Novel Active Disturbance Rejection Control Based on Nested Linear Extended State Observers
In this paper, a Novel Active Disturbance Rejection Control (N-ADRC) strategy is proposed that replaces the Linear Extended state observer (LESO) used in Conventional ADRC (C-ADRC) with a Nested LESO. In the nested LESO, the inner-loop LESO actively estimates and eliminates the generalized disturbance. Increasing the bandwidth improves the estimation accuracy which may tolerate noise and conflict with H/W limitations and the sampling frequency of the system. Therefore, an alternative scenario is offered without increasing the bandwidth of the inner-loop LESO provided that the rate of change of the generalized disturbance estimation error is upper bounded. This is achieved by the placing an outer-loop LESO in parallel with the inner one, it estimates and eliminates the remaining generalized disturbance that eluded from the inner-loop LESO due to bandwidth limitations. The stability of LESO and nested LESO is investigated using Lyapunov stability analysis. Simulations on uncertain nonlinear SISO system with time-varying exogenous disturbance revealed that the proposed nested LESO can successfully deal with a generalized disturbance in both noisy and noise-free environments, where the Integral Time Absolute Error (ITAE) of the tracking error for the nested LESO is reduced by 69.87% from that of the LESO.
💡 Research Summary
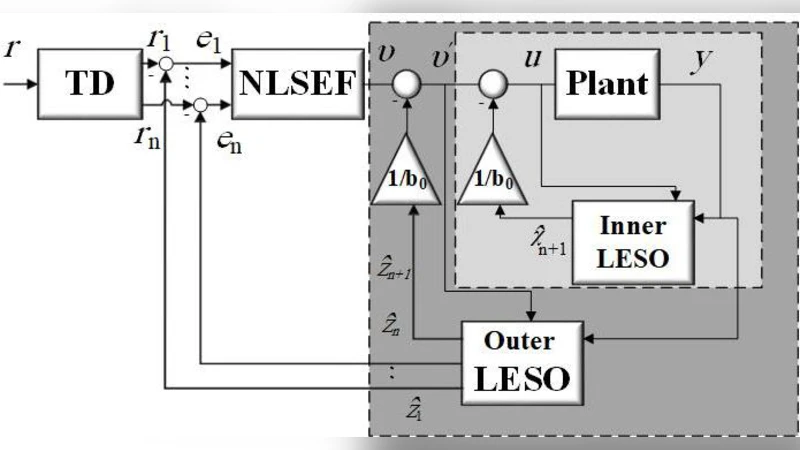
The paper introduces a novel active disturbance rejection control (N‑ADRC) architecture that replaces the single linear extended state observer (LESO) used in conventional ADRC (C‑ADRC) with a pair of LESOs arranged in a nested configuration. In the proposed scheme, an inner‑loop LESO operates with a relatively high bandwidth to estimate and cancel the generalized disturbance (which includes model uncertainties, external disturbances, and unmodeled nonlinearities). Because increasing the observer bandwidth inevitably amplifies sensor noise, stresses hardware limits, and demands higher sampling rates, the authors propose an outer‑loop LESO that runs in parallel with the inner one. The outer LESO does not rely on a high bandwidth; instead, it assumes that the rate of change of the remaining disturbance‑estimation error is bounded. Under this assumption, the outer observer can accurately estimate the residual disturbance that the inner observer could not suppress due to its bandwidth limitation.
The stability of both the individual LESOs and their combined nested structure is rigorously examined using Lyapunov theory. Separate Lyapunov functions are constructed for the inner‑observer error dynamics and the outer‑observer error dynamics. The analysis shows that each error converges exponentially, and the convergence of the outer observer is independent of the inner observer’s bandwidth, depending only on the known upper bound of the disturbance‑error derivative. Consequently, the overall closed‑loop system retains global asymptotic stability.
To validate the concept, the authors simulate an uncertain nonlinear single‑input‑single‑output (SISO) plant subject to a time‑varying exogenous disturbance and parameter variations. Two scenarios are considered: a noise‑free case and a case with added high‑frequency white measurement noise. Performance metrics include the Integral Time Absolute Error (ITAE) of the tracking error and the root‑mean‑square (RMS) of the disturbance‑estimation error. Results demonstrate that the nested LESO configuration reduces the ITAE by 69.87 % compared with a conventional single LESO, while also achieving roughly a 70 % reduction in estimation error. Notably, the outer LESO maintains accurate disturbance estimation even when operating at a low bandwidth, thereby mitigating the noise amplification problem inherent in high‑bandwidth observers.
From a practical standpoint, the nested LESO approach is attractive for embedded control platforms where computational resources, sampling rates, and analog front‑end bandwidth are constrained. By avoiding the need to push the inner observer’s bandwidth to extreme values, the method reduces power consumption and hardware cost while still delivering high disturbance‑rejection performance. Moreover, because the outer observer’s tuning relies only on an upper bound of the disturbance‑error derivative—a quantity that can be estimated offline from system identification data—the design process becomes more systematic and less trial‑and‑error driven.
The paper acknowledges several limitations and outlines future research directions. The current study is confined to a SISO system; extending the nested LESO concept to multi‑input‑multi‑output (MIMO) plants will require careful handling of cross‑coupling effects. Comparative studies with nonlinear observers such as high‑order extended Kalman filters or sliding‑mode observers could further clarify the trade‑offs between linear simplicity and nonlinear estimation accuracy. Finally, hardware‑in‑the‑loop experiments and the development of adaptive algorithms that automatically adjust the outer observer’s bandwidth based on real‑time measurements of disturbance dynamics are identified as promising avenues for subsequent work.
In summary, the authors present a theoretically sound and practically viable enhancement to ADRC by introducing a nested LESO structure. The approach successfully mitigates the bandwidth‑noise trade‑off that limits conventional LESO designs, delivering substantial improvements in tracking accuracy and disturbance rejection without imposing additional hardware burdens. This contribution is poised to influence future control system designs, especially in resource‑constrained applications such as low‑cost robotics, motor drives, and aerospace attitude control.
Comments & Academic Discussion
Loading comments...
Leave a Comment