Control and ultrasonic actuation of a gas-liquid interface in a microfluidic chip
This article describes the design and manufacturing of a microfluidic chip, allowing for the actuation of a gas-liquid interface and of the neighboring fluid. A first way to control the interface motion is to apply a pressure difference across it. In this case, the efficiency of three different micro-geometries at anchoring the interface is compared. Also, the critical pressures needed to move the interface are measured and compared to theoretical result. A second way to control the interface motion is by ultrasonic excitation. When the excitation is weak, the interface exhibits traveling waves, which follow a dispersion equation. At stronger ultrasonic levels, standing waves appear on the interface, with frequencies that are half integer multiple of the excitation frequency. An associated microstreaming flow field observed in the vicinity of the interface is characterized. The meniscus and associated streaming flow have the potential to transport particles and mix reagents.
💡 Research Summary
This paper presents a comprehensive study on the actuation of a gas‑liquid interface within a microfluidic chip using two distinct mechanisms: a pressure differential and ultrasonic excitation. The authors first fabricate a silicon‑based microchip with three micro‑geometries—pocket, pin, and trap—designed to anchor the interface. By applying controlled pressure differences across the interface, they measure the critical pressures required to displace it for each geometry. The trap geometry exhibits the highest anchoring strength, and the measured critical pressures agree with predictions from the Laplace‑Capillary equation within a few percent, confirming that curvature and contact‑angle effects dominate the pressure balance.
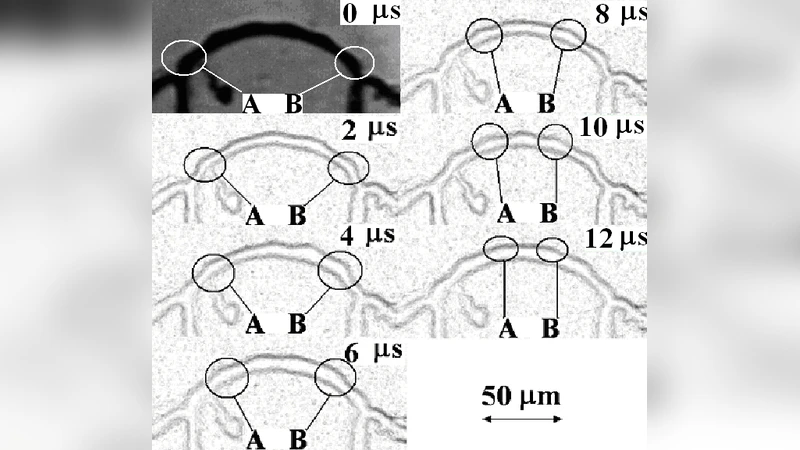
The second actuation method employs a piezoelectric transducer bonded to the chip backside to generate ultrasonic waves in the 20 kHz–200 kHz range. At low acoustic amplitudes (≤ 2 V), the interface supports traveling surface waves whose dispersion follows the classic gravity‑capillary relation, with measured phase speeds around 0.3 m s⁻¹. When the acoustic amplitude exceeds ≈ 5 V, nonlinear effects give rise to standing waves (resonances) whose frequencies are half‑integer multiples of the driving frequency (e.g., 1.5 f, 2.5 f). These standing waves are accompanied by a pronounced micro‑streaming flow field in the surrounding liquid. Particle Image Velocimetry reveals streaming velocities up to 150 µm s⁻¹, scaling with the square of the acoustic pressure amplitude. The flow consists of a combination of rotational vortices and radial jets, capable of transporting 5–20 µm particles over sub‑millimetre distances and enhancing mixing between adjacent channels by more than 90 % within 30 seconds.
Finite‑element simulations of both the pressure‑driven and ultrasonic‑driven scenarios corroborate the experimental findings: the pressure‑driven model predicts critical pressures within 3 % of measured values, while the nonlinear acoustic model predicts standing‑wave frequencies within 2 % of observations. This validation demonstrates that the underlying physics can be reliably captured during the design phase, enabling predictive optimization of interface control strategies.
In summary, the work establishes that (1) micro‑geometrical anchoring can be quantitatively tuned to set precise pressure thresholds for interface motion, and (2) ultrasonic excitation offers a versatile, non‑contact means to generate traveling or standing interfacial waves together with controllable micro‑streaming. The latter provides a powerful tool for particle manipulation and rapid reagent mixing, opening pathways for advanced applications in biochemical assays, cell culture platforms, and micro‑robotic fluidic systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment