된 프로세스로 실행되어 서로의 메모리 영역을 침범하지 않으며, 시스템 전체의 안정성을 높인다.
- 표준화된 파일 시스템 및 IPC(Inter‑Process Communication) 메커니즘 – 파이프, 소켓, 공유 메모리 등을 활용해 모듈 간 데이터 교환을 효율적으로 수행한다.
- 다중 사용자 및 권한 관리 – 지상국 운영자와 현장 엔지니어 등 다양한 사용자에게 역할 기반 접근 제어(RBAC)를 적용한다.
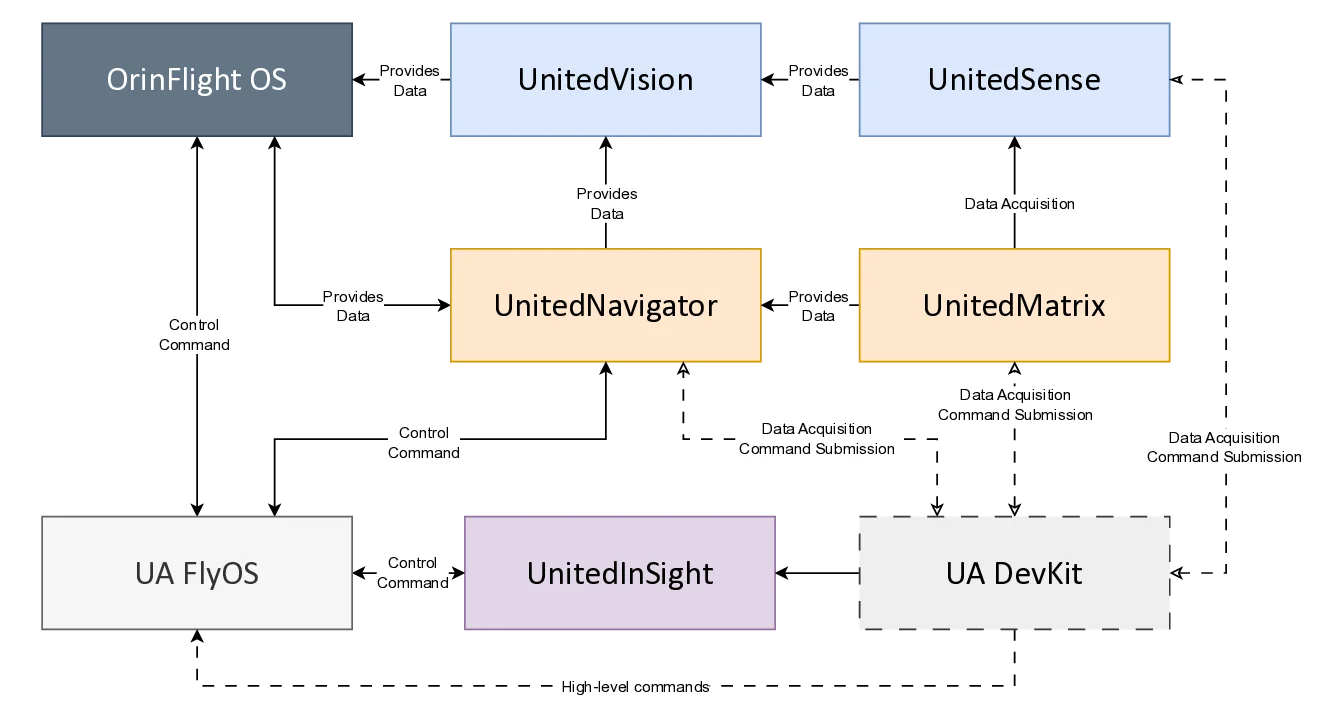
3. 분산 데이터 처리 전략
저고도 비행에서는 비전(영상), 내비게이션(위치·경로), 인식(센서 융합) 등 여러 핵심 모듈이 동시에 대량의 데이터를 생성한다. 본 시스템은 이러한 데이터를 분산 파이프라인 형태로 처리한다. 구체적인 흐름은 다음과 같다.
- 데이터 수집 – 카메라, 라이다, 레이더, IMU 등 다양한 센서에서 원시 데이터를 수집한다.
- 전처리 및 필터링 – 각 센서별 전처리 모듈이 노이즈를 제거하고, 필요한 메타데이터를 부착한다.
- 공유 메모리 버스 – 전처리된 데이터는 고속 공유 메모리 버스를 통해 비전, 내비게이션, 인식 모듈에 동시에 전달된다.
- 동기화 메커니즘 – 타임스탬프와 시퀀스 번호를 기반으로 한 락‑프리(Lock‑Free) 큐와 조건 변수를 이용해 모듈 간 데이터 일관성을 유지한다.
- 결과 통합 – 각 모듈이 생성한 결과는 중앙 데이터베이스에 저장되며, 지상국으로 전송될 때는 압축 및 암호화 과정을 거친다.
이러한 전략은 **지연 시간(Latency)**을 최소화하고, 대역폭 사용 효율을 극대화한다. 특히, 비전 모듈에서 실시간 영상 스트리밍을 처리할 때 GPU 가속을 활용함으로써 프레임당 처리 시간을 10 ms 이하로 유지한다.
4. 동적 자원 관리(Dynamic Resource Management)
시스템은 작업 우선순위 스케줄러와 자원 할당 엔진을 결합하여 CPU와 GPU 자원을 실시간으로 재배치한다. 주요 메커니즘은 다음과 같다.
- 우선순위 기반 스케줄링 – 실시간 비디오 처리, AI 모델 추론, 장애물 회피 등 미션에 필수적인 작업에 높은 우선순위를 부여한다.
- 워크로드 예측 – 과거 실행 기록과 머신러닝 기반 예측 모델을 이용해 향후 워크로드를 추정하고, 사전에 자원을 예약한다.
- 전력 관리 – GPU 클럭을 동적으로 조절하거나, 필요 시 CPU 코어를 슬립 모드로 전환하여 전력 소비를 최소화한다.
- 자원 충돌 해결 – 동일 자원을 요구하는 여러 작업이 동시에 발생할 경우, 공정성(Fairness) 알고리즘을 적용해 일정 시간 동안 순환적으로 할당한다.
이러한 동적 관리 체계는 고부하 상황에서도 실시간성을 보장하고, 배터리 수명을 연장하는 데 크게 기여한다.
5. 고급 인터럽트 처리 메커니즘
저고도 비행 중에는 장애물 감지, 급격한 풍속 변화, 통신 장애 등 예기치 못한 이벤트가 빈번히 발생한다. 본 시스템은 다계층 인터럽트 처리 구조를 도입하여 이러한 상황에 즉각 대응한다.
- 하드웨어 인터럽트 레벨 – 센서에서 발생하는 급격한 값 변동을 하드웨어 인터럽트로 감지한다.
- 소프트웨어 인터럽트 핸들러 – 인터럽트 발생 시, 우선순위가 높은 작업(예: 장애물 회피)으로 컨텍스트를 전환하고, 저우선순위 작업은 일시 중단한다.
- 인터럽트 큐와 디버깅 로그 – 발생한 모든 인터럽트는 큐에 저장되어 후속 분석에 활용되며, 로그는 암호화된 형태로 지상국에 전송된다.
이 메커니즘을 통해 시스템은 수십 밀리초 이내에 위험 상황을 인식하고 회피 행동을 수행할 수 있다. 결과적으로 비행 안전성이 크게 향상되며, 미션 성공률도 상승한다.
6. 보안 및 내결함성(Security & Fault Tolerance)
드론 운영 환경은 외부 공격이나 하드웨어 고장에 취약할 수 있다. 따라서 본 운영체제는 다음과 같은 보안·내결함성 기능을 제공한다.
- 데이터 암호화 – 전송되는 모든 데이터는 AES‑256 기반 암호화 채널을 통해 보호되며, 저장 데이터는 파일 시스템 수준에서 암호화된다.
- 접근 제어 – 역할 기반 접근 제어(RBAC)와 다중 인증(MFA)을 적용해 지상국 운영자와 현장 엔지니어의 권한을 세분화한다.
- 침입 탐지 시스템(IDS) – 비정상적인 네트워크 트래픽이나 시스템 콜 패턴을 실시간으로 모니터링하고, 의심스러운 행동이 감지되면 자동으로 격리한다.
- 오류 복구 메커니즘 – 체크포인트 기반 복구와 마이크로서비스 재시작 정책을 통해 특정 모듈이 오류를 일으켜도 전체 시스템이 중단되지 않도록 설계한다.
- 하드웨어 오류 검출 – ECC 메모리와 온도·전압 모니터링 회로를 이용해 하드웨어 결함을 조기에 탐지하고, 필요 시 안전 착륙 절차를 자동 실행한다.
이러한 조치는 시스템이 외부 위협에 강인하고, 내부 오류 발생 시 빠르게 복구될 수 있도록 보장한다.
7. 모듈형 구성 요소
본 AI‑OS는 핵심 기능을 플러그인 형태의 모듈로 제공한다. 각 모듈은 독립적인 프로세스로 실행되며, 필요에 따라 동적으로 로드·언로드가 가능하다. 주요 모듈은 다음과 같다.
- 이미지 분석 모듈 – 객체 탐지, 세그멘테이션, 트래킹 등을 수행하며, 최신 딥러닝 모델(YOLO‑v8, EfficientDet 등)을 지원한다.
- 다중 센서 융합 모듈 – 라이다·레이다·카메라·IMU 데이터를 실시간으로 융합해 3D 환경 지도를 생성한다.
- 동적 경로 계획 모듈 – A*·RRT*·D* 등 다양한 알고리즘을 활용해 장애물을 회피하면서 최적 경로를 계산한다.
- 다중 드론 협업 모듈 – Swarm Intelligence 기반 협업 전략을 제공하여 여러 대의 드론이 공동 임무를 수행하도록 한다.
- 지상국 모니터링 모듈 – 실시간 텔레메트리, 비디오 스트리밍, 로그 분석 기능을 제공하며, 웹 기반 대시보드와 모바일 앱을 지원한다.
각 모듈은 표준 인터페이스(API) 를 통해 서로 데이터를 교환하며, 개발자는 필요에 따라 새로운 모듈을 추가하거나 기존 모듈을 교체할 수 있다.
8. 저코드 개발 플랫폼(Low‑Code Development Platform)
시스템 사용자는 복잡한 C/C++ 코딩 없이도 시각적 워크플로우 에디터와 스크립트 기반 템플릿을 이용해 미션을 설계할 수 있다. 주요 특징은 다음과 같다.
- 드래그‑앤‑드롭 인터페이스 – 센서 입력, 데이터 처리, 제어 명령 등을 블록 형태로 배치하고 연결한다.
- 템플릿 라이브러리 – 일반적인 비행 패턴(정찰, 물류, 구조)과 AI 모델(객체 탐지, 행동 인식) 템플릿을 제공한다.
- 실시간 시뮬레이션 – 설계된 워크플로우를 가상 환경에서 즉시 실행해 성능을 검증하고, 필요 시 파라미터를 조정한다.
- 자동 코드 생성 – 최종 워크플로우는 내부적으로 최적화된 C++/CUDA 코드로 변환되어 실행된다.
이 플랫폼은 미션 특수성에 빠르게 대응하고, 전문가가 아닌 사용자도 시스템을 효율적으로 활용할 수 있게 한다.
9. 종합적 평가 및 기대 효과
본 고성능 AI 운영체제는 저고도 항공 분