A Brownian Dynamics Model of Kinesin in Three Dimensions Incorporating the Force-Extension Profile of the Coiled-Coil Cargo Tether
The Kinesin family of motor proteins are involved in a variety of cellular processes that transport materials and generate force. With recent advances in experimental techniques, such as optical tweezers which can probe individual molecules, there has been an increasing interest in understanding the mechanisms by which motor proteins convert chemical energy into mechanical work. Here we present a mathematical model for the chemistry and three dimensional mechanics of the Kinesin motor protein which captures many of the force dependent features of the motor. For the elasticity of the tether that attaches cargo to the motor we develop a method for deriving the non-linear force-extension relationship from optical trap data. For the Kinesin heads, cargo, and microscope stage we formulate a three dimensional Brownian Dynamics model that takes into account excluded volume interactions. To efficiently compute statistics from the model an algorithm is proposed that uses a two step protocol that separates the simulation of the mechanical features of the model from the chemical kinetics of the model. Using this approach for a bead transported by the motor, the force dependent average velocity and randomness parameter are computed and compared with the experimental data.
💡 Research Summary
The paper presents a comprehensive three‑dimensional Brownian dynamics model of the kinesin motor that explicitly incorporates the experimentally measured non‑linear force‑extension behavior of the coiled‑coil cargo tether. Recent advances in single‑molecule techniques, especially optical tweezers, have provided high‑resolution force–displacement data for the tether that connects a cargo bead to the motor. The authors first develop a method to extract a non‑linear force‑extension relationship from these data, fitting the measured curve with a functional form that reduces to Hooke’s law at small extensions but exhibits softening (or saturation) at larger extensions. This relationship is then used as a spring potential in the mechanical model.
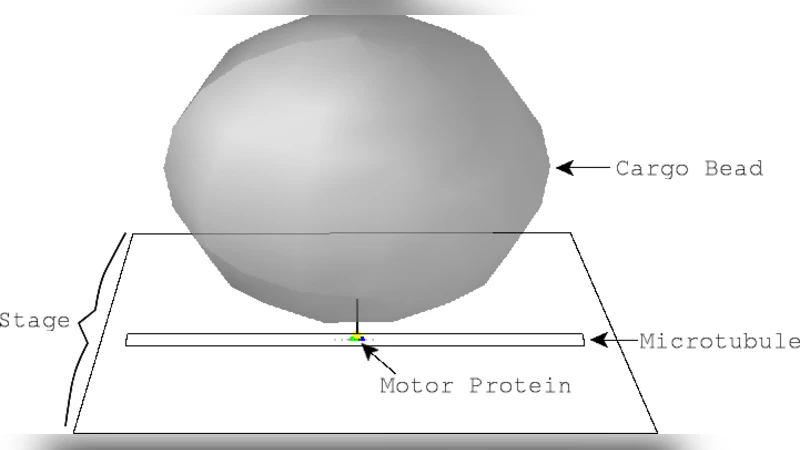
Mechanically, the system consists of two kinesin heads, a spherical cargo bead, and the microscope stage, all represented as rigid spheres interacting via excluded‑volume potentials (truncated Lennard‑Jones). The positions of the particles evolve according to overdamped Langevin equations:
γ · ṙ = −∇U + F_chem + ξ(t),
where γ is the viscous drag, U includes both excluded‑volume and the non‑linear tether potential, F_chem is an internal force that depends on the chemical state of the motor, and ξ(t) is Gaussian white noise satisfying the fluctuation‑dissipation theorem.
The chemical cycle is modeled as a four‑state kinetic scheme (ATP binding, hydrolysis, ADP·Pi release, and a nucleotide‑free state). Transition rates are load‑dependent, following a Bell‑type expression k_i(F)=k_i^0 exp(F δ_i/k_BT), where the effective force F is the projection of the total mechanical force onto the direction of the stepping head. By substituting the non‑linear tether force into this expression, the model captures how the tether’s stiffness changes with load and consequently modulates the kinetic rates.
To make simulations tractable, the authors introduce a two‑step protocol that separates mechanical integration from chemical stochastic updates. In the first sub‑step, the chemical state is held fixed and the Langevin equations are integrated over a short time window, producing updated positions and forces. In the second sub‑step, the forces are used to compute load‑dependent transition probabilities, and a Gillespie algorithm determines whether a chemical transition occurs. This decoupling exploits the timescale separation between relatively fast mechanical diffusion and slower chemical transitions, allowing efficient generation of long trajectories and reliable statistics.
Parameter values are taken from the literature (step size 8 nm, ATP turnover rate, viscosity of the buffer) and from the optical‑trap measurements for the tether (characteristic stiffness k_0, crossover extension x_c, and exponent n). Simulations are performed for a cargo bead pulled by a single kinesin under external loads ranging from 0 to 6 pN. The model reproduces the experimentally observed force–velocity curve: the average velocity declines from ~800 nm s⁻¹ at zero load to ~200 nm s⁻¹ near the stall force. Moreover, the randomness parameter r (a measure of step‑to‑step variability) increases from ~0.5 to ~0.7 as load grows, matching optical‑trap data. Crucially, when the non‑linear tether is replaced by a simple linear spring, the model underestimates the velocity at high loads, demonstrating that tether softening acts as a mechanical buffer that sustains stepping under load.
The authors discuss the implications of these findings. By explicitly modeling the tether’s elasticity, the work clarifies why kinesin’s force–velocity relationship is less steep than predicted by linear‑spring models and provides a mechanistic basis for load‑dependent stepping irregularities such as “step skipping.” Limitations include the neglect of tether torsional flexibility, the assumption of a homogeneous viscous medium, and the focus on a single motor rather than cooperative multi‑motor transport. Future extensions could incorporate rotational degrees of freedom, heterogeneous cytoplasmic rheology, and interactions with microtubule-associated proteins.
Overall, the study delivers a rigorously derived, experimentally grounded framework that bridges chemical kinetics and three‑dimensional mechanics, offering new insight into how the physical properties of the cargo tether shape the performance of kinesin motors in vivo.
Comments & Academic Discussion
Loading comments...
Leave a Comment