TickTalk -- Timing API for Dynamically Federated Cyber-Physical Systems
Although timing and synchronization of a dynamically-changing set of elements and their related power considerations are essential to many cyber-physical systems (CPS), they are absent from today’s programming languages, forcing programmers to handle these matters outside of the language and on a case-by-case basis. This paper proposes a framework for adding time-related concepts to languages. Complementing prior work in this area, this paper develops the notion of dynamically federated islands of variable-precision synchronization and coordinated entities through synergistic activities at the language, system, network, and device levels. At the language level, we explore constructs that capture key timing and synchronization concepts and, at the system level, we propose a flexible intermediate language that represents both program logic and timing constraints together with run-time mechanisms. At the network level, we argue for architectural extensions that permit the network to act as a combined computing, communication, storage, and synchronization platform and at the device level, we explore architectural concepts that can lead to greater interoperability, easy establishment of timing constraints, and more power-efficient designs.
💡 Research Summary
The paper “TickTalk – Timing API for Dynamically Federated Cyber‑Physical Systems” addresses a fundamental gap in current programming languages: the lack of first‑class constructs for expressing timing and synchronization requirements in distributed, time‑sensitive cyber‑physical systems (CPS). The authors argue that as smart‑city, IoT, and related applications proliferate, developers must frequently coordinate actions across geographically dispersed nodes (e.g., cameras, sensors, actuators) that may be owned by different parties and have heterogeneous capabilities. Existing approaches typically require programmers to handle timing outside the language, leading to ad‑hoc solutions, difficult verification, and poor power efficiency.
To solve this, the authors propose a multi‑layered framework called TickTalk that introduces timing concepts at four levels: language, system, network, and device. At the language level, new primitives allow developers to annotate code with explicit temporal intent (e.g., “execute at 4 pm” or “synchronize within 1 µs”). These annotations are compiled into a flexible intermediate language (IL) that represents both functional logic and timing constraints as a data‑flow graph. Each node in the graph corresponds to an instance of a code block placed on a specific “ensemble” (a logical grouping of compute, storage, communication, and timing resources). Edges capture data dependencies and also carry “synchronization tokens” that enforce timing relationships at runtime.
The system layer introduces a Runtime Manager (RTM) that orchestrates code‑block placement, determines the appropriate reference clocks, and handles dynamic migration of blocks among ensembles (cloud, fog, edge). The RTM uses feedback from the network to adjust synchronization precision and to minimize jitter. The network layer advocates extending existing precision‑time protocols (e.g., PTP/IEEE‑1588) with multi‑level synchronization: devices need not stay continuously synchronized to UTC; instead, they can operate in a low‑power, loosely‑synchronized mode and only engage high‑precision synchronization when a timing‑critical operation is imminent. This “just‑in‑time” approach reduces communication overhead and conserves battery life for energy‑harvesting or battery‑powered nodes.
At the device level, the authors introduce the notion of clock virtualization. When multiple applications share a physical sensor or actuator, each application’s code block may require a different reference clock (different frequency, phase, or epoch). By virtualizing clocks per code block, the runtime can reconcile conflicting timing requirements without resorting to heavyweight OS‑level virtualization. This also enables multi‑tenancy: the system can detect timing conflicts, attempt to harmonize them, and, if impossible, signal an error to the programmer.
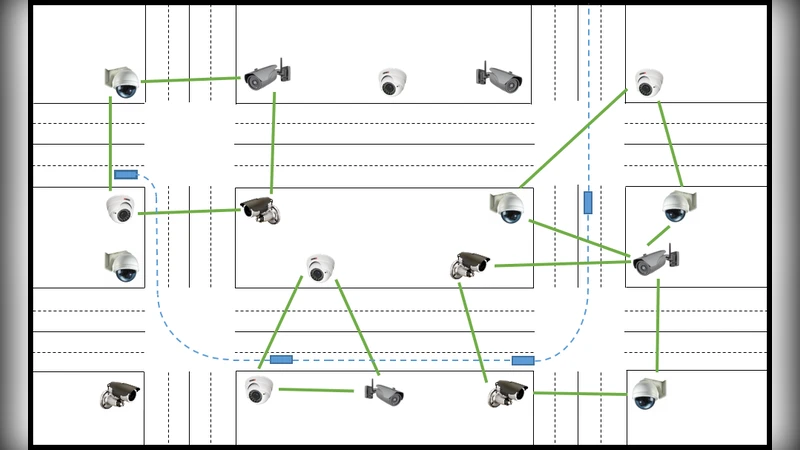
A concrete example is presented: tracking a moving truck using dynamically recruited city‑wide cameras. The pseudocode shows a loop that repeatedly queries nearby sensors, requests them to capture images synchronized to 1 µs, assembles a 3‑D model, predicts the next position, and repeats. The example illustrates challenges such as dynamic federation, variable‑precision synchronization, and the need for both intra‑island and inter‑island timing coordination.
Key insights from the paper include:
- Dynamic islands of variable‑precision synchronization are essential for scalable CPS; static hierarchies are insufficient.
- Explicit timing in the programming model enables formal verification of temporal properties, moving timing from a performance concern to a correctness criterion.
- A unified intermediate representation that couples data flow with timing tokens provides a clean abstraction for compilers, optimizers, and runtime schedulers.
- Power‑aware synchronization (low‑precision baseline with high‑precision bursts) is crucial for battery‑operated devices.
- Clock virtualization and multi‑tenancy allow heterogeneous devices to be safely shared among competing applications without manual conflict resolution.
Overall, TickTalk proposes a comprehensive stack—from language constructs to hardware support—that allows developers to “program time” directly, simplifying the creation of dynamically federated CPS, improving power efficiency, and facilitating verification and interoperability across diverse devices and networks.
Comments & Academic Discussion
Loading comments...
Leave a Comment