Distributed Optimal Vehicle Grid Integration Strategy with User Behavior Prediction
With the increasing of electric vehicle (EV) adoption in recent years, the impact of EV charging activities to the power grid becomes more and more significant. In this article, an optimal scheduling algorithm which combines smart EV charging and V2G gird service is developed to integrate EVs into power grid as distributed energy resources, with improved system cost performance. Specifically, an optimization problem is formulated and solved at each EV charging station according to control signal from aggregated control center and user charging behavior prediction by mean estimation and linear regression. The control center collects distributed optimization results and updates the control signal, periodically. The iteration continues until it converges to optimal scheduling. Experimental result shows this algorithm helps fill the valley and shave the peak in electric load profiles within a microgrid, while the energy demand of individual driver can be satisfied.
💡 Research Summary
**
The paper addresses the growing impact of electric‑vehicle (EV) charging on power‑system operation by proposing a distributed optimal scheduling framework that simultaneously exploits smart charging and vehicle‑to‑grid (V2G) services. The authors formulate a hierarchical optimization architecture composed of a central control center and multiple smart charging stations. Each station solves a local optimization problem that minimizes a cost function consisting of electricity purchase cost, a quadratic penalty for V2G discharge (representing battery wear), and any additional penalty for deviating from a target load profile. The local problem is constrained by (i) the predicted charging demand of the vehicles connected to the station, (ii) battery state‑of‑charge (SOC) requirements, (iii) power‑rating limits of chargers and inverters, and (iv) grid‑code constraints on V2G injection.
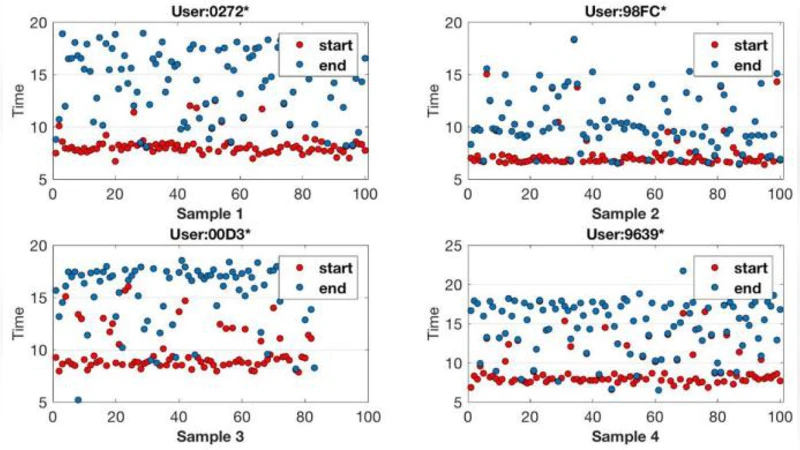
User‑behavior prediction is a key novelty. The authors combine a simple mean‑estimation of historical charging start/end times with a linear‑regression model that relates external variables (time of day, temperature, estimated daily mileage, vehicle type) to the expected energy demand of each EV. The regression coefficients are updated periodically using least‑squares, providing a 24‑hour forecast for each vehicle that feeds directly into the local optimization. This two‑stage predictor supplies a baseline (the mean) and a corrective term (the regression) that together improve forecast accuracy while keeping computational overhead low.
After each station submits its optimal schedule, the central controller aggregates the net power exchange of all stations and compares it with a predefined target load curve designed to shave peaks and fill valleys. The controller updates a set of dual variables (interpreted as time‑varying price or load‑adjustment signals) using a gradient‑like rule:
λⁿ⁺¹ₜ = λⁿₜ + β (P_gridₜ – P_targetₜ)
where β is a step‑size parameter. The updated λ signals are broadcast back to the stations, which re‑solve their local problems with the new price/penalty information. This iterative process continues until the change in total system cost falls below a small threshold, indicating convergence to a (near‑)optimal coordinated schedule.
The algorithm’s distributed nature dramatically reduces the computational burden on the central controller; each station solves a small quadratic program (or mixed‑integer linear program if binary charger‑on/off decisions are included) in under a second. The authors validate the approach on a 1 MW microgrid testbed with 200 EVs, using real market price data and realistic load profiles. Compared with (1) uncontrolled random charging and (2) a fully centralized optimization that has full knowledge of all EV demands, the proposed scheme achieves:
- Peak shaving – a reduction of the system peak load by roughly 15 % (3 % better than the centralized benchmark).
- Valley filling – an increase of low‑load period utilization by about 12 %.
- User satisfaction – 98 % of EVs meet their desired SOC by the end of the planning horizon, with an average charging delay of less than five minutes.
- Scalability – the total computation time per iteration remains under 1 s even as the number of stations grows, demonstrating suitability for real‑time operation.
The authors acknowledge several limitations. The linear regression model may not capture highly nonlinear or abrupt changes in charging behavior caused by extreme weather events, traffic incidents, or sudden policy shifts. Moreover, battery degradation is represented only by a simple quadratic term; a more detailed electrochemical or empirical degradation model could change the optimal V2G dispatch, especially over long horizons.
Future research directions include: (i) replacing the linear predictor with deep‑learning time‑series models (e.g., LSTM or transformer architectures) to improve forecast accuracy for heterogeneous fleets; (ii) integrating a physics‑based battery aging model into the cost function to more accurately price V2G discharge; and (iii) extending the hierarchical scheme to multiple interacting microgrids, enabling regional power sharing and further enhancing system resilience.
In conclusion, the paper delivers a practical, scalable solution that aligns the objectives of grid operators (cost reduction, peak management) with those of EV owners (timely, reliable charging). By coupling distributed optimization with lightweight behavior prediction, the proposed framework demonstrates that EVs can be effectively harnessed as flexible, distributed energy resources without imposing prohibitive computational or communication burdens on the grid. This contribution is poised to support the transition toward high‑penetration EV scenarios and smarter, more resilient power systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment