Exploring How Non-Prehensile Manipulation Expands Capability in Robots Experiencing Multi-Joint Failure
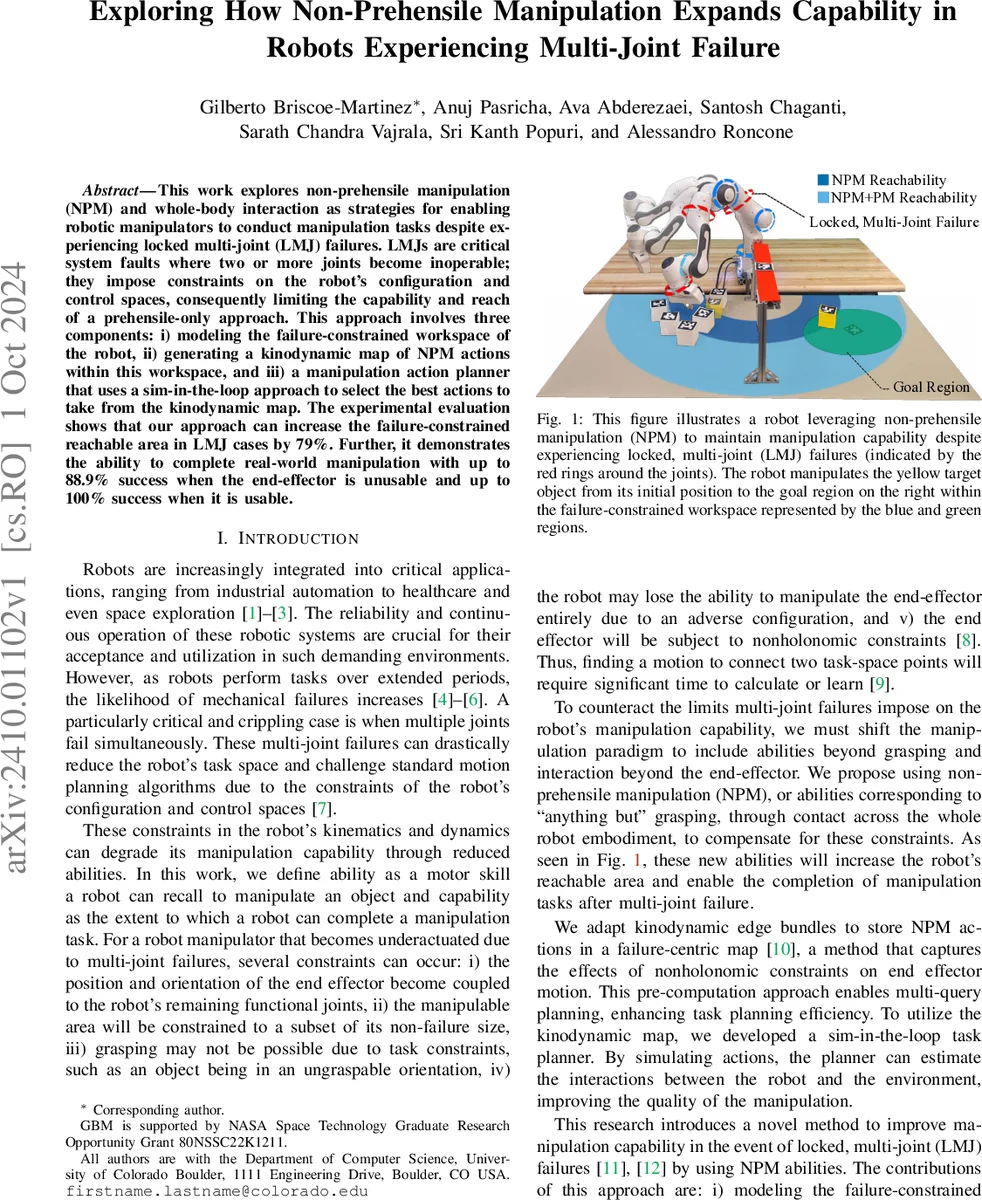
This work explores non-prehensile manipulation (NPM) and whole-body interaction as strategies for enabling robotic manipulators to conduct manipulation tasks despite experiencing locked multi-joint (LMJ) failures. LMJs are critical system faults where two or more joints become inoperable; they impose constraints on the robot’s configuration and control spaces, consequently limiting the capability and reach of a prehensile-only approach. This approach involves three components: i) modeling the failure-constrained workspace of the robot, ii) generating a kinodynamic map of NPM actions within this workspace, and iii) a manipulation action planner that uses a sim-in-the-loop approach to select the best actions to take from the kinodynamic map. The experimental evaluation shows that our approach can increase the failure-constrained reachable area in LMJ cases by 79%. Further, it demonstrates the ability to complete real-world manipulation with up to 88.9% success when the end-effector is unusable and up to 100% success when it is usable.
💡 Research Summary
This paper addresses a critical gap in robotic manipulation: the ability to continue operating when multiple joints become locked (Locked Multi‑Joint failures, LMJ). Traditional approaches rely exclusively on prehensile actions—grasping with the end‑effector—and quickly become infeasible once the robot loses degrees of freedom. The authors propose a three‑stage framework that leverages whole‑body, non‑prehensile manipulation (NPM) to restore capability.
First, they model the “failure‑constrained workspace” (FCW) that results from a specific set of locked joints. The workspace is discretized into 2 cm cells; for each cell an inverse kinematics (IK) solver checks whether a feasible prehensile pose exists. If IK fails, the algorithm perturbs the target within an ε‑ball and retries. After a predefined number of attempts, the system relaxes the prehensile constraints and switches to NPM by allowing contact points on the hand, wrist, or forearm, and by ignoring orientation constraints. The outcome is a “Reach‑Ability Map” that quantifies which regions remain reachable and which contact modalities are viable under the given failure.
Second, the authors construct a failure‑centric kinodynamic map. They treat the constrained configuration space (C_c) and control space (U_c) as manifolds and generate Monte‑Carlo edge bundles: random start states within the FCW, random control inputs sampled from U_c, and random durations. Each rollout simulates the robot’s dynamics, checks for torque limits, collisions, and velocity constraints, and stores the resulting state trajectory as an edge if it remains valid. This collection of edges approximates the reachable subset of C_c and provides a pre‑computed library of feasible motions that respect the altered kinematics imposed by LMJ.
Third, a simulation‑in‑the‑loop planner selects actions from the kinodynamic map to achieve a task goal. Three selection strategies are explored: Random (uniform sampling), Lazy (minimal simulation, detailed verification only when needed), and Greedy (full simulation of each candidate and immediate selection of the highest‑scoring action). The planner runs a physics simulator for each candidate to predict object motion (the authors focus on a poking primitive) and evaluates success criteria such as object placement within a goal region.
Experimental validation uses a Franka Emika Panda arm with two LMJ scenarios (two joints locked, three joints locked). The NPM approach expands the reachable area by an average of 79 % compared with a purely prehensile baseline. When the end‑effector is completely unusable, the system achieves 88.9 % task success; when the end‑effector remains partially usable, success reaches 100 %. These numbers contrast sharply with the 0–30 % success rates observed for prehensile‑only methods under the same failures.
Key contributions include: (1) a systematic method to model and quantify the post‑failure workspace, (2) a kinodynamic edge‑bundle generation technique that pre‑computes feasible whole‑body actions under severe kinematic constraints, and (3) a simulation‑in‑the‑loop planner that balances computational cost and success probability. The work demonstrates that whole‑body NPM can dramatically increase robustness to multi‑joint failures without requiring pre‑failure re‑planning or analytical inverse kinematics for every failure permutation.
Limitations are also acknowledged. The study focuses solely on a poking primitive; extending the framework to a richer set of NPM actions (sliding, rolling, pushing) may be non‑trivial. The approach relies heavily on the fidelity of the physics simulator; discrepancies between simulated and real contact dynamics could degrade performance in unstructured environments. Real‑time fault detection and dynamic re‑configuration are not integrated, so the system assumes that the failure mode is known beforehand. Finally, experiments are confined to tabletop manipulation tasks, leaving open questions about performance in cluttered 3D spaces or with moving obstacles.
Future work should explore (i) expanding the NPM primitive library, (ii) learning‑based correction models to bridge the simulation‑to‑reality gap, (iii) integrating online fault diagnosis with the planning pipeline, and (iv) testing the framework on more complex tasks and robot platforms. By addressing these challenges, the proposed methodology could become a cornerstone for building truly fault‑tolerant, autonomous manipulators capable of maintaining functional utility even after severe mechanical degradation.
Comments & Academic Discussion
Loading comments...
Leave a Comment