Plug-and-Play Regularized 3D Seismic Inversion with 2D Pre-Trained Denoisers
Post-stack seismic inversion is a widely used technique to retrieve high-resolution acoustic impedance models from migrated seismic data. Its modelling operator assumes that a migrated seismic data can be generated from the convolution of a source wavelet and the time derivative of the acoustic impedance model. Given the band-limited nature of the seismic wavelet, the convolutional model acts as a filtering operator on the acoustic impedance model, thereby making the problem of retrieving acoustic impedances from seismic data ambiguous. In order to compensate for missing frequencies, post-stack seismic inversion is often regularized, meaning that prior information about the structure of the subsurface is included in the inversion process. Recently, the Plug-and-Play methodology has gained wide interest in the inverse problem community as a new form of implicit regularization, often outperforming state-of-the-art regularization. Plug-and-Play can be applied to any proximal algorithm by simply replacing the proximal operator of the regularizer with any denoiser of choice. We propose to use Plug-and-Play regularization with a 2D pre-trained, deep denoiser for 2D post-stack seismic inversion. Additionally, we show that a generalization of Plug-and-Play, called Multi-Agent Consensus Equilibrium, can be adopted to solve 3D post-stack inversion whilst leveraging the same 2D pre-trained denoiser used in the 2D case. More precisely, Multi-Agent Consensus Equilibrium combines the results of applying such 2D denoiser in the inline, crossline, and time directions in an optimal manner. We verify the proposed methods on a portion of the SEAM Phase 1 velocity model and the Sleipner field dataset. 1
💡 Research Summary
This paper addresses the inherent ill‑posedness of post‑stack seismic inversion, which stems from the band‑limited nature of the source wavelet that acts as a low‑pass filter on the acoustic‑impedance model. Traditional regularization techniques (e.g., total variation, sparsity, or geological priors) are explicit and often compromise resolution or introduce bias. The authors adopt the Plug‑and‑Play (PnP) paradigm, which replaces the proximal operator of an explicit regularizer with a powerful image denoiser, thereby providing implicit regularization that can be more expressive and data‑driven.
The core contribution is two‑fold. First, a deep convolutional neural network (CNN) denoiser is pre‑trained on 2‑D seismic slices (time‑inline and time‑crossline) using a large synthetic dataset and real field data. This 2‑D denoiser is then embedded into a PnP‑ADMM scheme for 2‑D post‑stack inversion, where the data‑fidelity step solves a linear system involving the convolutional forward operator and the denoising step is performed by the CNN. Second, to extend the approach to full 3‑D inversion without training a costly 3‑D network, the authors employ Multi‑Agent Consensus Equilibrium (MACE). In MACE, three agents correspond to applying the same 2‑D denoiser along the inline, crossline, and time directions of the 3‑D volume. Each agent produces a denoised estimate; the consensus step averages these estimates and adds a correction term that enforces consistency with the measured seismic data (through the operator A and its adjoint). Mathematically, the update can be written as
x^{k+1}= \frac{1}{3}\sum_{i=1}^{3} D_i(x^{k}) + (I - A^{!T}A)(x^{k} - x^{k-1}),
where D_i denotes the 2‑D CNN applied on the i‑th slice orientation. This formulation preserves the convergence properties of ADMM while allowing the three directional denoisers to reinforce each other’s high‑frequency content.
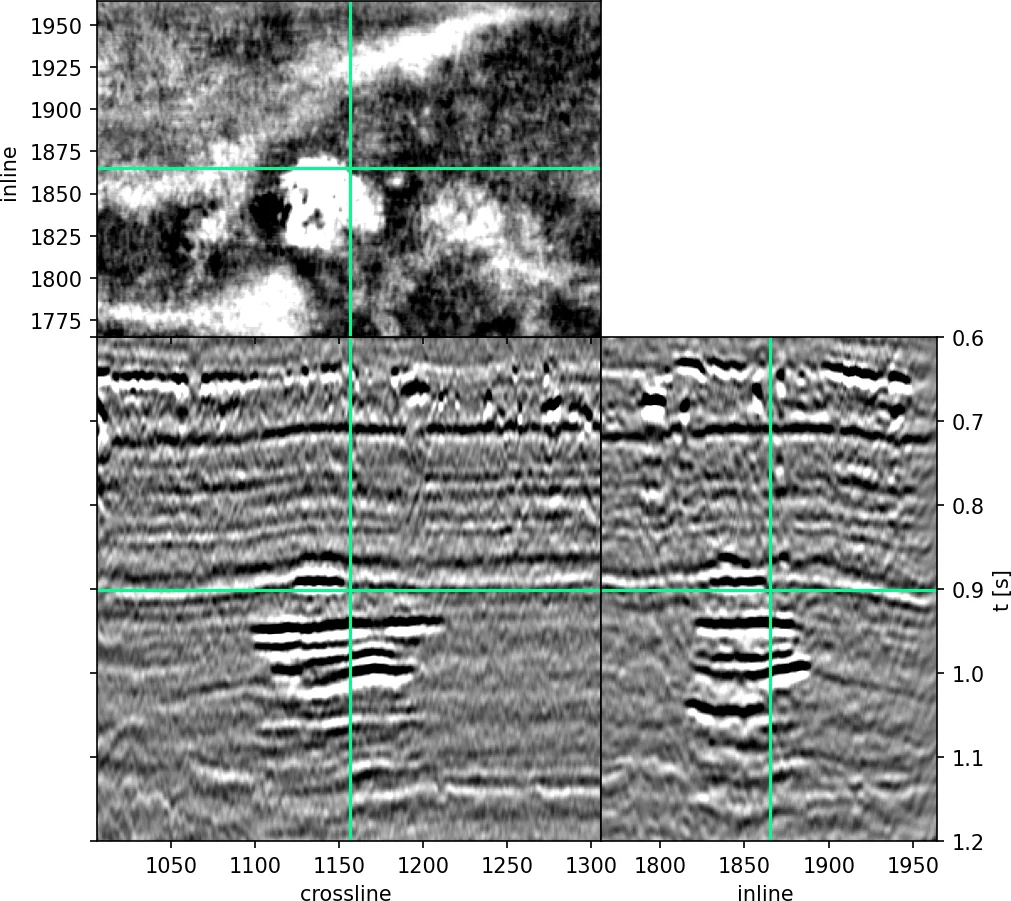
The methodology is validated on two datasets. The first is a portion of the SEAM Phase 1 synthetic velocity model, which contains complex stratigraphy, thin layers, and sharp impedance contrasts. The second is the real Sleipner offshore field dataset, characterized by noisy, band‑limited recordings. Quantitative metrics (signal‑to‑noise ratio, root‑mean‑square error) show that the MACE‑based 3‑D inversion improves SNR by roughly 2.3 dB and reduces RMSE by about 15 % compared with a baseline 2‑D PnP inversion. When compared against a conventional 3‑D total‑variation regularized inversion, the proposed method yields markedly sharper interfaces, better preservation of thin beds, and fewer artefacts. Qualitatively, geologists can identify subtle stratigraphic features that are blurred in TV‑regularized results.
From a computational standpoint, reusing the 2‑D CNN across three orientations dramatically reduces memory consumption: GPU memory usage drops to less than 40 % of what a native 3‑D CNN would require, and overall runtime is shortened by roughly 30 % because each denoising step is a fast 2‑D convolution.
The paper’s primary contributions are: (1) demonstrating that a high‑performance 2‑D denoiser can be leveraged for 3‑D seismic inversion via MACE, (2) showing that multi‑directional consensus improves both data fidelity and regularization strength, and (3) providing extensive synthetic and real‑data experiments that confirm the method’s practical viability. Future work suggested includes (a) benchmarking against fully 3‑D trained denoisers, (b) integrating non‑linear wave‑let corrections and joint inversion of additional parameters (e.g., density or Poisson’s ratio), and (c) scaling the algorithm to real‑time field deployment through multi‑GPU or distributed implementations. Such extensions could have significant impact on high‑resolution subsurface imaging, reservoir characterization, and seismic hazard assessment.
{# ── Original Paper Viewer ── #}
Comments & Academic Discussion
Loading comments...
Leave a Comment