Point Normal Orientation and Surface Reconstruction by Incorporating Isovalue Constraints to Poisson Equation
💡 Research Summary
The paper addresses two fundamental challenges in point‑cloud processing: obtaining a globally consistent normal orientation and reconstructing an implicit surface from the same data. While many existing methods treat these problems separately—using local propagation, global energy minimization, visibility cues, or deep learning—the authors propose a unified framework that simultaneously optimizes the normals and the implicit function within the classic Poisson surface reconstruction (PSR) pipeline.
The key insight is that, in PSR, the vector field V generated from the point normals is linearly related to the normals (V = F n) and the indicator function χ (the implicit surface) satisfies the Poisson equation Δχ = ∇·V. By discretizing χ with compactly supported B‑spline basis functions, the PSR formulation yields a sparse linear system A x = b, where x are the spline coefficients. The authors extend this relationship by treating both x and the normals n as unknowns, leading to a combined linear relation A x = B n, where B encodes the linear dependence of the right‑hand side on the normals.
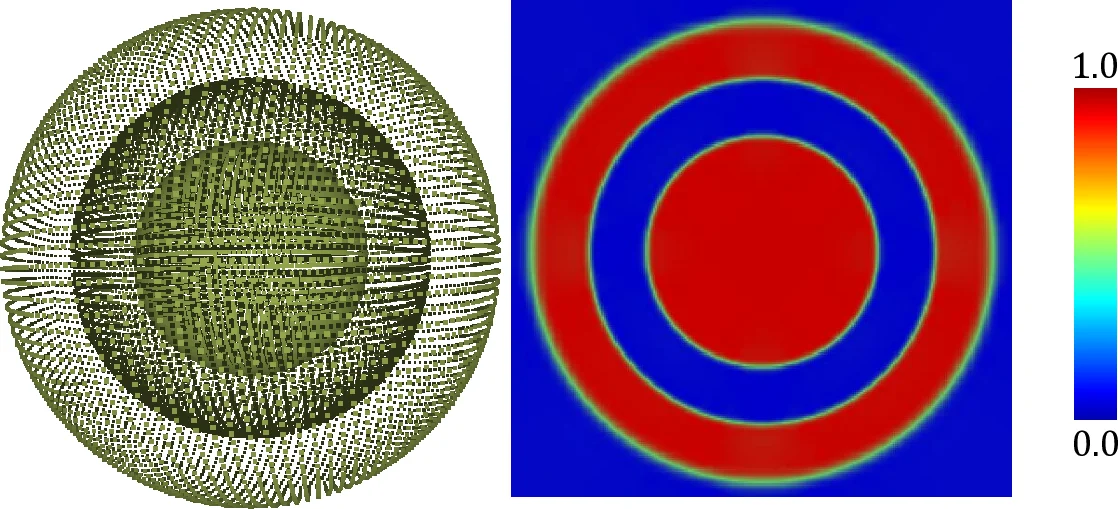
Beyond this structural equation, the authors introduce “isovalue constraints”: because the reconstructed surface is defined as an isosurface of χ at a target value τ (typically 0.5), the function values at the input sample points should be close to τ. This yields an additional term ∑(χ(p_i) − τ)² in the objective. The full energy therefore consists of three components: (1) the Poisson equation residual ‖A x − B n‖² enforcing the global relationship between the implicit function and the normals; (2) a local consistency term ‖n_i − n_j‖² encouraging neighboring normals to align; and (3) the isovalue term ‖χ(p_i) − τ‖² ensuring the implicit function matches the data. Weighted sums of these terms produce a single sparse least‑squares problem that can be solved efficiently with standard solvers (e.g., LSQR or Conjugate Gradient).
Because all matrices involved are highly sparse, the resulting system scales linearly with the number of points and can be solved on a typical laptop CPU without GPU acceleration. The authors also discuss a practical large‑scale strategy: they subsample a representative set of points, solve the global optimization on this reduced system, and then propagate the resulting implicit field to orient the normals of the full dense cloud via interpolation.
Experimental evaluation covers synthetic benchmarks with varying noise levels, non‑uniform sampling, thin structures, and multiple connected components, as well as real scanned data featuring nested surfaces and complex topology. Compared against state‑of‑the‑art methods—including MST‑based propagation, global energy minimization, dipole‑field propagation, PGR, and iPSR—the proposed approach consistently yields lower normal‑flip rates and higher surface fidelity, especially in challenging scenarios where local methods fail. The method also demonstrates competitive runtimes (seconds to a few minutes) and modest memory usage, confirming its practicality.
In summary, the paper makes four major contributions: (1) the novel integration of isovalue constraints into the Poisson reconstruction framework; (2) a joint optimization of normals and the implicit function that guarantees global consistency; (3) an efficient sparse linear formulation that runs on standard hardware; and (4) extensive validation showing robustness to noise, sampling irregularities, thin features, and complex topologies. The authors release an open‑source implementation, enabling reproducibility and further research. Future work may explore incorporating physical priors or deep‑learning‑based priors into the same optimization scheme to handle even more demanding reconstruction tasks.
Comments & Academic Discussion
Loading comments...
Leave a Comment