Controlling a population
We introduce a new setting where a population of agents, each modelled by a finite-state system, are controlled uniformly: the controller applies the same action to every agent. The framework is largely inspired by the control of a biological system,…
Authors: Nathalie Bertr, Miheer Dewaskar, Blaise Genest
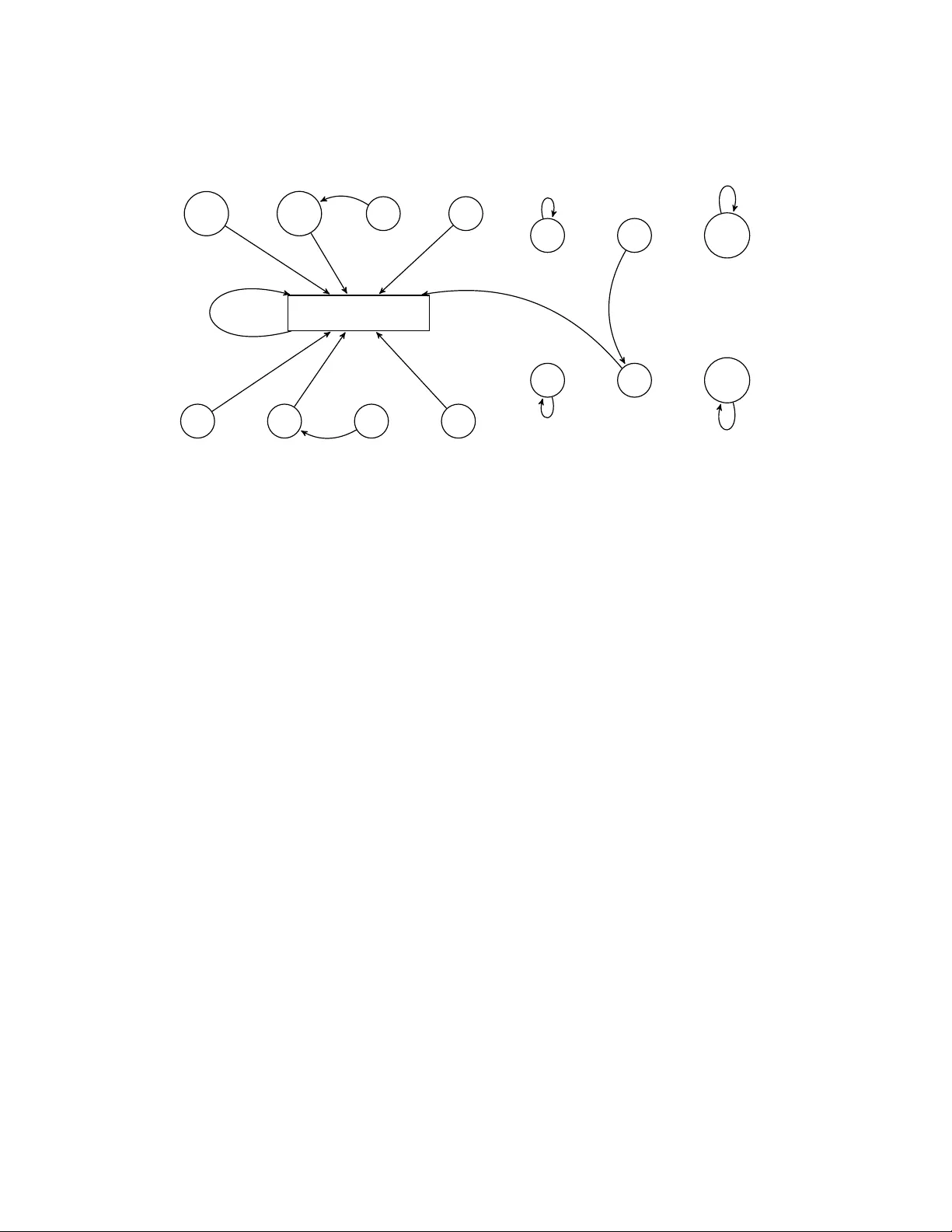
Logical Methods in Computer Science V olume 15, Issue 3, 2019, pp . 6:1–6:30 https://lmcs.episciences.org/ Submitted Jul. 04, 2018 Published Jul. 29, 2019 CONTR OLLING A POPULA TION NA THALIE BER TRAND, MIHEER DEW ASKAR, BLAISE GENEST, HUGO GIMBER T, AND ADW AIT AMIT GODBOLE Univ Rennes, Inria & IRISA, F rance e-mail addr ess : nathalie.b ertrand@inria.fr Univ ersity of North Carolina at Chapel Hill, USA e-mail addr ess : miheer@liv e.unc.edu Univ Rennes, CNRS, IRISA, F rance e-mail addr ess : blaise.genest@irisa.fr CNRS & LaBRI, F rance e-mail addr ess : h ugo.gimbert@labri.fr I IT Bomba y , India e-mail addr ess : go db ole15@gmail.com Abstract. W e introduce a new setting where a population of agen ts, each mo delled by a finite-state system, are controlled uniformly: the controller applies the same action to every agen t. The framework is largely inspired by the control of a biological system, namely a population of yeasts, where the controller may only change the en vironmen t common to all cells. W e study a synchronisation problem for such p opulations: no matter how individual agents react to the actions of the con troller, the controller aims at driving all agents synchronously to a target state. The agents are naturally represented by a non-deterministic finite state automaton (NF A), the same for every agent, and the whole system is enco ded as a 2-play er game. The first pla y er (Controller) chooses actions, and the second play er (Agents) resolves non-determinism for each agent. The game with m agen ts is called the m -p opulation game. This giv es rise to a parameterized con trol problem (where con trol refers to 2 play er games), namely the population c ontr ol pr oblem : can Con troller con trol the m -p opulation game for all m ∈ N whatever Agents do es? In this paper, we pro ve that the p opulation control problem is decidable, and it is a EXPTIME -complete problem. As far as we kno w, this is one of the first results on the con trol of parameterized systems. Our algorithm, which is not based on cut-off tec hniques, pro duces winning strategies which are sym b olic, that is, they do not need to count precisely ho w the p opulation is spread b etw een states. The winning strategies pro duced by our algorithm are optimal with resp ect to the synchronisation time: the maximal n um b er of steps b efore sync hronisation of all agents in the target state is at most polynomial in the n umber of agen ts m , and exponential in the size of the NF A. W e also show that if there is no winning strategy , then there is a population size M suc h that Con troller wins the m -p opulation game if and only if m ≤ M . Surprisingly , M can b e doubly exp onential in the num ber of states of the NF A, with tight upp er and low er b ounds. Key wor ds and phrases: Logic and v erification, control, parametric systems. LOGICAL METHODS l IN COMPUTER SCIENCE DOI:10.23638/LMCS-15(3:6)2019 c N. Bertrand, M. Dewaskar, B. Genest, H. Gimbert, and A.A. Godbole CC Creative Commons 6:2 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 1. Introduction Finite-state controllers, implemen ted b y soft ware, find applications in man y differen t domains: telecomm unication, aeronautics, etc. Man y theoretical studies from the mo del-chec king comm unit y show ed that, in idealised settings, finite-state controllers suffice. Games are an elegant formalism to mo del control problems [ 5 ]: pla y ers represent the controller and the system; the precise setting (num b er of play ers, their abilities, and their observ ations) dep ends on the context. Recen tly , finite-state controllers ha v e b een used to control living organisms, suc h as a p opulation of yeasts [ 23 ]. In this application, microscopy is used to monitor the fluorescence lev el of a p opulation of yeasts, reflecting the concentration of some molecule, which differs from cell to cell. Finite-state systems can mo del a discretisation of the p opulation of y easts [ 23 , 3 ]. The frequency and duration of injections of a sorbitol solution can be con trolled, b eing injected uniformly in to a solution in which the yeast p opulation is immersed. How ever, the resp onse of each cell to the osmotic stress induced by sorbitol v aries, influencing the concen tration of the fluorescent molecule. The ob jective is to con trol the p opulation to drive it through a sequence of predetermined fluorescence states. T aking inspiration from this biological control problem, w e prop ose in this pap er, an ide alise d problem for the p opulation of y easts: the (p erfectly-informed) controller aims at leading sync hronously all agen ts to a given fluorescence state. W e introduce the m -p opulation game , where a p opulation of m iden tical agen ts is controlled uniformly . Each agen t is mo deled as a nondeterministic finite-state automaton (NF A), the same for eac h agent. The first pla y er, called Controller, applies the same action, a letter from the NF A alphab et, to every agen t. Its opp onent, called Agen ts, chooses the reaction of each individual agent, that is their successor state up on that action. These reactions can differ due to non-determinism. The ob jectiv e for Controller is to gather all agents synchronously in the target state, and Agen ts seeks the opp osite ob jective. Our idealised setting ma y not b e entirely satisfactory , y et it constitutes a first ste p to w ards more realistic formalisations of the yeast p opulation con trol problem. Dealing with large p opulations explicitly is in general intractable due to the state-space explosion problem. W e therefore consider the asso ciated symb olic p ar ameterize d c ontr ol pr oblem , that requires to synchronise all agents, indep endently of the p opulation size. In terestingly , this p opulation con trol problem do es not fit traditional game frameworks from the mo del-c hec king communit y . While p ar ameterize d verific ation received recen tly quite some attention (see the related w ork b elo w), to the b est of our knowledge, our framew ork is among the first ones in p ar ameterize d c ontr ol . Our results. W e first show that considering an infinite p opulation is not equiv alent to the parameterized control problem: there are simple cases where Controller cannot con trol an infinite p opulation but can con trol every finite p opulation. Solving the ∞ -p opulation game reduces to chec king a reachabilit y prop ert y on the supp ort graph [ 21 ], which can b e easily done in PSP ACE . On the other hand, solving the parameterized control problem requires new pro of tec hniques, data structures and algorithms. W e easily obtain that when the answer to the p opulation control problem is negative, there exists a p opulation size M , called the cut-off , suc h that Controller wins the m - p opulation game if and only if m ≤ M . Surprisingly , w e obtain a lo w er-b ound on the cut-off doubly exp onential in the num b er of states of the NF A. Exploiting this c ut-off naively w ould th us yield an inefficien t algorithm of least doubly exp onential time complexit y . V ol. 15:3 CONTROLLING A POPULA TION 6:3 F ortunately , dev eloping new proof tec hniques ( not based on cut-off ), w e manage to obtain a b etter complexity: we prov e the p opulation control problem to b e EXPTIME -complete. As a b ypro duct, we obtain a doubly exp onential upp er-b ound for the cut-off, matching the lo w er-b ound. Our tec hniques are based on a reduction to a parit y game with exp onentially man y states and a p olynomial num b er of priorities. The constructed parity game, and asso ciated winning strategies, giv es insight on the winning strategies of Controller in the m -p opulation games, for all v alues of m . Controller selects actions base d on a p olynomial n um b er of tr ansfer gr aphs , describing the tra jectory of agen ts b efore reaching a given state. If Controller wins this parity game then he can uniformly apply his winning strategy to all m -p opulation games, just keeping track of these transfer graphs, indep enden tly of the exact coun t in eac h state. If Agen ts wins the parity game then he also has a uniform winning strategy in m -p opulation games, for m large enough, which consists in splitting the agents ev enly among all transitions of the transfer graphs. Last, we obtain that when the answer to the p opulation control problem is p ositive, the con troller built by our algorithm takes at most a p olynomial n um b er of steps to synchronize all agen ts in the winning state, where the p olynomial is of order the num b er of agents p ow er the num b er of states of the NF A. W e show that our algorithm is optimal, as there are systems which require at least this order of steps to sync hronize all agents. Related work. P arameterized verification of systems with many identical comp onents started with the seminal w ork of German and Sistla in the early nineties [ 16 ], and receiv ed recen tly quite some atten tion. The dec idabilit y and complexity of these problems typically dep end on the communication means, and on whether the system contains a leader (follo wing a different template) as exp osed in the recen t survey [ 13 ]. This framework has b een extended to timed automata templates [ 2 , 1 ] and probabilistic s ystems with Marko v decision pro cesses templates [ 6 , 7 ]. Another line of w ork considers population proto cols [ 4 , 15 , 8 ]. Close in spirit, are broadcast proto cols [ 14 ], in which one action may mov e an arbitrary num ber of agents from one state to another. Our mo del can b e mo deled as a sub class of broadcast proto cols, where broadcasts emissions are self lo ops at a unique state, and no other synchronisation allo w ed. The parameterized reachabilit y question considered for broadcast proto cols is trivial in our framework, while our parameterized control question w ould b e undecidable for broadcast proto cols. In these differen t w orks, comp onen ts in teract directly , while in our work, the interaction is indirect via the common action of the controller. F urther, the problems considered in related work are verification questions, and do not tackle the difficult issue we address of synthesizing a con troller for all instances of a parameterized system. There are very few contributions p ertaining to parameterized games with more than one pla y er. The most related is [ 20 ], which prov es decidabilit y of control of mutual exclusion-lik e proto cols in the presence of an unbounded n um b er of agen ts. Another con tribution in that domain is the one of broadcast netw orks of iden tical parity games [ 7 ]. How ever, the game is used to solve a verification (reachabilit y) question rather than a parameterized control problem as in our case. Also the roles of the tw o play ers are quite differen t. The winning condition we are considering is close to synchr onising wor ds . The original sync hronising w ord problem asks for the existence of a w ord w and a state q of a deterministic finite state automaton, such that no matter the initial state s , reading w from s w ould lead to state q (see [ 24 ] for a survey). Lately , synchronising words hav e b een extended to NF As [ 21 ]. Compared to our settings, the author assumes a possibly infinite p opulation of agents. The setting is th us not parameterized, and a usual supp ort arena suffices to 6:4 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 obtain a PSP ACE algorithm. Synchronisation for probabilistic mo dels [ 11 , 12 ] hav e also b een considered: the p opulation of agen ts is not finite nor discrete, but rather contin uous, represen ted as a distribution. The distribution evolv es deterministically with the choice of the controller (the probabilit y mass is split according to the probabilities of the transitions), while in our setting, each agen t mov es nondeterministically . In [ 11 ], the controller needs to apply the same action whatever the state the agents are in (similarly to our setting), and then the existence of a controller is undecidable. In [ 12 ], the controller can choose the action dep ending on the state eac h agen t is in (unlik e our setting), and the existence of a controller reac hing uniformly a set of states is PSP ACE -complete. Last, our parameterized control problem can b e enco ded as a 2-play er game on V ASS [ 9 ], with one counter p er state of the NF A: the opp onen t gets to choose the p opulation size (a counter v alue), and the mo v e of each agent corresp onds to dec remen ting a counter and incremen ting another. Suc h a reduction yields a symmetrical game on V ASS in which b oth pla y ers are allo w ed to mo dify the counter v alues, in order to chec k that the other pla y er did not cheat. Symmetrical games on V ASS are undecidable [ 9 ], and their asymmetric v ariant (only one play er is allow ed to c hange the counter v alues) are decidable in 2 EXPTIME [ 19 ], th us with higher complexit y than our sp ecific parameterized control problem. An extended abstract of this work app eared in the pro ceedings of the conference CONCUR 2017. In comparison, we provide here full pro ofs of our results, and added more in tuitions and examples to b etter explain the v arious concepts in tro duced in this pap er. Regarding contributions, we augmented our results with the study of the maximal time to sync hronisation, for which we show that the controller built b y our algorithm is optimal. Outline. In Section 2 w e define the p opulation control problem and announce our main results. Section 3 introduces the capacity game, and shows its equiv alence with the p opulation control problem problem. Section 4 details the resolution of the capacit y game in EXPTIME , relying on a clever enco ding into a parity game. It also prov es a doubly exp onen tial b ound on the cut-off. Section 5 studies the maximal time to synchronisation. Section 6 pro vides matching lo w er b ounds on the complexity and on the cut-off. The pap er ends with a discussion in Section 7. 2. The popula tion control problem 2.1. The m -p opulation game. A nondeterministic finite automaton (NF A for short) is a tuple A = ( Q, Σ , q 0 , ∆) with Q a finite set of states, Σ a finite alphab et, q 0 ∈ Q an initial state, and ∆ ⊆ Q × Σ × Q the transition relation. W e assume throughout the pap er that NF As are complete, that is, ∀ q ∈ Q, a ∈ Σ , ∃ p ∈ Q : ( q , a, p ) ∈ ∆. In the follo wing, incomplete NF As, esp ecially in figures, hav e to b e understo o d as completed with a sink state. F or every integer m , we consider a system A m with m iden tical agen ts A 1 , . . . , A m of the NF A A . The system A m is itself an NF A ( Q m , Σ , q m 0 , ∆ m ) defined as follows. F ormally , states of A m are called configurations, and they are tuples q = ( q 1 , . . . , q m ) ∈ Q m describing the curren t state of eac h agen t in the p opulation. W e use the shorthand q 0 [ m ], or simply q 0 when m is clear from context, to denote the initial configuration ( q 0 , . . . , q 0 ) of A m . Given a target state f ∈ Q , the f -sync hronizing configuration is f m = ( f , . . . , f ) in which each agent is in the target state. V ol. 15:3 CONTROLLING A POPULA TION 6:5 q 0 q 1 q 2 f δ δ δ δ b a b a a, b a, b, δ Figure 1: An example of NF A: The splitting gadget A split . The intuitiv e semantics of A m is that at eac h step, the same action from Σ applies to all agents. The effect of the action how ever may not b e uniform given the nondeterminism presen t in A : we ha v e (( q 1 , . . . , q m ) , a, ( q 0 1 , . . . , q 0 m )) ∈ ∆ m iff ( q j , a, q 0 j ) ∈ ∆ for all j ≤ m . A (finite or infinite) play in A m is an alternating sequence of configurations and actions, starting in the initial configuration: π = q 0 a 0 q 1 a 1 · · · suc h that ( q i , a i , q i +1 ) ∈ ∆ m for all i . This is the m -p opulation game b et w een Con troller and Agents, where Con troller chooses the actions and Agen ts chooses how to resolve non-determinism. The ob jective for Controller is to gather all agents synchronously in f while Agents seeks the opp osite ob jectiv e. Our parameterized control problem asks whether Controller can win the m -p opulation game for ev ery m ∈ N . A strategy of Con troller in the m -p opulation game is a function mapping finite plays to actions, σ : ( Q m × Σ) ∗ × Q m → Σ. A pla y π = q 0 a 0 q 1 a 1 q 2 · · · is said to r esp e ct σ , or is a play under σ , if it satisfies a i = σ ( q 0 a 0 q 1 · · · q i ) for all i ∈ N . A pla y π = q 0 a 0 q 1 a 1 q 2 · · · is winning if it hits the f -sync hronizing configuration, that is q j = f m for some j ∈ N . Con troller wins the m -p opulation game if he has a strategy suc h that all pla ys under this strategy are winning. One can assume without loss of ge neralit y that f is a sink state. If not, it suffices to add a new action leading tokens from f to the new target sink state , and tokens from other states to a losing sink state / . The goal of this pap er is to study the following parameterized control problem: P opulation control problem Input : An NF A A = ( Q, q 0 , Σ , ∆) and a target state f ∈ Q . Output : Y es iff for every integer m Controller wins the m -p opulation game. F or a fixed m , the winner of the m -p opulation game can b e determined by solving the underlying reachabilit y game with | Q | m states, which is intractable for large v alues of m . On the other hand, the answer to the p opulation control problem gives the winner of the m -p opulation game for arbitrary large v alues of m . T o obtain a decision pro cedure for this parameterized problem, new data structures and algorithmic to ols need to b e dev elop ed, m uc h more elab orate than the standard algorithm solving reachabilit y games. Example 2.1. W e illustrate the population control problem with the example A split on action alphab et Σ = { a, b, δ } in Figure 1. Here, to represent a configuration q , we use a counting abstraction, and iden tify q with the vector ( n 0 , n 1 , n 2 , n 3 ), where n 0 is the num b er of agents in state q 0 , etc, and n 3 is the num b er of agents in f . Con troller has a wa y to gather all agen ts sync hronously to f . W e can give a symbolic representation of a memoryless winning strategy 6:6 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 σ : ∀ k 0 , k 1 > 0 , ∀ k 2 , k 3 ≥ 0 , σ ( k 0 , 0 , 0 , k 3 ) = δ, σ (0 , k 1 , k 2 , k 3 ) = a, σ (0 , 0 , k 2 , k 3 ) = b . Under this strategy indeed, the num b er of agen ts outside f decreases b y at least one at every other step. The prop erties of this example will b e detailed later and pla y a part in proving a low er b ound (see Prop osition 6.3). Example 2.2. W e provide another illustrating example, requiring a more inv olved strategy . Consider the NF A from Figure 2, with Σ = { try , retry , top , bot , keep , restart } . This NF A is again a p ositive instance of the p opulation control problem. Y et, in contrast with the previous example, there are unsafe mov es for Controller. Indeed, after playing try from q 0 , pla ying bot is losing if there are agents in q > , and playing top is losing if there are agents in q ⊥ (recall that unsp ecified transitions lead to a sink losing state). How ev er, alternating try and keep un til either q ⊥ b ecomes empty - allo wing to play top or q > is empty - allowing to pla y bot , and then restart , yields a configuration with less agents in q 0 , and at least one in f . Contin uing in the same wa y pro vides a winning strategy for Controller. This example will b e used again in Section 5, regarding the worst-case time to sync hronisation. q 0 q > q ⊥ k f try try keep top keep bot restart Σ \ { restart } Σ Figure 2: A second example of NF A for the p opulation con trol problem: A time . 2.2. P arameterized con trol and cut-off. A first observ ation for the p opulation control problem is that q 0 [ m ], f m and Q m are stable under a p ermutation of co ordinates. A consequence is that the m -p opulation game is also symmetric under p ermutation, and thus the set of winning configurations is symmetric and the winning strategy can b e chosen uniformly from symmetric winning configurations. Therefore, if Con troller wins the m - p opulation game then he has a p ositional winning strategy which only counts the n um ber of agen ts in each s tate of A (the counting abstraction used in Example 2.1). Prop osition 2.3. L et m ∈ N . If Contr ol ler wins the m -p opulation game, then he wins the m 0 -p opulation game for every m 0 ≤ m . Pr o of. Let m ∈ N , and assume σ is a winning strategy for Controller in A m . F or m 0 ≤ m w e define σ 0 as a strategy on A m 0 , inductively on the length of finite pla ys. Initially , σ 0 c ho oses the same first action as σ : σ 0 ( q m 0 0 ) = σ ( q m 0 ). W e then arbitrarily choose that the missing m − m 0 agen ts w ould b ehav e similarly as the first agen t. This is indeed a possible mov e for the adv ersary in A m . Then, for any finite play under σ 0 in A m 0 , say π 0 = q m 0 0 a 0 q m 0 1 a 1 q m 0 2 · · · q m 0 n , there m ust exist an extension π of π 0 obtained b y adding m − m 0 agen ts, all b ehaving as the first agent in A m 0 , that is consisten t with σ . Then, we let σ 0 ( π 0 ) = σ ( π ). Obviously , since σ is winning in A m , σ 0 is also winning in A m 0 . V ol. 15:3 CONTROLLING A POPULA TION 6:7 Hence, when the answer to the p opulation control problem is negative, there exists a cut-off , that is a v alue M ∈ N suc h that for every m < M , Con troller has a winning strategy in A m , and for every m ≥ M , he has no winning strategy . Example 2.4. T o illustrate the notion of cut-off, consider the NF A on alphab et Σ = A ∪ { b } from Figure 3. Here again, unsp ecified transitions lead to a sink losing state / . Let us prov e that the cut-off is M = | Q | − 2 in this case. On the one hand, for m < M , there is a winning strategy σ m in A m to reach f m , in just tw o steps. It first plays b , and b ecause m < M , in the next configuration, there is at least one state q i suc h that no agent is in q i . It then suffices to play a i to win. On the other hand, if m ≥ M , there is no winning strategy to sync hronize in f , since after the first b , agents can b e spread so that there is at least one agen t in each state q i . F rom there, Controller can either pla y action b and restart the whole game, or play any action a i , leading at least one agen t to the sink state / . q 0 q 1 . . . q M f b b b A \ a 1 A \ a M b A ∪ { b } Figure 3: An NF A with a linear cut-off. 2.3. Main results. W e are no w in a p osition to state the contributions of this pap er. Most imp ortan tly , we establish the decidability and complexity of the p opulation control problem, with matching upp er and low er b ounds on complexity: Theorem 2.5. The p opulation c ontr ol pr oblem is EXPTIME -c omplete. T o prov e Theorem 2.5, w e pro ceed as follows. First, Theorem 3.7 states the equiv alence of the p opulation control problem with an in v olv ed but non-parametric con trol problem, called the capacity game. A simple yet sub optimal 2 EXPTIME upp er b ound derives from this equiv alence. In Theorem 4.5, we reduce the capacit y game to an exp onential-size parit y game with p olynomially man y parities, yielding an EXPTIME upp er b ound. The matching EXPTIME -hard low er b ound is prov ed in Theorem 6.1. F or p ositive instances of the p opulation con trol problem, our decision algorithm computes a symbolic strategy σ , applicable to all instances A m , which, in particular, do es not rely on the num b er of agents in each state. This sym b olic strategy requires exp onential memory . F urther, it is optimal with resp ect to the sync hronisation time, i.e. the maximal n um ber of steps b efore sync hronisation, which is p olynomial in the num b er of agents. Theorem 2.6. The synchr onisation time under the winning str ate gy σ is p olynomial in the numb er of agents (and exp onential in the size of A ). Ther e is a family of NF A ( A n ) with n states, such that m n − 2 2 steps ar e ne e de d by any str ate gy to synchr onise m agents. The upp er b ound is stated in Theorem 5.4, and the low er b ound in Corollary 5.3. F or negative instances to the p opulation control problem, the cut-off is at most doubly exp onen tial, which is asymptotically tight. 6:8 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 Theorem 2.7. In c ase the answer to the p opulation c ontr ol pr oblem is ne gative, the cut-off is at most ≤ 2 2 O ( | Q | 4 ) . Ther e is a family of NF A ( A n ) of size O ( n ) and whose cut-off is 2 2 n . Concerning the cut-off, the upp er b ound derives from results of Theorem 4.5 (ab out the size of Agen ts’ winning strategy) combined with Prop osition 3.10. The low er b ound is stated in Prop osition 6.3 3. The cap acity game The ob jective of this section is to show that the p opulation control problem is equiv alent to solving a game called the c ap acity game . T o introduce useful notations, we first recall the p opulation game with infinitely many agen ts, as studied in [21] (see also [22] p.81). 3.1. The ∞ -p opulation game. T o study the ∞ -p opulation game, the b eha viour of infin- itely many agents is abstracted into supp orts which keep trac k of the set of states in which at least one agent is. W e thus introduce the supp ort game , whic h relies on the notion of tr ansfer gr aphs . F ormally , a transfer graph is a subset of Q × Q describing how agen ts are mov ed during one step. The domain of a transfer graph G is Dom ( G ) = { q ∈ Q | ∃ ( q , r ) ∈ G } and its image is Im ( G ) = { r ∈ Q | ∃ ( q , r ) ∈ G } . Given an NF A A = ( Q, Σ , q 0 , ∆) and a ∈ Σ, the transfer graph G is compatible with a if for ev ery edge ( q , r ) of G , ( q , a, r ) ∈ ∆. W e write G for the set of transfer graphs. The supp ort game of an NF A A is a tw o-pla yer reac habilit y game play ed b y Controller and Agents on the supp ort ar ena as follows. States are supp orts, i.e. , non-empty subsets of Q and the play starts in { q 0 } . The goal supp ort is { f } . F rom a supp ort S , first Controller c ho oses a letter a ∈ Σ, then Agen ts chooses a transfer graph G compatible with a and such that Dom ( G ) = S , and the next supp ort is Im ( G ). A play in the supp ort arena is describ ed b y the sequence ρ = S 0 a 1 ,G 1 − → S 1 a 2 ,G 2 − → . . . of supp orts and actions (letters and transfer graphs) of the play ers. Here, Agen ts’ b est strategy is to play the maximal graph p ossible, and w e obtain a PSP ACE algorithm [21], and problem is PSP ACE -complete: Prop osition 3.1. Contr ol ler wins the ∞ -p opulation game iff he wins the supp ort game. Pr o of. Let π = q 0 a 1 q 1 . . . q n − 1 a n q n . . . b e an infinite (or a finite) pla y of the ∞ -p opulation game: agent i ∈ N is in state q k [ i ] at step k . By only observing the supp ort of the states and the transfer graphs, we can pro ject this play onto the supp ort arena. More precisely , denoting S k = { q k [ i ] | i ∈ N } and G k +1 = { ( q k [ i ] , q k +1 [ i ]) | i ∈ N } for ev ery k , we hav e Φ( π ) = S 0 a 1 ,G 1 − → S 1 · · · S n − 1 a n ,G n − → S n · · · is a v alid play in the supp ort ar ena . Hence if Con troller can win the supp ort game with strategy σ , then Con troller can use the strategy σ ◦ Φ in the ∞ -p opulation game. This is a winning strategy since the pro jection in the supp ort arena should even tually reac h { f } . On the other hand if Controller do esn’t hav e a winning strategy in the supp ort game, then by determinacy of reachabilit y games, Agents has a strategy in the supp ort game to a v oid reaching { f } . This strategy can b e extended to a strategy in the ∞ -p opulation game b y sending infinitely many agents along each edge of the c hosen transfer graph. This can alw a ys b e done b ecause, inductively , there are infinitely many agents in each state. V ol. 15:3 CONTROLLING A POPULA TION 6:9 P erhaps surprisingly , when it comes to finite p opulations, the supp ort game cannot b e exploited to solve the p opulation control problem. Indeed, Controller might win ev ery m -p opulation game (with m < ∞ ) and at the same time lose the ∞ -p opulation game. The example from Figure 1 witnesses this situation. As already shown, Controller wins any m -p opulation game with m < ∞ . Ho w ev er, Agents can win the ∞ -p opulation game by splitting agents from q 0 to b oth q 1 and q 2 eac h time Controller plays δ . This w a y , the sequence of supp orts is { q 0 }{ q 1 , q 2 } ( { q 0 , f }{ q 1 , q 2 , f } ) ∗ , which never hits { f } . 3.2. Realisable pla ys. Pla ys of the m -p opulation game (for m < ∞ ) can b e abstracted as pla ys in the supp ort game, forgetting the identit y of agents and keeping only track of edges that are used by at least one agent. F ormally , given a play π = q 0 a 0 q 1 a 1 q 2 · · · of the m -p opulation game, define for every in teger n , S n = { q n [ i ] | 1 ≤ i ≤ m } and G n +1 = { ( q n [ i ] , q n +1 [ i ]) | 1 ≤ i ≤ m } . W e denote Φ m ( π ) the pla y S 0 a 1 ,G 1 − → S 1 a 2 ,G 2 − → . . . in the supp ort arena, called the pro jection of π . Not every play in the supp ort arena can b e obtained by pro jection. This is the reason for introducing the notion of realisable plays: Definition 3.2 (Realisable plays) . A play of the supp ort game is r e alisable if there exists m < ∞ suc h that it is the pro jection by Φ m of a play in the m -p opulation game. T o characterise realisability , we introduce en tries of accumulators: Definition 3.3. Let ρ = S 0 a 1 ,G 1 − → S 1 a 2 ,G 2 − → . . . b e a pla y in the supp ort arena. An ac cumulator of ρ is a sequence T = ( T j ) j ∈ N suc h that for every in teger j , T j ⊆ S j , and which is suc c essor- close d i.e. , for ev ery j ∈ N , ( s ∈ T j ∧ ( s, t ) ∈ G j +1 ) = ⇒ t ∈ T j +1 . F or every j ∈ N , an edge ( s, t ) ∈ G j +1 is an entry to T if s 6∈ T j and t ∈ T j +1 ; such an index j is called an entry time . q 0 q 1 a a a a • q 0 • q 1 • q 0 • q 1 G • q 0 • q 1 • q 0 • q 1 H 0 1 G • • • • 2 • • H 3 4 • • • • G G • • H · · · Figure 4: An NF A, tw o transfer graphs, and a pla y with finite y et unbounded capacity . Figure 4 illustrates the notions we just introduced: it con tains an NF A (left), tw o transfer graphs G and H (middle), and ρ = GH G 2 H G 3 · · · a pla y in the supp ort arena (righ t). The grey zone is an accumulator defined by T 0 = T 1 = ∅ , T 2 = T 3 = T 4 = { q 1 } and T n = { q 0 , q 1 } for all n ≥ 5. Definition 3.4 (Pla ys with finite and b ounded capacity) . A play has finite c ap acity if all its accumulators ha v e finitely many entries (or en try times), infinite c ap acity otherwise, and b ounde d c ap acity if the num ber of entries (or entry times) of its accumulators is b ounded. 6:10 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 Con tin uing with the example of Figure 4, en tries of the accumulator are depicted in red. The play ρ = GH G 2 H G 3 · · · is not realisable in any m -p opulation game, since at least n agen ts are needed to realise n transfer graphs G in a row: at eac h G step, at least one agen t mo v es from q 0 to q 1 , and no new agent enters q 0 . Moreov er, let us argue that ρ has un b ounded capacity . A simple analysis sho ws that there are only tw o kinds of non-trivial accum ulators ( T j ) j ∈ N dep ending on whether their first non-empty T j is { q 0 } or { q 1 } . W e call these top and b ottom accumulators, resp ectively . All accumulators hav e finitely many en tries, thus the play has finite capacity . How ever, for every n ∈ N there is a bottom accum ulator with 2 n en tries. Therefore, ρ has unbounded capacity , and it is not realisable. W e show that in general, realisabilit y is equiv alen t to b ounde d capacity: Lemma 3.5. A play is r e alisable iff it has b ounde d c ap acity. Pr o of. Let ρ = S 0 a 1 ,G 1 − → S 1 a 2 ,G 2 − → · · · b e a realisable pla y in the support arena and π = q 0 a 1 q 1 a 2 q 2 · · · a pla y in the m -p opulation game for some m , suc h that Φ m ( π ) = ρ . F or any accum ulator T = ( T j ) j ∈ N of ρ , let us show that T has less than m en tries. F or every j ∈ N , w e define n j = | { 1 ≤ k ≤ m | q j ( k ) ∈ T j } | as the num b er of agents in the accumulator at index j . By definition of the pro jection, ev ery edge ( s, t ) in G j corresp onds to the mov e of at least one agen t from state s in q j to state t in q j +1 . Thus, since the accum ulator is successor-closed, the sequence ( n j ) j ∈ N is non-decreasing and it increases at each entry time. The num b er of entry times is thus b ounded b y m the num b er of agents. Con v ersely , assume that a play ρ = S 0 a 1 ,G 1 − → S 1 a 2 ,G 2 − → · · · has b ounded capacity , and let m b e an upp er b ound on the num ber of entry times of its accumulators. Let us show that ρ is the pro jection of a play π = q 0 a 1 q 1 a 2 q 2 · · · in the ( | S 0 || Q | m +1 )-p opulation game. In the initial configuration q 0 , every state in S 0 con tains | Q | m +1 agen ts. Then, configuration q n +1 is obtained from q n b y spreading the agents evenly among all edges of G n +1 . As a consequence, for every edge ( s, t ) ∈ G n +1 at least a fraction 1 | Q | of the agents in state s in q n mo v es to state t in q n +1 . By induction, π = q 0 a 1 q 1 a 2 q 2 · · · pro jects to some play ρ 0 = S 0 0 a 1 ,G 0 1 − → S 0 1 a 2 ,G 0 2 − → · · · suc h that for every n ∈ N , S 0 n ⊆ S n and G 0 n ⊆ G n . T o prov e that ρ 0 = ρ , we show that for every n ∈ N and state t ∈ S n , at least | Q | agen ts are in state t in q n . F or that let ( U j ) j ∈{ 0 ...n } b e the sequence of subsets of Q defined by U n = { t } , and for 0 < j < n , U j − 1 = { s ∈ Q | ∃ t 0 ∈ U j , ( s, t 0 ) ∈ G j } . In particular, U 0 = S 0 . Let ( T j ) j ∈ N b e the sequence of subsets of states defined b y T j = S j \ U j if j ≤ n and T j = S j otherwise. Then ( T j ) j ∈ N is an accum ulator: if s 6∈ U j and ( s, s 0 ) ∈ G j then s 0 6∈ U j +1 . As a consequence, ( T j ) j ∈ N has at most m en try times, th us, there are at most m indices j ∈ { 0 . . . n − 1 } suc h that some agen ts in the states of S j \ T j = U j in configuration q j ma y mov e to states of T j +1 in configuration q j +1 . In other w ords, if w e denote M j the num b er of agen ts in the states of U j in configuration q j then there are at most m indices where the sequence ( M j ) j ∈{ 0 ...n } decreases. By definition of π , ev en when M j > M j +1 , at least a fraction 1 | Q | of the agents mov es from U j to U j +1 along the edges of G j +1 , thus M j +1 ≥ M j | Q | . Finally , the n um b er of agen ts M n in state t in q n satisfies M n ≥ | S 0 || Q | m +1 | Q | m ≥ | Q | . Hence ρ and ρ 0 coincide, so that ρ is realisable. V ol. 15:3 CONTROLLING A POPULA TION 6:11 3.3. The capacit y game. An idea to obtain a game on the supp ort arena equiv alen t with the p opulation control problem is to make Agen ts lose whenever the play is not realisable, i.e. whenev er the play has unbounded capacit y . One issue with (un)b ounded capacity is ho w ev er that it is not a regular prop erty for runs. Hence, it is not easy to use it as a winning condition. On the contrary , finite capacity is a regular prop erty . W e thus relax (un)b ounded capacity by using (in)finite capacit y and define the corresp onding abstraction of the p opulation game: Definition 3.6 (Capacit y game) . The c ap acity game is the game play ed on the supp ort arena, where Controller wins a pla y iff either the play reaches { f } or the play has infinite capacit y . A pla y er wins the c ap acity game if he has a winning strategy in this game. W e show that this relaxation can b e used to decide the p opulation con trol problem. Theorem 3.7. The answer to the p opulation c ontr ol pr oblem is p ositive iff Contr ol ler wins the c ap acity game. This theorem is a direct corollary of the following prop ositions (3.8 - 3.10): Prop osition 3.8. Either Contr ol ler or A gents wins the c ap acity game, and the winner has a winning str ate gy with finite memory . Pr o of. Whether a play has infinite capacity can b e v erified by a non-deterministic B ¨ uc hi automaton of size 2 | Q | on the alphab et of transfer graphs, which guesses an accumulator on the fly and c hec ks that it has infinitely man y en tries. This B ¨ uc hi automaton can b e determinised into a parity automaton ( e.g. using Safra’s construction) with state space M of size O 2 2 | Q | . The synchronized pro duct of this deterministic parity automaton with the supp ort game pro duces a parit y game which is equiv alent with the capacity game, in the sense that, up to unam biguous synchronization with the deterministic automaton, plays and strategies in b oth games are the same and the sync hronization preserves winning plays and strategies. Since parity games are determined and p ositional [ 25 ], either Con troller or Agents has a p ositional winning strategy in the parity game, th us either Controller or Agen ts has a winning strategy with finite memory M in the capacity game. Prop osition 3.9. If Contr ol ler wins the c ap acity game, then Contr ol ler has a winning str ate gy in the m -p opulation game for al l m . Pr o of. Assuming that Controller wins the capacity game with a strategy σ , he can win an y m -p opulation game, m < ∞ , with the strategy σ m = σ ◦ Φ m . The pro jection Φ m ( π ) of ev ery infinite play π resp ecting σ m is realisable, thus Φ m ( π ) has b ounded, hence finite, capacit y (Lemma 3.5). Moreov er Φ m ( π ) resp ects σ , and since σ wins the capacity game, Φ m ( π ) reaches { f } . Thus π reaches f m and σ m is winning. W e now pro v e the more challenging reverse implication. Recall by Prop osition 3.8 that if Agen ts has a winning strategy in the capacity game, then he has a finite-memory strategy . Prop osition 3.10. If A gents has a winning str ate gy in the c ap acity game using finite memory M , then he has a winning str ate gy in the | Q | 1+ | M |· 4 | Q | -p opulation game. Pr o of. Let τ b e a winning strategy for Agen ts in the capacit y game with finite-memory M . First w e sho w that any play π = S 0 a 1 ,G 1 − → S 1 a 2 ,G 2 − → . . . compatible with τ should ha v e capacit y ( i.e. count of en try times of any of its accumulator) b ounded by B = | M | × 4 | Q | . 6:12 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 Let { T i } i ∈ N b e any accum ulator of π . If there are t w o integers 0 ≤ i < j ≤ n suc h that at times i and j : • the memory state of τ coincide: m i = m j ; • the supp orts coincide: S i = S j ; and • the supp orts in the accumulator T coincide: T i = T j . then we show that there is no en try in the accum ulator b etw een indices i and j . The play π ∗ iden tical to π up to date i and whic h rep eats ad infinitum the subplay of π b et w een times i and j , is consistent with τ , b ecause m i = m j and S i = S j . The corresp onding sequence of transfer graphs is G 0 , . . . , G i − 1 ( G i , . . . , G j − 1 ) ω , and T 0 , . . . , T i − 1 ( T i . . . T j − 1 ) ω is a “p erio dic” accumulator of π ∗ . By p erio dicity , this accumulator has either no entry or infinitely many entries after date i − 1. Since τ is winning, π ∗ has finite capacity , th us the p erio dic accum ulator has no entry after date i − 1, and hence there are no entries in the accum ulator ( T j ) j ∈ N b et w een indices i and j . Let I b e the set of entry times for the accumulator ( T j ) j ∈ N . According to the ab o v e, for all pairs of distinct indices ( i, j ) in I , we hav e m i 6 = m j ∨ S i 6 = S j ∨ T i 6 = T j . As a consequence, | I | ≤ B = | M | · 4 | Q | . No w following the pro of of Lemma 3.5, for m = | Q | B +1 , Agents has a strategy τ m in the m -p opulation game of following the transfer graphs suggested b y τ . In other words, when it is Agen ts’s turn to play in the m -p opulation game, and the pla y so far π = q 0 a 1 − → q 1 · · · q n a n +1 − → is pro jected via Φ m to a pla y ρ = S 0 a 1 ,G 1 − → S 1 · · · S n a n +1 − → in the capacit y game, let G n +1 = τ ( ρ ) b e the decision of Agents at this p oin t in the capacity game. Then, to determine q n +1 , τ m splits evenly the agents in q n along every edge of G n +1 . Since the capacity of ρ is b ounded b y B , the argumen t in the pro of of Lemma 3.5 shows that q n has at least | Q | agen ts in each state and thus { ( q n [ i ] , q n +1 [ i ]) | 1 ≤ i ≤ m } = G n +1 . This means that the pro jected play Φ m ( π q n +1 ) contin ues to b e consistent with τ and its supp ort will nev er reach { f } . Thus τ m guaran tees that not all agents will b e in target state m sim ultaneously , and hence is a winning strategy for Agents in the m -p opulation game. As consequence of Prop osition 3.8, the p opulation con trol problem can b e decided by explicitly computing the parity game and solving it, in 2 EXPTIME . In the next section we will improv e this complexity b ound to EXPTIME . q 0 f q 1 q 2 q 3 q 4 a a a a b b b b b c c c c c c c Figure 5: NF A where Controller needs memory to win the asso ciated capacity game. V ol. 15:3 CONTROLLING A POPULA TION 6:13 W e conclude with an example showing that, in general, p ositional strategies are not sufficien t to win the capacity game. Consider the example of Figure 5, where the only w a y for Controller to win is to reach a supp ort without q 2 and play c . With a memoryless strategy , Controller cannot win the capacity game. There are only tw o memoryless strategies from supp ort S = { q 1 , q 2 , q 3 , q 4 } . If Controller only plays a from S , the supp ort remains S and the play has b ounded capacity . If he only plays b ’s from S , then Agen ts can split agents from q 3 to b oth q 2 , q 4 and the play remains in supp ort S , with b ounded capacit y . In b oth cases, the play has finite capacity and Controller loses. Ho w ev er, Con troller can win the capacity game. His (finite-memory) winning strategy σ consists in first pla ying c , and then pla ying alternatively a and b , until the supp ort do es not contain { q 2 } , in which case he plays c to win. Two consecutive steps ab send q 2 to q 1 , q 1 to q 3 , q 3 to q 3 , and q 4 to either q 4 or q 2 . T o preven t Controller from pla ying c and win, Agen ts needs to spread from q 4 to b oth q 4 and q 2 ev ery time ab is play ed. Consider the accum ulator T defined by T 2 i = { q 1 , q 2 , q 3 } and T 2 i − 1 = { q 1 , q 2 , q 4 } for every i > 0. It has an infinite num b er of entries (from q 4 to T 2 i ). Hence Controller wins if this play is executed. Else, Agents even tually keeps all agents from q 4 in q 4 when ab is play ed, implying the next supp ort do es not contain q 2 . Strategy σ is th us a winning strategy for Con troller. 4. Sol ving the cap acity game in EXPTIME T o solve efficiently the capacity game, we build an equiv alent exp onential size parity game with a p olynomial num b er of parities. T o do so, we enric h the supp ort arena with a tr acking list resp onsible of chec king whether the play has finite capacity . The tracking list is a list of transfer graphs, which are used to detect certain patterns called le aks . 4.1. Leaking graphs. In order to detect whether a pla y ρ = S 0 a 1 ,G 1 − → S 1 a 2 ,G 2 − → . . . has finite capacity , it is enough to detect le aking graphs (characterising entries of accum ulators). F urther, leaking graphs ha v e sp ecial sep ar ation properties whic h will allow us to track a small n um b er of graphs. F or G, H t w o graphs, we denote ( a, b ) ∈ G · H iff there exists z with ( a, z ) ∈ G, and ( z , b ) ∈ H . Definition 4.1 (Leaks and separations) . Let G, H b e tw o transfer graphs. W e sa y that G le aks at H if there exist states q , x, y with ( q , y ) ∈ G · H , ( x, y ) ∈ H and ( q , x ) / ∈ G . W e say that G sep ar ates a pair of states ( r , t ) if there exists q ∈ Q with ( q , r ) ∈ G and ( q , t ) 6∈ G . Denote by Sep ( G ) the set of all pairs ( r , t ) whic h are separated by G . • q • x • • y G H • q • t • r G Figure 6: Left: G leaks at H ; Right: G separates ( r , t ). The tracking list will b e comp osed of concatenated graphs tr acking i of the form G [ i, j ] = G i +1 · · · G j relating S i with S j : ( s i , s j ) ∈ G [ i, j ] if there exists ( s k ) i i , G [ i, j ] sep ar ates some ( r , t ) ∈ R j . (4) If i < j < n then Sep ( G [ i, n ]) ⊆ Sep ( G [ j, n ]) . V ol. 15:3 CONTROLLING A POPULA TION 6:15 Pr o of. W e start with the pro of of the first item. Assume that G [ i, n ] separates a pair ( r , t ) ∈ R n . Hence there exists q suc h that ( q , r ) ∈ G [ i, n ], ( q , t ) / ∈ G [ i, n ]. Since ( r , t ) ∈ R n , there is an index k > n and a state y suc h that ( r , y ) ∈ G [ n, k ] and ( t, y ) ∈ G [ n, k ]. Hence, there exists a path ( t j ) n ≤ j ≤ k with t n = t , t k = y , and ( t j , t j +1 ) ∈ G j +1 for all n ≤ j < k . Moreo v er, there is a path from q to y b ecause there are paths from q to r and from r to y . Let ` ≤ k b e the minimum index such that there is a path from q to t ` . As there is no path from q to t n = t , necessarily ` ≥ n + 1. Obviously , ( t ` − 1 , t ` ) ∈ G ` , and b y definition and minimalit y of ` , ( q , t ` − 1 ) / ∈ G [ i, ` − 1] and ( q , t ` ) ∈ G [ i, ` ]. That is, G [ i, ` − 1] leaks at G ` . Let us no w prov e the second item, using the first one. Assume that i do es not leak infinitely often, and tow ards a con tradiction supp ose that there are infinitely many j ’s such that G [ i, j ] separates some ( r , t ) ∈ R j . T o each of these separations, w e can apply item 1. to obtain infinitely many indices m such that G [ i, m ] leaks at G m +1 , a contradiction. W e now prov e the third item. Since there are finitely many states in Q , there exists q ∈ Q and an infinite set J of indices such that for ev ery j ∈ J , ( q , y j +1 ) ∈ G [ i, j + 1], ( q , x j ) / ∈ G [ i, j ], and ( x j , y j +1 ) ∈ G j +1 for some x j , y j +1 . The path from q to y j +1 implies the existence of y j with ( q , y j ) ∈ G [ i, j ], and ( y j , y j +1 ) ∈ G j +1 . W e hav e th us found separated pairs ( x j , y j ) ∈ R j for every j ∈ J . T o exhibit separations at other indices k > j with k / ∈ J , the natural idea is to consider predecessors of the x j ’s and y j ’s. i k j j +1 • q • r k • t k • x j • y j • y j +1 G [ i, k ] G [ k , j ] G j +1 W e define sequences ( r k , t k ) k ≥ i inductiv ely as follows. T o define r k , we take a j ≥ k + 1 suc h that j ∈ J ; this is alwa ys p ossible as J is infinite. There exists a state r k suc h that ( q , r k ) ∈ G [ i, k ] and ( r k , y j ) ∈ G [ k , j ]. Also, as x j b elongs to Im ( G [1 , j ]), there m ust exist a state t k suc h that ( t k , x j ) ∈ G [ k , j ]. Clearly , ( q , t k ) / ∈ G [ i, k ], else ( q , x j ) ∈ G [ i, j ], which is not true. Last, y j +1 is a common successor of t k and r k , that is ( t k , y j +1 ) ∈ G [ k , j + 1] and ( r k , y j +1 ) ∈ G [ k , j + 1]. Hence G [ i, k ] separates ( r k , t k ) ∈ R k . F or the last item, let ( r , t ) ∈ Sep ( G [ i, n ]) and pic k q ∈ Q suc h that ( q , r ) ∈ G [ i, n ] but ( q , t ) / ∈ G [ i, n ]. Since ( q , r ) ∈ G [ i, n ] there exists q 0 ∈ Q so that ( q , q 0 ) ∈ G [ i, j ] and ( q 0 , r ) ∈ G [ j, n ]. It also follows that ( q 0 , t ) / ∈ G [ j, n ] since ( q , q 0 ) ∈ G [ i, j ] but ( q , t ) / ∈ G [ i, n ]. Th us we hav e sho wn ( r, t ) ∈ Sep ( G [ j, n ]). 4.2. The trac king list. Giv en a fixed index i , figuring out whether i is leaking or not can b e done using a deterministic automaton. How ever, when one wan ts to decide the existence of some index that leaks, naively , one would hav e to keep track of runs starting from all p ossible indices i ∈ N . The tracking list will allow us to track only quadratically man y indices at once. The tr acking list exploits the relationship b etw een leaks and separations. It is a list of transfer graphs which altogether separate all p ossible pairs of states 1 , and are sufficien t to detect when leaks o ccur. 1 It is sufficient to consider pairs in R j . How ever, as R j is not known a priori , we consider all pairs in Q 2 . 6:16 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 By item (4) in Lemma 4.2, for an y n , Sep ( G [1 , n ]) ⊆ Sep ( G [2 , n ]) ⊆ · · · Sep ( G [ n, n ]). The exact tracking list L n at step n is defined as a list of k ≤ | Q | 2 graphs G [ i 1 , n ] , · · · , G [ i k , n ], where 1 ≤ i 1 < i 2 < · · · < i k ≤ n is the list of indices for whic h Sep ( G [ i − 1 , n ]) 6 = Sep ( G [ i, n ]) (with the conv ention that Sep ( G [0 , n ]) = ∅ ). Consider the sequence of graphs in Figure 7, obtained from alternating try and retry in the example from Figure 2 where Agents splits agents whenever p ossible. 0 1 2 3 4 5 try try try retry retry G 1 G 2 G 3 G 4 G 5 • q 0 • q 0 • q 0 • q > • q > • q > • q ⊥ • q ⊥ • q ⊥ • k • k • k • k Figure 7: Sequence of graphs asso ciated with a run. Let us compute Sep ( G [ i, 5]) on that example for 0 ≤ i ≤ 4. The graph G [0 , 5] = G 1 · · · G 5 has the following edges: ( q 0 , q > ) , ( q 0 , q ⊥ ) , ( q 0 , k ), and thus Sep ( G [0 , 5]) = ∅ . In compari- son, Sep ( G [1 , 5]) = { ( k , q > ) , ( k , q ⊥ ) } b ecause ( q ⊥ , k ) is an edge of G [1 , 5] and ( q ⊥ , q > ) and ( q ⊥ , q ⊥ ) are not. Also, Sep ( G [2 , 5]) = { ( k , q > ) , ( k , q ⊥ ) } . Finally Sep ( G [3 , 5]) = Sep ( G [4 , 5]) = { ( k , q > ) , ( k , q ⊥ ) , ( q > , k ) , ( q ⊥ , k ) } . Th us, L 5 = ( G [1 , 5]; G [3 , 5]). Notice that G [1 , 5] = { ( q > , q > ) , ( q > , q ⊥ ) , ( q > , k ) , ( q ⊥ , k ) } and G [3 , 5] = { ( q > , q > ) , ( q > , q ⊥ ) , ( q ⊥ , k ) , ( k , k ) } . The exact tracking list L n allo ws one to test for infinite leaks, but computing it with p olynomial memory seems hard. Instead, we prop ose to approximate the exact tracking list in to a list, namely the tracking list L n , which needs only p olynomial memory to b e computed, and which is sufficient for finding infinite leaks. The trac king list L n is also of the form { G [ i 1 , n ] , G [ i 2 , n ] , . . . G [ i k , n ] } where 0 ≤ i 1 < i 2 . . . i k < n with ∅ 6 = Sep ( G [ i r , n ]) ( Sep ( G [ i r +1 , n ]). It is is computed inductively in the follo wing wa y: L 0 is the empty list. F or n > 0, the list L n is computed from L n − 1 and G n in three stages by the following up date list algorithm: (1) First, every graph G [ i, n − 1] in the list L n − 1 is concatenated with G n , yielding G [ i, n ]. (2) Second, G n = G [ n − 1 , n ] is added at the end of the list. (3) Lastly , the list is filtered: a graph H is k ept if and only if it separates a pair of states ( p, q ) ∈ Q 2 whic h is not separated by any graph that app ears earlier in the list. 2 Under this definition, L n = { G [ i j , n ] | 1 ≤ j ≤ k , Sep ( G [ i j − 1 , n ]) 6 = Sep ( G [ i j , n ]) } , with the con v en tion that Sep ( G [ i 0 , n ]) = ∅ . Notice that the tracking list L n ma y differ from the exact tracking list L n , as shown with the example on Figure 8. W e hav e L 3 = ( G [1 , 3] , G [2 , 3]), as G [0 , 3] = G 1 · · · G 3 do es not separate an y pair of states, G [1 , 3] = G 2 · G 3 separates ( q 1 , q 2 ) and G [2 , 3] = G 3 separates ( q 1 , q 2 ) and ( q 2 , q 1 ). How ever, L 3 = ( G [2 , 3]) 6 = L 3 . Indeed, L 2 = L 2 = ( G [0 , 2]) as G [0 , 2] = G 1 · G 2 and G [1 , 2] = G 2 separate exactly the same pairs ( q 1 , q 2 ); ( q 1 , q 3 ); ( q 2 , q 3 ); ( q 3 , q 2 ). Applying the up date list algorithm, we obtain the intermediate list (G[0,3],G[2,3]) after 2 This algorithm can be p erformed without knowing the indices ( i j ) j ≤ k , but just the graphs ( G [ i j , n ]) j ≤ k . V ol. 15:3 CONTROLLING A POPULA TION 6:17 0 1 2 3 • q 1 • q 1 • q 1 • q 1 • q 2 • q 2 • q 2 • q 2 • q 3 • q 3 G 1 G 2 G 3 Figure 8: Example where the trac king list L 3 differs from the exact tracking list L 3 . stage 2. As G [0 , 3] separates no pair of states, it is filtered out in stage 3. W e obtain L 3 = ( G [2 , 3]) 6 = L 3 . Let L n = { H 1 , · · · , H ` } b e the tracking list at step n . Each transfer graph H r ∈ L n is of the form H r = G [ t r , n ]. W e say that r is the level of H r , and t r the index tr acke d by H r . Observ e that the lo w er the level of a graph in the list, the smaller the index it tracks. When we consider the sequence of tracking lists ( L n ) n ∈ N , for every index i , either it ev en tually stops to b e track ed or it is track ed forev er from step i , i.e. for ev ery n ≥ i , G [ i, n ] is not filtered out from L n . In the latter case, i is said to b e r emanent (it will never disapp ear). Lemma 4.4. A play has infinite c ap acity iff ther e exists an index i such that i is r emanent and le aks infinitely often. Pr o of. Because of Lemma 4.2 w e only need to sho w that if there is an index i that leaks infinitely often, then there is an index which is remanent and leaks infinitely often. Let i b e the smallest index that leaks infinitely often. By Lemma 4.3 (2) there is an N > i so that whenev er j < i < N ≤ n , Sep ( G [ j, n ]) ∩ R n = ∅ . Similarly , by Lemma 4.3 (3), for ev ery n > i , Sep ( G [ i, n ]) ∩ R n 6 = ∅ . Com bined with Lemma 4.3 (4), this implies that there is some index j ∗ ≥ i whic h is remanen t. Indeed, let L N = { G [ i 1 , N ] , G [ i 2 , N ] . . . G [ i k , N ] } and let j ∗ = min { i r | i r ≥ i } . Index j ∗ exists b ecause for an y i r < i , Sep ( G [ i r , N ]) ( Sep ( G [ i, N ]) ⊆ Sep ( G [ N − 1 , N ]). The strict inequalit y arises b ecause Sep ( G [ i r , N ]) ∩ R N = ∅ but Sep ( G [ i, N ]) ∩ R N 6 = ∅ . By the same argument, for every n ≥ N and i r < i , Sep ( G [ i r , n ]) ∩ R n = ∅ and Sep ( G [ j ∗ , n ]) ∩ R n ⊇ Sep ( G [ i, n ]) ∩ R n 6 = ∅ . This shows that j ∗ is remanent. By Lemma 4.3 (2), index j ∗ also leaks infinitely often. 4.3. The parit y game. W e no w describ e a parity game P G , which extends the supp ort arena with on-the-fly computation of the tracking list. Priorities. By conv ention, low est priorities are the most imp ortant and the o dd parity is go o d for Con troller, so Con troller wins iff the lim inf of the priorities is o dd. With eac h le v el 1 ≤ r ≤ | Q | 2 of the trac king list are associated tw o priorities 2 r (graph G [ i r , n ] non-remanen t) and 2 r + 1 (graph G [ i r , n ] leaking), and on top of that are added priorities 1 (goal reached) and 2 | Q | 2 + 2 (nothing), hence the set of all priorities is { 1 , . . . , 2 | Q | 2 + 2 } . When Agents chooses a transition lab elled by a transfer graph G , the trac king list is up dated with G and the priorit y of the transition is determined as the smallest among: priorit y 1 if the supp ort { f } has ever b een visited, priorit y 2 r + 1 for the smallest r suc h 6:18 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 that H r (from lev el r ) leaks at G , priorit y 2 r for the smallest level r where graph H r w as remo v ed from L , and in all other cases priorit y 2 | Q | 2 + 2. States and transitions. G ≤| Q | 2 denotes the set of list of at most | Q | 2 transfer graphs. • States of P G form a subset of { 0 , 1 } × 2 Q × G ≤| Q | 2 , eac h state b eing of the form ( b, S, H 1 , . . . , H ` ) with b ∈ { 0 , 1 } a bit indicating whether the supp ort { f } has b een seen, S the current supp ort and ( H 1 , . . . , H ` ) the trac king list. The initial state is (0 , { q 0 } , ε ), with ε the empty list. • T ransitions in P G are all ( b, S, H 1 , . . . , H ` ) p ,a,G − → ( b 0 , S 0 , H 0 1 , . . . , H 0 ` 0 ) where p is the priority , and such that S a,G − → S 0 is a transition of the supp ort arena, and (1) ( H 0 1 , . . . , H 0 ` 0 ) is the tracking list obtained by up dating the trac king list ( H 1 , . . . , H ` ) with G , as explained in subsection 4.2; (2) if b = 1 or if S 0 = { f } , then p = 1 and b 0 = 1; (3) otherwise b 0 = 0. In order to compute the priorit y p , we let p 0 b e the smallest level 1 ≤ r ≤ ` suc h that H r leaks at G and p 0 = ` + 1 if there is no such level, and we also let p 00 as the minimal lev el 1 ≤ r ≤ ` suc h that H 0 r 6 = H r · G and p 00 = ` + 1 if there is no such level. Then p = min(2 p 0 + 1 , 2 p 00 ). W e are ready to state the main result of this pap er, which yields an EXPTIME complexit y for the p opulation control problem. This entails the first statement of Theorem 2.5, and together with Prop osition 3.10, also the first statement of Theorem 2.7. Theorem 4.5. Contr ol ler wins the game P G if and only if Contr ol ler wins the c ap acity game. Solving these games c an b e done in time O (2 (1+ | Q | + | Q | 4 )(2 | Q | 2 +2) ) . Str ate gies with 2 | Q | 4 memory states ar e sufficient to b oth Contr ol ler and A gents. Pr o of. The state space of parity game P G is the product of the set of supp orts with a deterministic automaton computing the trac king list. There is a natural corresp ondence b et w een plays and strategies in the parity game P G and in the capacity game. Con troller can win the parity game P G in tw o wa ys: either the play visits the supp ort { f } , or the priority of the play is 2 r + 1 for some level 1 ≤ r ≤ | Q | 2 . By design of P G , this second p ossibility o ccurs iff r is remanent and leaks infinitely often. According to Lemma 4.4, this o ccurs if and only if the corresp onding pla y of the capacit y game has infinite capacity . Th us Controller wins P G iff he wins the capacity game. In the parity game P G , there are at most 2 1+ | Q | 2 | Q | 2 | Q | 2 = 2 1+ | Q | + | Q | 4 states and 2 | Q | 2 + 2 priorities, implying the complexit y b ound using state-of-the-art algorithms [ 18 ]. Actually the complexity is even quasi-p olynomial according to the algorithms in [ 10 ]. Notice ho w ev er that this has little impact on the complexity of the p opulation control problem, as the num b er of priorities is logarithmic in the num b er of states of our parity game. F urther, it is w ell kno wn that the winner of a parity game has a p ositional winning strategy [ 18 ]. A p ositional winning strategy σ in the game P G corresp onds to a finite- memory winning strategy σ 0 in the capacity game, whose memory states are the states of P G . Actually in order to play σ 0 , it is enough to remember the tracking list, i.e. the third comp onen t of the state space of P G . Indeed, the second comp onent, in 2 Q , is redundan t with the actual state of the capacit y game and the bit in the first comp onent is set to 1 when the pla y visits { f } but in this case the capacity game is won by Con troller whatev er is pla y ed afterwards. Since there are at most 2 | Q | 4 differen t tracking lists, we get the upp er b ound on the memory . V ol. 15:3 CONTROLLING A POPULA TION 6:19 5. Number of steps before Synchr oniza tion In this section, w e will restrict ourselv es to c ontr ol lable NF As , that is p ositive instances of the p opulation control problem. T o b e useful in the presence of man y agents, the controller should b e able to gather all agents in the target state in a reasonable time (counted as the n um b er of actions pla y ed b efore synchronization). Notice that this notion is similar to the termination time used for p opulation proto cols in [8]. 5.1. Dep endency with resp ect to the num b er of agen ts. W e first sho w that there are con trollable NF As for which Controller requires a quadratic num b er of steps (in the n um b er of agen ts) against the b est strategy of Agents. Consider again the NF A A time from Figure 2 (see also Figure 9, left). Recall that A time is controllable. Lemma 5.1. F or the NF A A time , Contr ol ler r e quir es Θ( m 2 ) steps to win in the worst c ase. Pr o of. A winning strategy σ for Controller is to play try follo w ed by keep un til only one of q > or q ⊥ is filled, in which case action top or bottom can b e play ed to mov e the asso ciated agen ts to the target state.This will even tually happ en, as the n um b er of agents in q > and in q ⊥ is decreasing while the num b er of agen ts in state k increases up on ( try ; keep ) and when q ⊥ is not empty . This is the strategy generated from our algorithm. W e now argue on the n um ber of steps σ needed to send all agents to the target state. Observ e that the only non-deterministic action is try from state q 0 . Clearly enough, regarding the num b er of steps b efore sync hronisation, Agents’ b est answer is to mov e one agen t in q ⊥ and the remaining agents in q > up on eac h try action. Letting m b e the n um b er of agents, the run asso ciated with σ and the b est counterstrategy for Agents is ( try ; keep ) m − 1 ; bot ; restart ; ( try ; keep ) m − 2 ; bot ; restart · · · try ; keep ; bot and its size is P m − 1 i =1 (2 i + 2) − 1 = O ( m 2 ). The system thu s requires a quadratic num ber of steps b efore sync hronisation, and this is the w orst case. Notice that the ab ov e result only needs a fixed n um b er of states, namely 6. q 0 q > q ⊥ k try try keep top keep bot restart Σ \ { restart } Σ m 2 - Gadget Figure 9: NF A A time on alphab et Σ and its abstraction into the gadget m 2 - Gadget . 6:20 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 5.2. P olynomial b ound on the n um b er of steps for synchronization. W e now sho w that w e can build an NF A with n states such that the system requires order m 0( n ) steps b efore synchronisation. F or that, we turn the system A time in to a gadget, as shown on Figure 9. This gadget will b e used in an inductive manner to obtain an NF A for whic h m 0( n ) steps b efore sync hronisation are required against the b est strategy of Agents. First, we construct an NF A which requires O ( m 4 ) steps b efore sync hronisation. Essen- tially we replace the edge from q 0 to q > in the NF A A time b y the m 2 - Gadget to obtain the NF A A 4 on Figure 10. The alphab et Σ of actions of the m 2 - Gadget is a disjoin t cop y of the alphab et Σ of actions of A time . In particular, playing any action of Σ when any tok en is in the m 2 - Gadget leads to the losing sink state / . q 0 m 2 - Gadget q > q ⊥ k f try try keep top Σ keep bot Σ restart Σ ∪ Σ \ { restart } Σ ∪ Σ Figure 10: The NF A A 4 whic h requires Θ( m 4 ) steps to synchronize all agen ts into the final state. State q > is the output state of the m 2 - Gadget . Consider the strategy of Agen ts which is to place 1 agent in q ⊥ (resp. q ⊥ ) and the rest to q > (resp. q ⊥ ) when action try (resp. try ) is play ed. Relying on Lemma 5.1, an y strategy of Controller needs m 2 steps to place 1 agent in k , then ( m − 1) 2 steps for the next agent, etc. Th us, any strategy needs O ( m 3 ) steps to place 1 agent in the target state f . Finally , an y strategy needs O ( m 4 ) steps to place all the agen ts in the target state f . W e thus obtain: Lemma 5.2. F or the NF A A 4 , Contr ol ler r e quir es Θ( m 4 ) steps to win in the worst c ase. One can rep eat this construction, nesting copies of the m 2 - Gadget . At each new gadget, the num b er of states in the NF A increases by a constant amount, namely 4. The ` -la y ered NF A, consisting of ` − 1 nested gadgets, has 4 ` + 2 states and requires Θ( m 2 ` ) steps b efore sync hronisation. W e thu s derive the following upp er-b ound on the time to synchronisation: Corollary 5.3. Ther e exist NF As with | Q | states such that m | Q |− 2 2 steps ar e r e quir e d by any str ate gy to synchr onise m agents. 5.3. Optimalit y of the winning strategy. In this subsection, we show that the winning strategy built by our algorithm is optimal, in the sense that it never requires more than m | Q | O (1) steps to synchronize m agen ts. F or A a controllable NF A, we write σ A the winning strategy built by our algorithm. Theorem 5.4. F or A with | Q | states, σ A ne e ds at most m | Q | × 2 | Q | 4 steps to synchr onise m agents in the tar get state f . V ol. 15:3 CONTROLLING A POPULA TION 6:21 T o prov e Theorem 5.4, an essential ingredient is the following: Lemma 5.5. L et m b e a memory state of σ A , S 6 = { f } a supp ort and H a tr ansfer gr aph such that (i) ( m , S ) is r e achable under σ A , (ii) H is c omp atible with σ A fr om ( m , S ) , and (iii) H is a lo op ar ound ( m , S ) . Then, ther e exists a p artition S = T ] U such that H ( U ) ⊆ U and H ( T ) ∩ U 6 = ∅ , wher e H ( X ) = { q ∈ S | ∃ p ∈ X , ( p, q ) ∈ H } . In tuitiv ely , letting G a run according to σ A reac hing ( m , S ), the run GH ω is also according to σ A . As σ A is winning, GH ω m ust b e non realisable, that is GH ω needs to ha v e an accumulator with an infinite num b er of entries. W e prov e in this lemma that for a rep eated graph H , there is a structural c haracterisation of accumulators with an infinite n um b er of en tries: S can b e partitioned into U ] T , where U corresp onds to a structural accum ulator, and there is one en try from T to U for eac h H . Pr o of. As Controller is winning, the play GH ω m ust hav e infinite capacity . By Lemma 4.2, there exist an index i and an infinite sequence of indices j > i suc h that H j − i leaks at H . Because the same graph H is rep eated, we can assume wlog that i = 0. As the n um b er of states is finite, there exists a triple ( q , x, y ) such that ( q , y ) ∈ H j +1 , ( x, y ) ∈ H and ( q , x ) / ∈ H j for all j ’s in an infinite set J of indices. Let ` b e the num b er of steps in G . W e consider H atomic, that is, as if it is a single step. F or ev ery state s ∈ S , define A s = ( A s n ) n ∈ N the smallest accumulator with A s ` = { s } . If an y state s ∈ S is suc h that s / ∈ A s n for an y n > ` , then we are done as we can set U = S n>` A s n , and T = S \ U . Indeed, s / ∈ U , and s has a successor in U (an y state in A s ` +1 ). W e can th us assume that s ∈ S n>` A s n for all s ∈ S . Let U = S n>` A y n = S n ≥ ` A y n as y ∈ S n>` A y n and A y ` = { y } . Let T = S \ U . W e will sho w that this choice of ( T , U ) satisfies the condition of the statement. In particular, we will show that x / ∈ U , and as ( x, y ) ∈ H and y ∈ U , we are done. Let k x , k y > 0 such that ( x, x ) ∈ H k x , and ( y , y ) ∈ H k y . Let k = k x × k y . P artition J in to sets J r = { j | j = r ( mo d k ) } , for r < k . As J is infinite, one of J r m ust b e infinite. T aking tw o indices j, j 0 ∈ J r , we hav e that j 0 − j is a multiple of k . In particular, we hav e ( x, x ) ∈ H j 0 − j and ( y , y ) ∈ H j 0 − j . W e also kno w that ( y , x ) / ∈ H j 0 − j − 1 as ( q , x ) / ∈ H j 0 and ( q , y ) ∈ H j +1 . F or any state s ∈ S , let w idth ( s ) = max n ( | A s n | ). Easily , for all s ∈ U , w idth ( s ) ≤ w idth ( y ), as s can b e reached b y y , let say in v steps, and hence A s n ⊆ A y n + v . W e now show that w idth ( x ) > w idth ( y ), whic h implies that x / ∈ U , and we are done. F or all n , w e hav e A y n ⊆ A x n +1 , as ( x, y ) ∈ H . Now, there are tw o indices j, j 0 ∈ J r suc h that j 0 − j > n + 1, as J r is infinite. Let z suc h that ( x, z ) ∈ H n +1 and ( z , x ) ∈ H j 0 − j − n − 1 , which must exists as ( x, x ) ∈ H j 0 − j . As ( y , x ) / ∈ H j 0 − j − 1 , we hav e ( y , z ) / ∈ H n . That is, z ∈ A x n +1 \ A y n . Thus, | A x n +1 | ≥ | A y n | + 1, and th us w idth ( x ) > width ( y ). W e can no w prov e Theorem 5.4: Pr o of. Assume by contradiction that there is a run consistent with σ A lasting more than m | Q | × 2 | Q | 4 steps b efore synchronisation. Because there are no more than 2 | Q | 4 differen t memory states, there is one memory state m whic h is rep eated at least m | Q | times. Let us decomp ose the path as G 1 G 2 · · · G m | Q | , such that G i . . . G j is a lo op around m , for all 1 ≤ i < j ≤ m | Q | . W e write S for the supp ort asso ciated with m . 6:22 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 By Lemma 5.5 applied with H = G 1 G 2 · · · G m | Q | , there exists a partition S = T ] U , suc h that H ( U ) ⊆ U and H ( T ) ∩ U 6 = ∅ . W e define a sequence U 1 , . . . , U m | Q | of supp orts inductiv ely as follows: • U m | Q | = U , and • for i = m | Q | to i = 1, U i − 1 = { s ∈ S | G i ( { s } ) ⊆ U i } . W e further write T i = S \ U i . W e hav e U ⊆ U 0 ( S , and U i 6 = ∅ as G i ( U i − 1 ) ⊆ U i for all i . In the same w a y , U i 6 = S for all i as otherwise we would hav e U m | Q | = S , a contradiction with U m | Q | = U 6 = S . Hence T i 6 = ∅ for all i . Consider now the set K of indices i suc h that G i ( T i − 1 ) ∩ U i 6 = ∅ . By Lemma 5.5, K is nonempty . Moreov er, since there are m agen ts, | K | < m , otherwise, T 0 w ould contain at least m more agents than T m | Q | . Thus 1 ≤ | K | < m . Hence, there are t w o indices i < j ∈ K that are far enough, i.e. such that j − i > m | Q |− 1 , with k / ∈ K for all i < k < j . Therefore, for every k b et w een i and j , G k ( T k − 1 ) = T k and G k ( U k − 1 ) = U k : no agent is transferred from ( T k ) i ≤ k ≤ j to ( U k ) i ≤ k ≤ j in the fragment G i · · · G j . W e say that ( T k ) i ≤ k ≤ j and ( U k ) i ≤ k ≤ j do not communicate. In particular, w e hav e 2 non-empty disjoin t subsets T i , U i of Q . W e will inductively partition at each step at least one of the sequences in to 2 non-communicating subsequences. Even tually , w e obtain | Q | + 1 non-communicating subsequences, and in particular | Q | + 1 non-empty disjoint subsets of Q , a contradiction. Applying Lemma 5.5 again on H 0 = G i · · · G j yields a partition S 0 = T 0 ] U 0 . W e define in the same w a y U 0 j = U 0 and inductively U 0 k for k = j − 1 , . . . , i . As ab ov e, there are less than m indices i 0 ∈ [ i, j ] suc h that G i 0 ( T 0 i 0 − 1 ) ∩ U i 0 6 = ∅ . W e can thus find an interv al [ i 0 , j 0 ] ( [ i, j ] such that j 0 − i 0 > m | Q |− 2 and ( T 0 k ) i 0 ≤ k ≤ j 0 and ( U 0 k ) i 0 ≤ k ≤ j 0 do not communicate. T o sum up, (any pair of ) the four follo wing sequences do not communicate together: • ( T k ∩ T 0 k ) i 0 ≤ k ≤ j 0 , ( T k ∩ U 0 k ) i 0 ≤ k ≤ j 0 , • ( U k ∩ T 0 k ) i 0 ≤ k ≤ j 0 and ( U k ∩ U 0 k ) i 0 ≤ k ≤ j 0 . F or any of these four sequences ( X k ) i 0 ≤ k ≤ j 0 , if X k 6 = ∅ for some k , then X k 6 = ∅ for all k (as these 4 sequences do not communicate together and they partition S ), in whic h case w e sa y that the sequence is non-empty . Now some of these sequences ma y b e empty . Y et, we argue that at least 3 of them are non-empty . Indeed, for at least one index i ≤ k < j , we hav e G k ( T 0 k − 1 ) ∩ U 0 k 6 = ∅ . As there is no comm unication b et w een ( T k ) i ≤ k ≤ j and ( U k ) i ≤ k ≤ j , at least one of T k , U k , let say T k , con tains at least one state from T 0 k and one state from U 0 k . Assuming | j 0 − i 0 | maximal, we can choose k = i 0 (else we hav e a contradiction with | j 0 − i 0 | maximal, unless i 0 = i , in which case w e can choose k = j 0 + 1). That is, T i 0 ∩ T 0 i 0 6 = ∅ and T i 0 ∩ U 0 i 0 6 = ∅ , and b oth sequences are non-empty . Obviously at least one of U i 0 ∩ T 0 i 0 and U i 0 ∩ U 0 i 0 should b e non-empty as U i 0 = ( U i 0 ∩ T 0 i 0 ) ∪ ( U i 0 ∩ U 0 i 0 ) is nonempty , and this gives us the third non-empty sequence. Hence, we ha v e three non-empty sequences such that no pair of these sequences communicate b et w een i 0 and j 0 . W e can iterate once more to obtain i 00 < j 00 with j 00 − i 00 > m | Q |− 3 , and four non-empty sequences, such that no pair of these sequences communicate b et w een i 00 and j 00 . This is b ecause 1 non-empty sequence contains states from b oth U 00 and T 00 , giving 2 non-empty sequences, and the 2 other non-empt y sequences giv es at least 2 non-empt y sequences. Ob viously , this op eration can b e made at most | Q | times, as it would result into | Q | + 1 non-empt y and pairwise disjoint subsets of Q . W e thus obtain a con tradiction with the n um b er of steps b eing more than m | Q | × 2 | Q | 4 . V ol. 15:3 CONTROLLING A POPULA TION 6:23 6. Lower bounds The pro ofs of Theorems 2.5 and 2.7 are concluded b y the pro ofs of low er b ounds. Theorem 6.1. The p opulation c ontr ol pr oblem is EXPTIME -har d. Pr o of. W e first prov e PSP A CE -hardness of the p opulation con trol problem, reducing from the halting problem for p olynomial space T uring machines. W e then extend the result to obtain the EXPTIME -hardness, by reducing from the halting problem for p olynomial space alternating T uring machines. Let M = ( S, Γ , T , s 0 , s f ) b e a T uring machine with Γ = { 0 , 1 } as tap e alphab et. By assumption, there exists a p olynomial P suc h that, on initial configuration x ∈ { 0 , 1 } n , M uses at most P ( n ) tap e cells. A transition t ∈ T is of the form t = ( s, s 0 , b, b 0 , d ), where s and s 0 are, resp ectively , the source and the target con trol states, b and b 0 are, resp ectively , the symbols read from and written on the tap e, and d ∈ {← , → , −} indicates the mo v e of the tap e head. F rom M and x , we build an NF A A = ( Q, Σ , q 0 , ∆) with a distinguished state Acc suc h that, M terminates in s f on input x if and only if ( A , Acc ) is a p ositive instance of the p opulation control problem. No w we describ e the states of NF A A . They are given by: Q = Q cells ∪ Q pos ∪ Q cont ∪ { q 0 , Acc , / } where • Q cells = S P ( n ) i =1 { 0 i , 1 i } are the states for the cells conten ts of M , one p er bit and p er p osition; • Q pos = { p i | 1 ≤ i ≤ P ( n ) } are the states for the p osition of tap e head of M ; • Q cont = S are the states for the control state of M ; • q 0 is the initial state of A , Acc is a sink winning state and / is a sink losing state. A configuration of the T uring machine, of the form ( q , p, x ) ∈ S × [ P ( n )] × { 0 , 1 } P ( n ) , is represen ted by any configuration of A m suc h that the set of states with at least one agen t is { q , p } ∪ { 0 i | x i = 0 } ∪ { 1 i | x i = 1 } . With each transition t = ( s, s 0 , b, b 0 , d ) in the T uring machine and eac h p osition p of the tap e, we asso ciate an action a t,p in A , which simulates the effect of transition t when the head p osition is p . F or instance, Fig. 11 represen ts the transitions asso ciated with action a t,k , for the transition t = ( q i , q j , 0 , 1 , → ) of the T uring Machine and p osition k on the tap e. Note that if agen ts are in the states represen ting a configuration of the T uring mac hine, then the only action Controller can take to a v oid / is to play a t,p where p is the current head p osition and t is the next allow ed transition. Moreo v er on doing this, the next state in A m exactly represents the next configuration of the T uring machine. There are also winning actions called check ( Q 0 ) for certain subsets Q 0 ⊆ Q . Controller should only pla y these when no agen ts are in Q 0 . One of them is for Q 0 = Q cont \ { s f } whic h can effectively only b e play ed when the T uring mac hine reaches s f , indicating that M has accepted the input x . check ( Q 0 ) for other subsets Q 0 are used to ensure that Agen ts sets up the initial configuration of the T uring machine correctly (see the formal definition of the transitions at the end of the construction). Let us now describ e the transitions of A in more detail. The actions are • Σ = Σ trans ∪ Σ check ∪ { start } , with – Σ trans = T × { 1 , . . . , P ( n ) } – Σ check = n check ( Q 0 ) | Q 0 ∈ { 0 i , 1 i } 1 ≤ i ≤ P ( n ) , Q cont , Q cont \ { s f } , Q pos o 6:24 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 / , losing state q n · · · q j · · · q i · · · q 1 P ( n ) · · · k + 1 k · · · 1 0 1 · · · 0 k · · · 0 P ( n ) . . . . . . . . . 1 1 · · · 1 k · · · 1 P ( n ) Head Positions Control States T ape Symbols Figure 11: T ransitions asso ciated with action a t,k for t = ( q i , q j , 0 , 1 , → ). T o describ e the effect of actions from Σ, w e use the following terminology: a state q ∈ Q is called an α -sink for α ∈ Σ if ∆( q , α ) = { q } , and it is a sink if it is an α -sink for every α . Only the initial start action is nondeterministic: for every α ∈ Σ \ { start } , and every q ∈ Q , ∆( q , α ) is a singleton. A consequence is that in the games A m , the only decision Pla y er 2 makes is in the first step. The t wo distinguished states Acc and / are sinks. Moreov er, an y state but q 0 is a start - sink. F rom the initial state q 0 , the effect of start aims at represen ting the initial configuration of the T uring machine: ∆( q 0 , start ) = { s 0 , p 1 } ∪ { 0 k | x k = 0 or k ≥ n } ∪ { 1 k | x k = 1 } . Then, the actions from Σ trans sim ulate transitions of the T uring machine. Precisely , the effect of action α = (( s s , s t , b r , b w , d ) , i ) ∈ Σ trans is deterministic and as follows: • ∆( s s , α ) = { s t } • ∆( p i , α ) = { p i +1 } if i < P ( n ) and d = → { p i − 1 } if i > 1 and d = ← { p i } otherwise; • ∆(0 i , α ) = ( { 0 i } if b r = 0 and b w = 0 { 1 i } if b r = 0 and b w = 1 ∆(1 i , α ) = ( { 0 i } if b r = 1 and b w = 0 { 1 i } if b r = 1 and b w = 1; • ∆(0 j , α ) = 0 j and ∆(1 j , α ) = 1 j , for j 6 = i ; • otherwise, ∆( q , α ) = / . Last, we describ ed how actions from Σ check let the system evolv e. Let check ( Q 0 ) ∈ Σ check b e a c hec k action for set Q 0 ⊆ Q . Then • ∆( q , check ( Q 0 )) = ( / if q ∈ Q 0 ∪ { q 0 , / } Acc otherwise. W e claim that this construction ensures the follo wing equiv alence: Lemma 6.2. M halts on input x in q f if and only if ( A , A c c ) is a p ositive instanc e of the sur e-synchr onization pr oblem. Pr o of. V ol. 15:3 CONTROLLING A POPULA TION 6:25 • case m ≤ P ( n ) + 1: not enough tokens for pla y er 2 in the first step to cov er all of ∆( q 0 , start ); pla y er 1 wins in the next step by selecting the adequate chec k action • case m ≥ P ( n ) + 2: b est mov e for play er 2 in the first step is to co v er all of ∆( q 0 , start ); afterw ards, if play er 1 do es not mimic the execution of the T uring machine, some tokens get stuck in / ; thus the b est strategy for play er 1 is to mimic the execution of the T uring mac hine; then, the mac hine halts if and only if all the tok ens in Q cont con v erge to s f . No w applying check ( Q cont \ { s f } ) mov es all tokens to Acc . W e th us p erformed a PTIME reduction of the halting problem for p olynomial space T uring machines to the sure sync hronization problem, which is therefore PSP ACE -hard. No w, in order to enco de an alternating T uring machine, w e assume that the con trol states of M alternate b et w een states of Con troller and states of Agen ts. The NF A A is extended with a state , , a state C , which represents that Controller decides what transition to take, and one state q t p er transition t of M , which will represent that Agents chooses to pla y transition t as the next action. Assume first, that C con tains at most an agen t; we will later explain how to imp ose this. The NF A has an additional transition lab elled init from q 0 to C , and one transition from C to every state q t lab eled by a t 0 ,p , for every transition t and action a t 0 ,p . Intuitiv ely , whatev er action a t 0 ,p is pla y ed b y Con troller, Agen ts can c ho ose the next action to b e asso ciated with t by placing the agent to state q t . F rom state q t , only actions of the form a t,p are allo w ed, leading back to C . That is, actions a t 0 ,p with t 0 6 = t lead from q t to the sink losing state / . This enco des that Controller m ust follo w the transition t c hosen b y Agents. T o punish Agents in case the current tap e con ten ts is not the one exp ected b y the transition t = ( s, s 0 , b, b 0 , d ) he chooses, there are c hec king actions check s and check p,b enabled from state q t . Action check s leads from q t to , , and also from s to / . Similarly , check p,b for any p osition p and b ∈ { 0 , 1 } leads from q t to , and from any p osition state q 6 = p to / , and from b p to / . In this wa y , Agen ts will not mo v e the tok en from C to an undesired q t . This ensures that Agents places the agents only in a state q t whic h agrees with the configuration. Last, there are transitions on action end from state , , C and an y of the q t ’s to the target state , . Action end lo ops around the accepting state Acc asso ciated with the T uring mac hine, and it leads from any other state to / . Last, there is an action win , which leads from , to , , from Acc to , , and from any other state to / . This action win ma y seem unnecessary , but its purp ose will app ear clear in the following step. This whole construction enco des, assuming that there is a single agen t in C after the first transition, that Controller can choose the transition from a Controller state of M , and Agents can choose the transition from an Agents state. Let us now explain how to deal with the case where Agen ts places sev eral agents in state C on the initial action init , enabling the p ossibility to later send agen ts to sev eral q t s simultaneously . With the curren t gadget, if there is an agent in q t 1 and one in q t 2 , then Con troller would b e stuck as playing a t 1 ,k w ould send the agent from q t 2 to / , and vice-versa. T o handle this case, consider the gadget from Figure 12. W e use an extra state s , actions store t for each transition t , and action restart . Action store t leads from q t to s , and lo ops on ev ery other state. F rom all states except , and / (in particular, s and every state asso ciated with the T uring machine, including Acc ), action restart leads to q 0 . Last, the effects of end and win are extended as follow to s : end lo ops on s , while win leads from s to / . 6:26 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 Assume that input x is not accepted by the alternating T uring machine M , and let m b e at least P ( n ) + 3. In the m -p opulation game, Agents has a winning strategy placing initially a single agent in state C . If Con troller plays store t (for some t ), either no agen ts are stored, or the unique agent in C is mov ed to s . Playing end do es not c hange the configuration, and Con troller cannot play win . Thus, there is no wa y to lead the agents enco ding the T uring mac hine configuration to , . Pla ying restart mo v es all the agents back to the original configuration q 0 . This shows that store t is useless to Controller and thus Agents wins as in the previous case. Con v ersely , assume that Controller has a strategy in M witnessing the acceptance of x . If Agen ts nev er split, then Controller never plays any store actions and wins as in the previous case. Otherwise, assume that Agen ts places at least t w o agen ts in C to even tually split them to t 1 , . . . , t n . In this case, Controller can pla y the corresp onding actions store t 2 , . . . , store t n mo ving all agents (but the ones in t 1 ) in s , after whic h he pla ys his winning strategy from t 1 resulting in sending at least one agent to , . Then, Con troller plays restart and pro ceeds inductiv ely with strictly less agents from q 0 , until there is no agent in C, q t in which case Con troller plays win to win. Surprisingly , the cut-off can b e as high as doubly exp onen tial in the size of the NF A. Prop osition 6.3. Ther e exists a family of NF A ( A n ) n ∈ N such that |A n | = 2 n + 7 , and for M = 2 2 n +1 + n , ther e is no winning str ate gy in A M n and ther e is one in A M − 1 n . Pr o of. Let n ∈ N . The NF A A n w e build is the disjoint union of two NF As with different prop erties, called A split and A count ,n . On the one hand, for A split , it requires Θ( log m ) steps for Controller to win the m -p opulation game. On the other hand, A count ,n implemen ts a usual counter ov er n bits, such that Controller can a v oid losing for O (2 n ) steps. In the com bined NF A A n , we require that Controller win in A split and av oid losing in A count ,n . This ensures that A n has a cutoff of Θ(2 2 n ) Recall Figure 1, which presen ts the splitting gadget A split . It has the following properties. In A m split with m ∈ N agents: q 0 C q t s , / win win win win init a t 0 ,p a t,p restart restart end end restart restart store t store t 0 win a t,p , end Figure 12: Gadget simulating a single agent in C . V ol. 15:3 CONTROLLING A POPULA TION 6:27 ( s 1) Con troller has a strategy to ensure win in 2 b log 2 m c + 2 steps: Consider the fol- lo wing strategy of Con troller. • Pla y δ if there is at least one agent in state q 0 . Otherwise, • Pla y a if the num b er of agents in q 1 is greater than in q 2 . • Pla y b if the num b er of agents in q 2 is greater than or same as in q 1 . F or this strategy , let us lo ok at the num b er of agen ts in the state q 0 and f resp ectiv ely . F or instance, since the play starts from all agents in q 0 , the starting state has count ( m, 0) - there are m tok ens in q 0 and 0 in f . F rom a state with counts ( k , m − k ), after t w o steps of this strategy (regardless of Agents’s play), w e will end up in a state with coun ts ( l, m − l ) for some l ≤ b k / 2 c . Hence within 2 × b log 2 m c + 2 steps starting from the initial state, one will reac h a state with counts (0 , m ) and the Controller wins. ( s 2) No strategy of Con troller can ensure a win in less than 2 b log 2 m c + 2 steps: The transition from q 0 on δ is the only real choice Agen ts has to make. Assume that Agen ts decides to send an equal n um b er of agen ts (up to a difference of 1) to b oth q 1 and q 2 from q 0 . Against this strategy of Agents, let α 1 , α 2 , . . . α k b e the shortest sequence of actions by Controller which lead all the agents into f . W e no w show that k ≥ 2 × b log 2 m c + 2. Initially all agen ts are in q 0 . So b y the minimalit y of k w e should hav e α 1 = δ, α 2 ∈ { a, b } , α 3 = δ, . . . α k ∈ { a, b } , since other actions will not change the state of the agen ts. F or any i ∈ { 1 , 2 , . . . k 2 } , after Con troller pla ys α 2 i , denote the num b er of agen ts in q 0 and f b y ( l i , m − l i ). Note l i ≥ l i − 1 − 1 2 , since Agents sends equal n um b er of agent s from q 0 to q 1 and q 2 . Iterating this equation for an y j ∈ { 1 , 2 , . . . k 2 } giv es l j ≥ l 0 +1 2 j − 1, where l 0 = m is the n um b er of agents in state q 0 at the b eginning. In particular this shows that k 2 > log m since l k 2 = 0. Hence k ≥ 2 × ( b log 2 m c + 1). The gadget A count ,n , sho wn in Figure 13, represents a binary counter. F or each i ∈ { 1 . . . n } , it has states ` i (meaning bit i is 0) and h i (meaning bit i is 1) and actions α i (whic h sets the i th bit and resets the bits for j < i ). The only real c hoice that Agen ts has in this gadget is at the first step, and it is optimal for Agen ts to place agen ts in as many states as p ossible – in particular when m ≥ n , placing one agent in each l i for i ∈ { 1 . . . n } . After this, the play is completely determined b y Con troller’s actions. Actually , Controller do esn’t hav e muc h choice when there is at least one agent is eac h l i . Con troller m ust simulate an n -bit counter if it wan ts to preven t some agen t from reaching / . More precisely , assume inductiv ely that all the agents are in the states given by b n b n − 1 . . . b 1 where b k ∈ { l k , h k } (initially b i = l i for each i ). If b i = h i for each i , then any action α i will lead the agent in state h i to / . Otherwise, let j b e the smallest index such that b j = l j . Observe that α j is the only action that do esn’t lead some agent to / ; α i for i < j w ould lead the agent in h i to / , while α i for i > j w ould lead the agent in l j to / . On pla ying α j , the agents no w mov e to the states b n b n − 1 . . . b j − 1 h j l j − 1 . . . l 0 – which can b e in terpreted as the next num ber in a binary counter. This means that the gadget A count ,n has the following prop erties: ( c 1) F or any m , Controller has a strategy in the m -p opulation game on A count ,n to av oid / for 2 n steps by playing α i whenev er the counter suffix from bit i is 01 · · · 1; ( c 2) F or m ≥ n , no strategy of Controller in A m count ,n can av oid / for more than 2 n steps. T o construct A n , the tw o gadgets A split and A count ,n are combined by adding a new initial state, and an action lab eled init leading from this new initial state to the initial 6:28 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 q 0 l i l 1 l n h i h n h 1 · · · · · · / α i α i { α j } j >i { α j } j >i { α j } j 1 { α j } j 1 Figure 13: The counting gadget A count ,n . states of b oth NF As. Actions for A n are made up of pairs of actions, one for each gadget: { a, b, δ } × { α i | 1 ≤ i ≤ n } . W e further add an action ∗ whic h can b e pla y ed from an y state of A count ,n except / , and only from f in A split , leading to the global target state , . Let M = 2 2 n +1 + n . W e deduce that the cut-off is M − 1 as follows: • F or M agen ts, a winning strategy for Agents is to first split n tok ens from the initial state to the q 0 of A count ,n , in order to fill each l i with 1 tok en, and 2 2 n +1 tok ens to the q 0 of A split . Then Agents splits evenly tokens b etw een q 1 , q 2 in A split . In this wa y , Controller needs at least 2 n + 1 steps to reach the final state of A split ( s 2), but Con troller reaches / after these 2 n + 1 steps in A count ,n ( c 2). • F or M − 1 agents, Agents needs to use at least n tok ens from the initial state to the q 0 of A count ,n , else Controller can win easily . But then there are less than 2 2 n +1 tok ens in the q 0 of A split . And thus by ( s 1), Controller can reach f within 2 n steps, after which he still a v oids / in A count ,n ( c 1). And then Controller sends all agents to , using ∗ . Th us, the family ( A n ) of NF A exhibits a doubly exp onential cut-off. V ol. 15:3 CONTROLLING A POPULA TION 6:29 7. Discussion Obtaining an EXPTIME algorithm for the control problem of a p opulation of agen ts was c hallenging. W e also managed to pro v e a matching lo w er-b ound. F urther, the surprising doubly exp onential matc hing upp er and lo wer bounds on the cut-off imply that the alternativ e tec hnique, chec king that Con troller wins all m -p opulation game for m up to the cut-off, is far from b eing efficien t. The idealised formalism we describ e in this pap er is not entirely satisfactory: for instance, while eac h agent can mov e in a non-deterministic wa y , unrealistic b ehaviours can happ en, e.g. all agents synchronously taking infinitely often the same choice. An almost-sure con trol problem in a probabilistic formalism should b e studied, ruling out suc h extreme b eha viours. As the p opulation is discrete, we may av oid the undecidabilit y that holds for distributions [ 11 ] and is inherited from the equiv alence with probabilistic automata [ 17 ]. Abstracting con tin uous distributions by a discrete p opulation of arbitrary size could thus b e seen as an approximation technique for undecidable formalisms suc h as probabilistic automata. Ac kno wledgement: W e are grateful to Gregory Batt for fruitful discussions concerning the biological setting. Thanks to Mahsa Shirmohammadi for interesting discussions. This w ork w as partially supp orted by ANR pro ject STOCH-MC (ANR-13-BS02-0011-01), and by DST/CEFIPRA/Inria Asso ciated team EQUA VE. References [1] P arosh Ab dulla, Giorgio Delzanno, Othmane Rezine, Arnaud Sangnier, and Riccardo T rav erso. On the v erification of timed ad ho c net w orks. In Pro c e e dings of F ormats’11 , volume 6919 of L e ctur e Notes in Computer Scienc e , pages 256–270. Springer, 2011. [2] P arosh Ab dulla and Bengt Jonsson. Mo del chec king of systems with many identical timed processes. The or etic al Computer Scienc e , 290(1):241–263, 2003. [3] S. Akshay , Blaise Genest, Bruno Karelo vic, and Nikhil Vyas. On regularity of unary probabilistic automata. In Pr o c e e dings of ST ACS’16 , volume 47 of L eibniz International Pr o c e e dings in Informatics , pages 8:1–8:14. Leibniz-Zen trum f ¨ ur Informatik, 2016. [4] Dana Angluin, James Aspnes, Zo¨ e Diamadi, Michael J. Fischer, and Ren´ e Peralta. Computation in net works of passively mobile finite-state sensors. In Pr o c e e dings of PODC’04 , pages 290–299. ACM, 2004. [5] Andr ´ e Arnold, Aymeric Vincen t, and Igor W alukiewicz. Games for syn thesis of con trollers with partial observ ation. The or etic al Computer Scienc e , 1(303):7–34, 2003. [6] Nathalie Bertrand and P aulin F ournier. P arameterized verification of many identical probabilistic timed pro cesses. In Pr o c ee dings of FSTTCS’13 , v olume 24 of L eibniz International Pr o c e e dings in Informatics , pages 501–513. Leibniz-Zen trum f ¨ ur Informatik, 2013. [7] Nathalie Bertrand, P aulin F ournier, and Arnaud Sangnier. Playing with probabilities in reconfigurable broadcast netw orks. In Pr o c e e dings of F oSSaCS’14 , v olume 8412 of L e ctur e Notes in Computer Scienc e , pages 134–148. Springer, 2014. [8] Mic hael Blondin, Ja vier Esparza, and Anton ´ ın Kucera. Automatic analysis of exp ected termination time for p opulation proto cols. In Pr o c e e dings of CONCUR’18 , pages 33:1–33:16, 2018. [9] T om´ as Br´ azdil, Petr Janˇ car, and Anton ´ ın Kuˇ cera. Reachabilit y games on extended vector addition systems with states. In Pr o ce e dings of ICALP’10 , volume 6199 of L e ctur e Notes in Computer Scienc e , pages 478–489. Springer, 2010. [10] Cristian S. Calude, Sanjay Jain, Bakhadyr Khoussaino v, W ei Li, and F rank Stephan. Deciding parity games in quasip olynomial time. In Pr o c e e dings of STOCS’17 , pages 252–263. ACM, 2017. [11] Lauren t Doy en, Thierry Massart, and Mahsa Shirmohammadi. Infinite synchronizing words for proba- bilistic automata (erratum). T echnical rep ort, CoRR abs/1206.0995, 2012. 6:30 N. Ber trand, M. Dew askar, B. Genest, H. Gimber t, and A.A. Godbole V ol. 15:3 [12] Lauren t Doy en, Thierry Massart, and Mahsa Shirmohammadi. Limit synchronization in Mark ov decision pro cesses. In Pr oc e e dings of F oSSaCS’14 , volume 8412 of L e ctur e Notes in Computer Scienc e , pages 58–72. Springer, 2014. [13] Ja vier Esparza. Keeping a crowd safe: On the complexity of parameterized verification (invited talk). In Pr o c e e dings of ST ACS’14 , volume 25 of L eibniz International Pr o c e e dings in Informatics , pages 1–10. Leibniz-Zen trum f ¨ ur Informatik, 2014. [14] Ja vier Esparza, Alain Finkel, and Ric hard Ma yr. On the verification of broadcast protocols. In Pr o c e e dings of LICS’99 , pages 352–359. IEEE Computer So ciety , 1999. [15] Ja vier Esparza, Pierre Gant y , J´ erˆ ome Leroux, and Rupak Ma jumdar. V erification of p opulation protocols. A cta Inf. , 54(2):191–215, 2017. [16] Stev en M. German and A. Prasad Sistla. Reasoning ab out systems with many pro cesses. J. ACM , 39(3):675–735, 1992. [17] Hugo Gimbert and Y oussouf Oualhadj. Probabilistic automata on finite w ords: Decidable and undecidable problems. In Pr oc ee dings of ICALP’10 , volume 6199 of L e ctur e Notes in Computer Science , pages 527–538. Springer, 2010. [18] Marcin Jurdzinski. Small progress measures for solving parity games. In Pr oc e e dings of ST ACS’00 , v olume 1770 of Le cture Notes in Computer Scienc e , pages 290–301. Springer, 2000. [19] Marcin Jurdzi ´ nski, Ranko Lazi´ c, and Sylv ain Sc hmitz. Fixed-dimensional energy games are in pseudo p olynomial time. In Pr o c e e dings of ICALP’15 , v olume 9135 of L e ctur e Notes in Computer Scienc e , pages 260–272. Springer, 2015. [20] P anagiotis Kouv aros and Alessio Lomuscio. Parameterised Model Chec king for Alternating-Time T emp o- ral Logic. In Pr o c e e dings of ECAI’16 , volume 285 of F r ontiers in Artificial Intel ligenc e and Applic ations , pages 1230–1238. IOS Press, 2016. [21] P av el Martyugin. Computational complexit y of certain problems related to carefully synchronizing words for partial automata and directing w ords for nondeterministic automata. The ory of Computing Systems , 54(2):293–304, 2014. [22] Mahsa Shirmohammadi. Qualitative analysis of synchr onizing pr ob abilistic systems. PhD thesis, ULB, 2014. [23] Jannis Uhlendorf, Agn ` es Miermont, Thierry Dela v eau, Gilles Charvin, F ran¸ cois F ages, Sam uel Bottani, P ascal Hersen, and Gregory Batt. In silico control of biomolecular pro cesses. In Computational Metho ds in Synthetic Biolo gy , chapter 13, pages 277–285. Humana Press, Springer, 2015. [24] Mikhail V. V olko v. Synchronizing automata and the ˇ Cern´ y conjecture. In Pr o c e e dings of LA T A’08 , v olume 5196 of Le cture Notes in Computer Scienc e , pages 11–27. Springer, 2008. [25] Wiesla w Zielonk a. Infinite games on finitely coloured graphs with applications to automata on infinite trees. Theor. Comput. Sci. , 200(1-2):135–183, 1998. URL: https://doi.org/10.1016/S0304- 3975(98) 00009- 7 , doi:10.1016/S0304- 3975(98)00009- 7 . This work is licensed under the Creative Commons Attribution License. T o view a copy of this license, visit https://creativecommons.org/licenses/by/4.0/ or send a letter to Creative Commons, 171 Second St, Suite 300, San Fr ancisco , CA 94105, USA, or Eisenacher Strasse 2, 10777 Berlin, Germany
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment