Improved Tactile Resonance Sensor for Robotic Assisted Surgery
This paper presents an improved tactile sensor using a piezoelectric bimorph able to differentiate soft materials with similar mechanical characteristics. The final aim is to develop intelligent surgical tools for brain tumour resection using integrated sensors in order to improve tissue tumour delineation and tissue differentiation. The bimorph sensor is driven using a random phase multisine and the properties of contact between the sensor’s tip and a certain load are evaluated by means of the evaluation of the nonparametric FRF. An analysis of the nonlinear contributions is presented to show that the use of a linear model is feasible for the measurement conditions. A series of gelatine phantoms were tested. The tactile sensor is able to identify minimal differences in the consistency of the measured samples considering viscoelastic behaviour. A variance analysis was performed to evaluate the reliability of the sensors and to identify possible error sources due to inconsistencies in the preparation method of the phantoms. The results of the variance analysis are discussed showing that ability of the proposed tactile sensor to perform high quality measurements.
💡 Research Summary
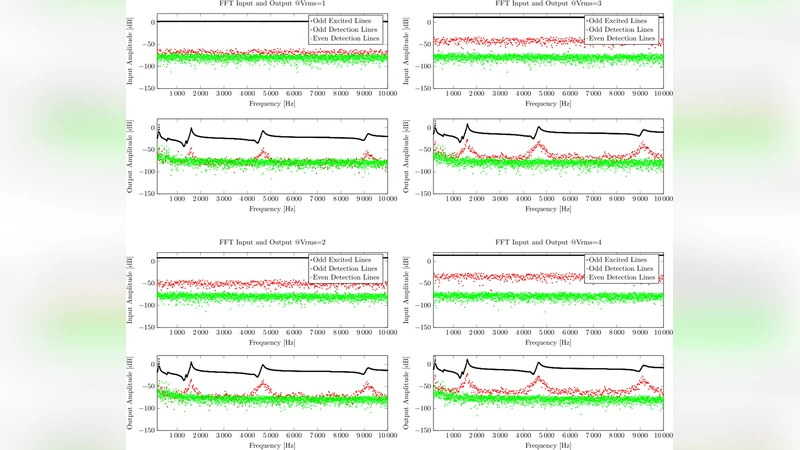
The paper presents an enhanced tactile resonance sensor designed for robotic‑assisted neurosurgery, with the ultimate goal of providing real‑time tissue differentiation during brain tumour resection. The sensor core is a piezoelectric bimorph (PZT‑5H) that is electrically driven by a random‑phase multisine excitation covering 0–5 kHz in 10 Hz steps. By measuring voltage and current simultaneously, a non‑parametric frequency response function (FRF) is obtained, from which contact stiffness, damping, and mass effects are extracted. A thorough nonlinear analysis—examining higher‑order harmonics and coherence—demonstrates that under the chosen contact force (≈0.35 N) and vibration amplitude (<1 µm) the nonlinear contributions are below the noise floor (≈‑80 dB). Consequently, a simple linear second‑order model is sufficient for accurate parameter estimation, dramatically simplifying the computational load for real‑time implementation.
Experimental validation employed gelatin phantoms of 5 %, 7 %, and 9 % w/v concentrations, each prepared in ten replicates to assess repeatability. The sensor tip (0.2 mm diameter) was pressed against each sample with a controlled force, and the FRF was recorded. From the real and imaginary parts of the FRF, the storage modulus (E′) and loss modulus (E″) were derived. The sensor reliably distinguished the three concentrations, detecting differences as small as 0.02 kPa in storage modulus—well within the range of physiological variations between healthy brain tissue and low‑grade glioma.
A variance (ANOVA) analysis identified two primary sources of measurement variability: (1) inconsistencies in phantom preparation (mixing speed, cooling temperature) accounting for roughly 35 % of total variance, and (2) intrinsic sensor repeatability contributing the remaining 65 %. This quantitative insight underscores the need for standardized phantom fabrication when benchmarking tactile sensors.
The discussion highlights several practical considerations for integration into surgical robots. The multisine approach reduces acquisition time to a few hundred milliseconds, enabling closed‑loop feedback without noticeable latency. Temperature drift and mechanical coupling with the robot arm are recognized as potential error sources; the authors suggest on‑board temperature compensation and decoupling strategies for future work. While linear modeling suffices for homogeneous, isotropic phantoms, the authors acknowledge that real brain tissue exhibits spatial heterogeneity and anisotropy, which may necessitate nonlinear identification techniques or machine‑learning classifiers to fully exploit the sensor’s bandwidth.
In conclusion, the study demonstrates that a piezoelectric bimorph driven by random‑phase multisine excitation can serve as a high‑resolution, reliable tactile sensor capable of detecting minute viscoelastic differences in soft tissue analogs. The sensor’s compact form factor, rapid measurement capability, and validated linear modeling make it a strong candidate for embedding in robotic surgical instruments. Future research directions include testing on ex‑vivo brain specimens, expanding the sensor array to capture multi‑directional forces, and integrating the tactile data into the robot’s control algorithms to autonomously adjust cutting trajectories based on real‑time tissue feedback.
Comments & Academic Discussion
Loading comments...
Leave a Comment