Evacuating Robots from a Disk Using Face-to-Face Communication
Assume that two robots are located at the centre of a unit disk. Their goal is to evacuate from the disk through an exit at an unknown location on the boundary of the disk. At any time the robots can move anywhere they choose on the disk, independently of each other, with maximum speed $1$. The robots can cooperate by exchanging information whenever they meet. We study algorithms for the two robots to minimize the evacuation time: the time when both robots reach the exit. In [CGGKMP14] the authors gave an algorithm defining trajectories for the two robots yielding evacuation time at most $5.740$ and also proved that any algorithm has evacuation time at least $3+ \frac{\pi}{4} + \sqrt{2} \approx 5.199$. We improve both the upper and lower bound on the evacuation time of a unit disk. Namely, we present a new non-trivial algorithm whose evacuation time is at most $5.628$ and show that any algorithm has evacuation time at least $3+ \frac{\pi}{6} + \sqrt{3} \approx 5.255$. To achieve the upper bound, we designed an algorithm which proposes a forced meeting between the two robots, even if the exit has not been found by either of them. We also show that such a strategy is provably optimal for a related problem of searching for an exit placed at the vertices of a regular hexagon.
💡 Research Summary
The paper studies the classic evacuation problem in a geometric setting: two autonomous robots start from the centre of a unit disk and must both reach an unknown exit located somewhere on the boundary. Robots move with maximum speed 1, can travel anywhere inside the disk, but can only exchange information when they occupy the same point at the same time (the face‑to‑face communication model). The objective is to minimise the worst‑case evacuation time, i.e., the time until the last robot reaches the exit, assuming an adversarial placement of the exit.
Prior work. In the seminal work of Czyzowicz et al. (2014) two algorithms were presented. In the wireless model (unrestricted communication) the optimal evacuation time is 1 + 2π/3 + √3 ≈ 4.826. In the face‑to‑face model the best known algorithm (referred to as Algorithm A) achieved a worst‑case time of 5.740, while a universal lower bound of 3 + π/4 + √2 ≈ 5.199 was proved. Subsequent papers (Brandt et al. 2017, Disser & Schmitt 2019) slightly improved the upper bound (down to 5.6234) but the lower bound remained unchanged.
Contribution of this paper. The authors close the gap considerably by (i) presenting a new deterministic algorithm whose worst‑case evacuation time does not exceed 5.628, and (ii) proving a stronger lower bound of 3 + π/6 + √3 ≈ 5.255. The improvement on the upper bound stems from a novel “forced meeting” strategy: even if neither robot has yet discovered the exit, they are made to meet deliberately at a carefully chosen interior point. The lower bound is obtained by first solving a related problem—evacuation from a regular hexagon where the exit is placed at an unknown vertex. The optimal strategy for the hexagon also uses a forced meeting, and this optimality transfers to the disk problem, yielding the new adversarial construction.
Algorithmic ideas.
-
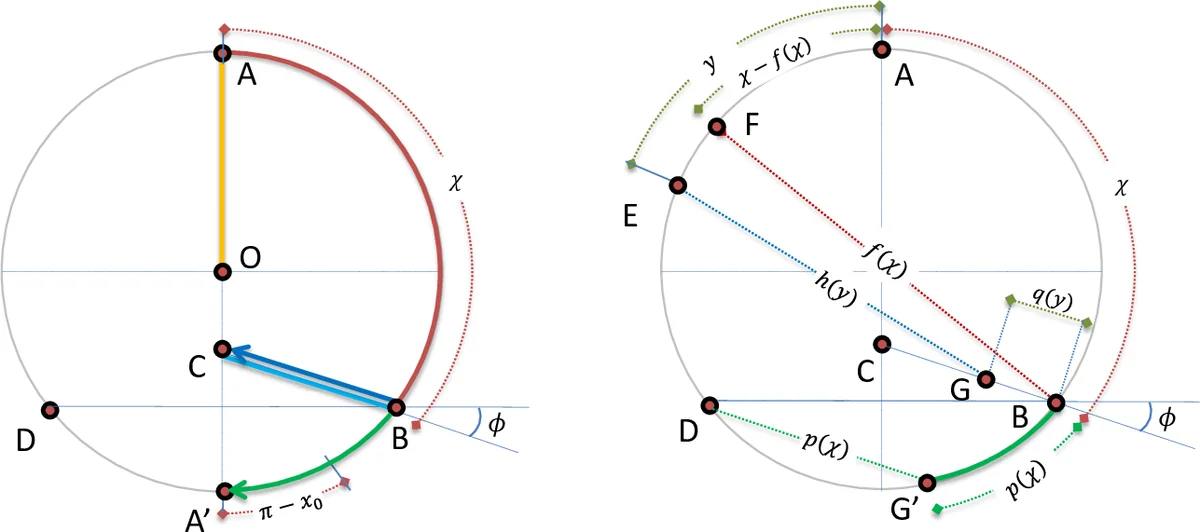
Algorithm A (baseline). Both robots move together from the centre to an arbitrary boundary point A. Robot R₂ then walks clockwise along the circumference for an arc of length x, while R₁ walks counter‑clockwise on the reflected path. When R₁ finds the exit at E, it follows a straight segment to a meeting point M on the circle, satisfying |EM| = t where t is the additional time needed for R₂ to reach M. The total time is 1 + x + f(x), where f(x) solves z = 2 sin((x − z)/2). The function F(x)=x+f(x) attains its maximum at x₀≈2.85344, giving the 5.740 bound.
-
Algorithm B(χ, φ). To improve upon A, the authors introduce a detour for R₂ before it reaches the critical point x₀. After traversing an arc of length χ (π/2 ≤ χ ≤ x₀), R₂ leaves the boundary and moves straight toward the line through the centre and the antipodal point A₀, forming an angle φ with the line BD (where D is the reflection of B across AA₀). It reaches the line at point C, turns back, and returns to B. This “linear detour” forces a meeting with R₁ earlier than in A. The parameters χ and φ are optimised (numerically χ≈2.68, φ≈0.13) to minimise the worst‑case value of 1 + max{χ + detour‑time + post‑detour‑time, …}, yielding an evacuation time ≤ 5.644.
-
Algorithm C (multiple detours). By allowing several such detours (each with its own χᵢ, φᵢ) the authors further reduce the worst‑case time to 5.628. The analysis remains geometric: each detour shortens the remaining arc that R₁ must explore before the meeting, while the total extra distance spent inside the disk is carefully bounded.
Lower bound technique. The authors first analyse the hexagon problem. They prove that any optimal evacuation strategy must include a forced meeting after visiting a subset of vertices; otherwise the adversary can place the exit at the last unvisited vertex and force a larger time. The optimal evacuation time for the hexagon is exactly 3 + π/6 + √3. By embedding the hexagon into the unit disk (placing its vertices on the circumference) and using the same forced‑meeting argument, they construct a worst‑case placement of the exit on the disk that forces any algorithm to incur at least the same time, establishing the lower bound 5.255.
Implications and future work. The forced‑meeting concept is counter‑intuitive because it deliberately sacrifices immediate exploration for a guaranteed rendezvous. Yet it proves beneficial in the face‑to‑face model where information cannot be transmitted remotely. The paper shows that such a strategy is not only useful but optimal for the hexagon, and it yields the best known bounds for the disk problem. Open questions include: can the upper bound be further reduced without forced meetings? How does the approach extend to more than two robots, multiple exits, or different speed constraints? The techniques introduced here—geometric optimisation of detours and adversarial lower‑bound constructions via polygonal sub‑problems—provide a solid foundation for tackling these extensions.
Comments & Academic Discussion
Loading comments...
Leave a Comment