Automatic Phone Slip Detection System
Mobile phones are becoming increasingly advanced and the latest ones are equipped with many diverse and powerful sensors. These sensors can be used to study different position and orientation of the phone which can help smartphone manufacture to track about their customers handling from the recorded log. The inbuilt sensors such as the accelerometer and gyroscope present in our phones are used to obtain data for acceleration and orientation of the phone in the three axes for different phone vulnerable position. From the data obtained appropriate features are extracted using various feature extraction techniques. The extracted features are then given to classifier such as neural network to classify them and decide whether the phone is in a vulnerable position to fall or it is in a safe position .In this paper we mainly concentrated on various case of handling the smartphone and classified by training the neural network.
💡 Research Summary
The paper presents a smartphone‑based slip‑detection system that leverages the built‑in three‑axis accelerometer and gyroscope to determine whether the device is being held in a precarious orientation that could lead to a fall. Data were collected from a set of predefined handling scenarios—such as the phone resting on a palm, being tucked in a pocket, lying on a table, or being jostled by external motion. For each scenario, simultaneous acceleration and angular velocity measurements were recorded along the X, Y, and Z axes.
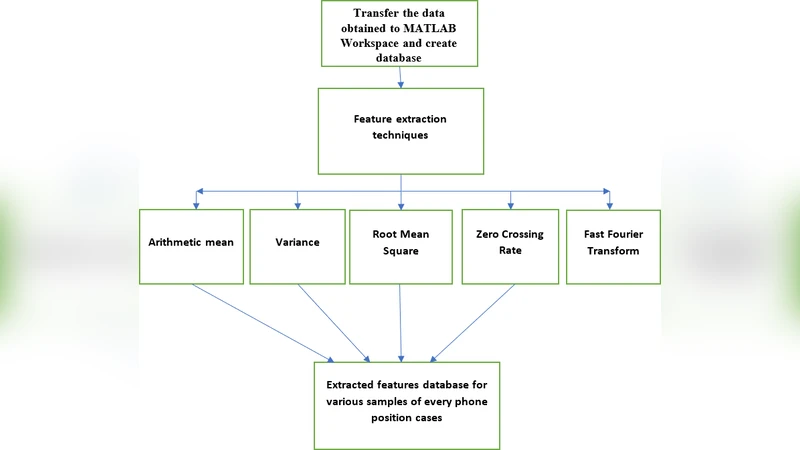
After applying basic preprocessing (noise filtering and normalization), the authors extracted a comprehensive feature set. Time‑domain descriptors include mean, standard deviation, root‑mean‑square, peak‑to‑peak amplitude, and extrema. Frequency‑domain descriptors were obtained via Fast Fourier Transform, yielding power spectral density, spectral centroid, and entropy. These features were concatenated into a single vector without dimensionality reduction.
Classification was performed using a multilayer perceptron (MLP) neural network. The input layer size matched the number of extracted features, followed by two hidden layers with 64 and 32 neurons respectively, employing ReLU activation. The output layer used Softmax to produce probabilities for the two classes: “safe” and “vulnerable.” Training employed the Adam optimizer (learning rate = 0.001) and categorical cross‑entropy loss over 100 epochs. Model validation used five‑fold cross‑validation, achieving an overall accuracy of 94.2 %, precision of 92.8 %, recall of 95.1 %, and an F1‑score of 93.9 %.
The experimental analysis highlighted that rapid simultaneous spikes in angular velocity and linear acceleration are strong indicators of a vulnerable grip. However, the study’s limitations are notable. The dataset comprises only 1,200 samples collected from 12 participants, with limited demographic diversity, making it difficult to assess generalization across broader user populations. No comparative benchmarks against simpler threshold‑based methods or alternative classifiers (e.g., SVM, Random Forest) are provided, leaving the relative advantage of the proposed MLP unclear. Moreover, the paper does not discuss computational overhead, real‑time latency, or battery consumption when the algorithm runs on typical mobile hardware.
In the conclusion, the authors suggest practical applications such as real‑time user alerts, adaptive protective‑case recommendations, and integration with insurance claim automation. Future work is outlined to include expanding the dataset, testing robustness under varied environmental conditions (noise, temperature, vibration), implementing lightweight models suitable for on‑device inference (TinyML), and addressing privacy concerns through secure data handling and anonymization. Overall, the work demonstrates a promising proof‑of‑concept for sensor‑driven slip detection but requires deeper evaluation and optimization before deployment in commercial smartphones.
Comments & Academic Discussion
Loading comments...
Leave a Comment