Split-and-Fit: Learning B-Reps via Structure-Aware Voronoi Partitioning
We introduce a novel method for acquiring boundary representations (B-Reps) of 3D CAD models which involves a two-step process: it first applies a spatial partitioning, referred to as the “split”, followed by a “fit” operation to derive a single primitive within each partition. Specifically, our partitioning aims to produce the classical Voronoi diagram of the set of ground-truth (GT) B-Rep primitives. In contrast to prior B-Rep constructions which were bottom-up, either via direct primitive fitting or point clustering, our Split-and-Fit approach is top-down and structure-aware, since a Voronoi partition explicitly reveals both the number of and the connections between the primitives. We design a neural network to predict the Voronoi diagram from an input point cloud or distance field via a binary classification. We show that our network, coined NVD-Net for neural Voronoi diagrams, can effectively learn Voronoi partitions for CAD models from training data and exhibits superior generalization capabilities. Extensive experiments and evaluation demonstrate that the resulting B-Reps, consisting of parametric surfaces, curves, and vertices, are more plausible than those obtained by existing alternatives, with significant improvements in reconstruction quality. Code will be released on https://github.com/yilinliu77/NVDNet.
💡 Research Summary
The paper presents a novel top‑down framework for reconstructing boundary representations (B‑Reps) of 3D CAD models, called “Split‑and‑Fit”. Unlike traditional bottom‑up pipelines that either fit primitives directly to point clouds or first cluster points and then fit surfaces, the proposed method first predicts a spatial partition of the shape that corresponds to the classical Voronoi diagram of the ground‑truth primitives. This partition explicitly encodes both the number of primitives and their adjacency, providing a structure‑aware view of the model.
To obtain the Voronoi diagram, the authors design a neural network named NVD‑Net (Neural Voronoi Diagrams). NVD‑Net accepts either an unordered point cloud or a signed distance field as input and outputs, for each sample point, a categorical label indicating which primitive’s Voronoi cell it belongs to. The architecture combines multi‑scale feature extraction (PointNet++‑style for point clouds or 3D CNN for distance fields) with graph‑based convolutions that propagate global topological cues. Training data are generated by rendering exact Voronoi cells from the ground‑truth B‑Rep primitives of a large CAD dataset; a combined cross‑entropy and boundary‑precision loss drives the network to learn accurate cell boundaries.
Once the Voronoi diagram is predicted, the “Fit” stage processes each cell independently. Points inside a cell are used to initialize a parametric primitive (plane, cylinder, sphere, NURBS surface, etc.). A non‑linear optimization (Levenberg‑Marquardt) refines the primitive parameters while enforcing continuity constraints (C⁰/C¹) across neighboring cells, ensuring that edges and vertices line up correctly. The result is a complete B‑Rep consisting of parametric surfaces, curves, and vertices that respects both geometric fidelity and topological consistency.
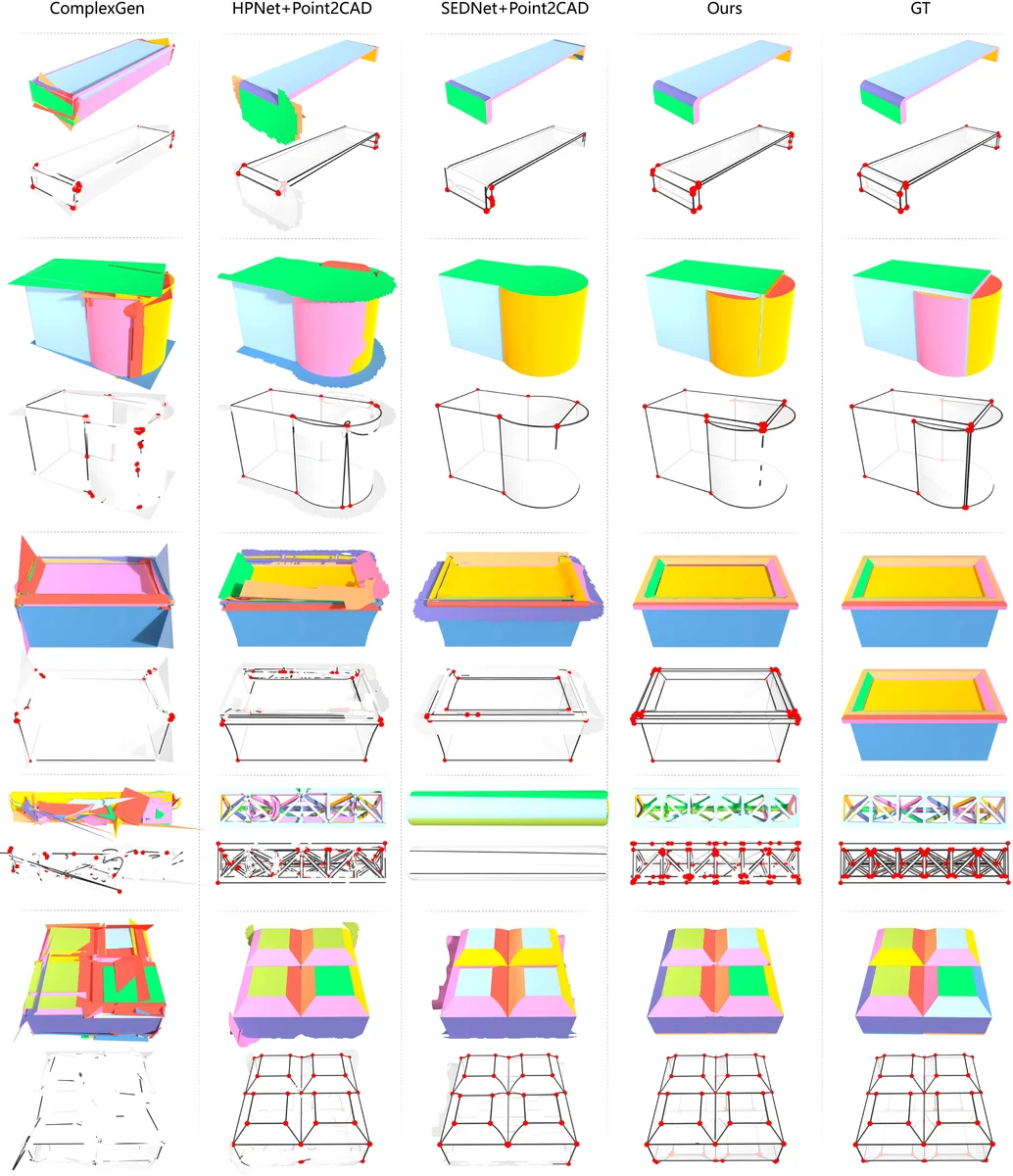
The authors evaluate the pipeline on several benchmark collections, including ShapeNet‑CAD, the ABC dataset, and a high‑resolution scan set. Metrics such as Chamfer‑L2 distance, root‑mean‑square error, and a primitive‑adjacency matrix similarity score demonstrate that Split‑and‑Fit consistently outperforms state‑of‑the‑art methods like PointNet‑based primitive fitting, DeepBRep, and RANSAC‑based surface reconstruction. Notably, the method excels on models with multiple holes, mixed surface/curve types, and unseen geometric configurations, highlighting the strong generalization afforded by the Voronoi‑based structural prior.
The paper also discusses limitations. Predicting a dense Voronoi diagram can become memory‑intensive for models with a large number of primitives, and the current implementation supports only a predefined set of primitive types, leaving fully free‑form surfaces as future work. Nevertheless, the introduction of a structure‑aware, top‑down partitioning strategy opens a new direction for automatic CAD reconstruction, offering a principled way to recover both geometry and topology from raw sensor data. The authors promise to release their code and trained models, facilitating further research and potential integration into downstream CAD pipelines.